WHOGX5
-
Posts
792 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by WHOGX5
-
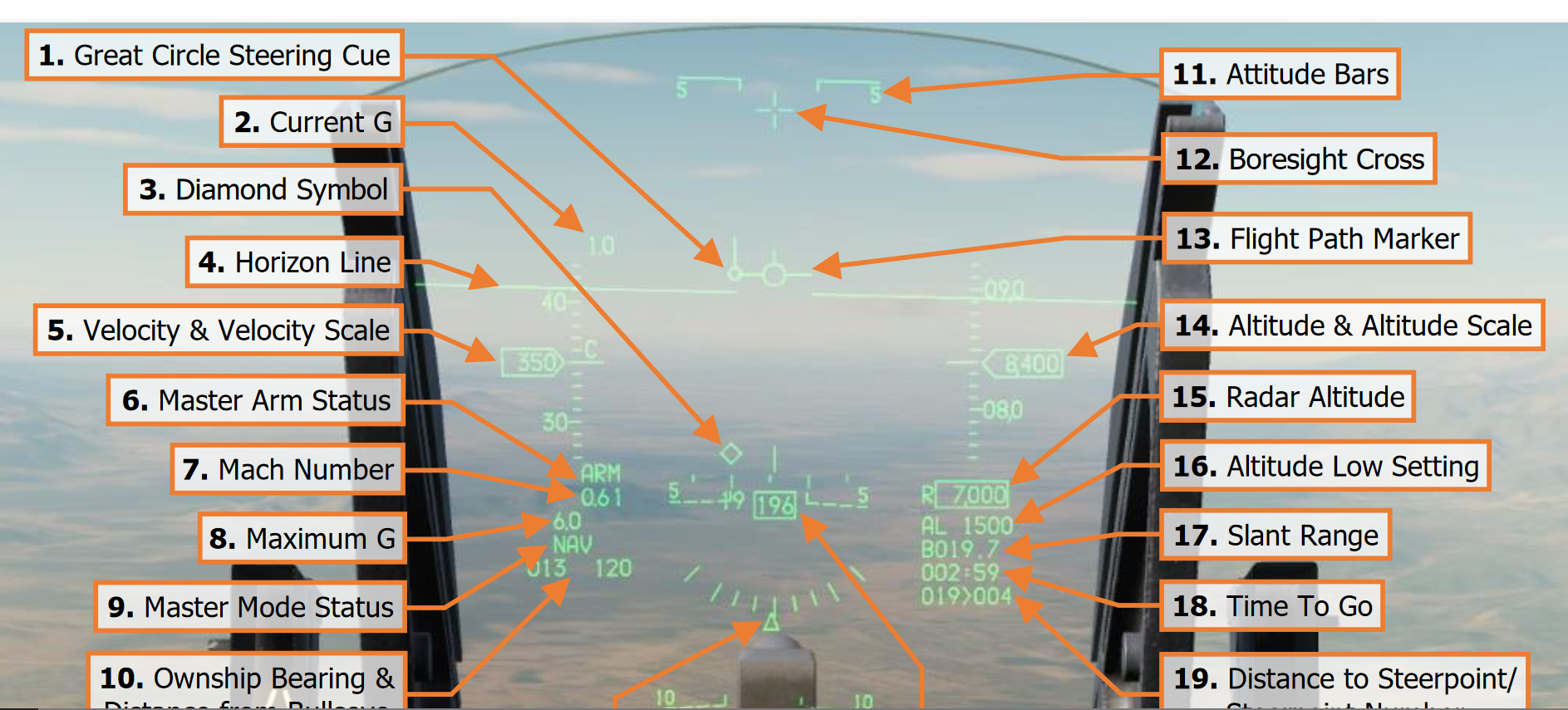
 In addition to what has been mentioned above, it could also be due to wind. Remember that you're not supposed to point your flight path marker towards the STPT diamond on the HUD, but you're supposed to fly towards the steering cue a.k.a tadpole (circle with a line going up from it) by putting it inside your flight path marker. The steering cue will always be wind corrected meaning that it will actually lead you towards the steerpoint, rather than simply having your aircraft point towards the steerpoint and fly somewhere else. If you wonder what the wind is you can display it by pressing RETURN on the Dobber/DCS switch to make sure you're on the main DED page, then press SEQUENCE on the Dobber/DCS switch to display wind. It will be displayed as "From heading / speed in knots". Anyways, here is a picture from the DCS F-16C manual showing the so-called Great Circle Steering Cue.
In addition to what has been mentioned above, it could also be due to wind. Remember that you're not supposed to point your flight path marker towards the STPT diamond on the HUD, but you're supposed to fly towards the steering cue a.k.a tadpole (circle with a line going up from it) by putting it inside your flight path marker. The steering cue will always be wind corrected meaning that it will actually lead you towards the steerpoint, rather than simply having your aircraft point towards the steerpoint and fly somewhere else. If you wonder what the wind is you can display it by pressing RETURN on the Dobber/DCS switch to make sure you're on the main DED page, then press SEQUENCE on the Dobber/DCS switch to display wind. It will be displayed as "From heading / speed in knots". Anyways, here is a picture from the DCS F-16C manual showing the so-called Great Circle Steering Cue.
-
DCS F-16C Early Access, what's left, what's next.
WHOGX5 replied to RyanR's topic in DCS: F-16C Viper
Does this mean that some of the features listed on the official DCS F-16C product page are not to be expected as a part of the full release DCS F-16C product? I'm thinking in particular of these two points: The most realistic model of the F-16C imaginable, down to each bolt and flake of paint, animated controls surfaces, lights, damage model, and landing gear. Detailed simulation of the Viper’s engines, fuel, electrical, hydraulic, comms, lighting and emergency systems and many more. Out of these two points, many of the systems mentioned are left in a kind of half-baked state. Whether it's all the external infrared emitters who are completely missing, the lack of cockpit spotlights, different systems not being electrically powered correctly during different tests and operating modes, SEC mode not functioning correctly, implemented systems not giving off MFL/PFL messages as they should, entire panels missing from the external textures of the aircraft, etc., etc.. I think it would be interesting for the community to know which features on the product page can be expected at full release, and in general if ED is planning to cut out any features which would be present in a USAF F-16CM-50 M4.2+ circa 2007 from the full release, or even post-early access? The list of post-early access features is quite limited, so are those the only features which will be added post-release?- 141 replies
-
- 18
-

-

-
Sorry, I was just annoyed by him backhandedly suggesting that I post a screenshot of a chart nobody has supplied to me. But I appreciate your help, and that screenshot tells me beyond a shadow of a doubt that it is definitely higher resolution on your end when I compare to the same page on my end. However, I cannot understand why this is? I have already set the highest possible texture settings. Is there any other setting which affects the resolution of the kneeboard in-game?
-
You are not helpful is how I see this.
-
I don't know which charts you are using and I do not use in-game charts, which is why I posted one of the real world charts I've been using so we can make a 1-to-1 comparison with the exact same image, and also so we can use an example of what would be used in the real world. And if you don't want to help me out to figure out the cause of this issue, then that is your choice, nobody is forcing you to be helpful.
-
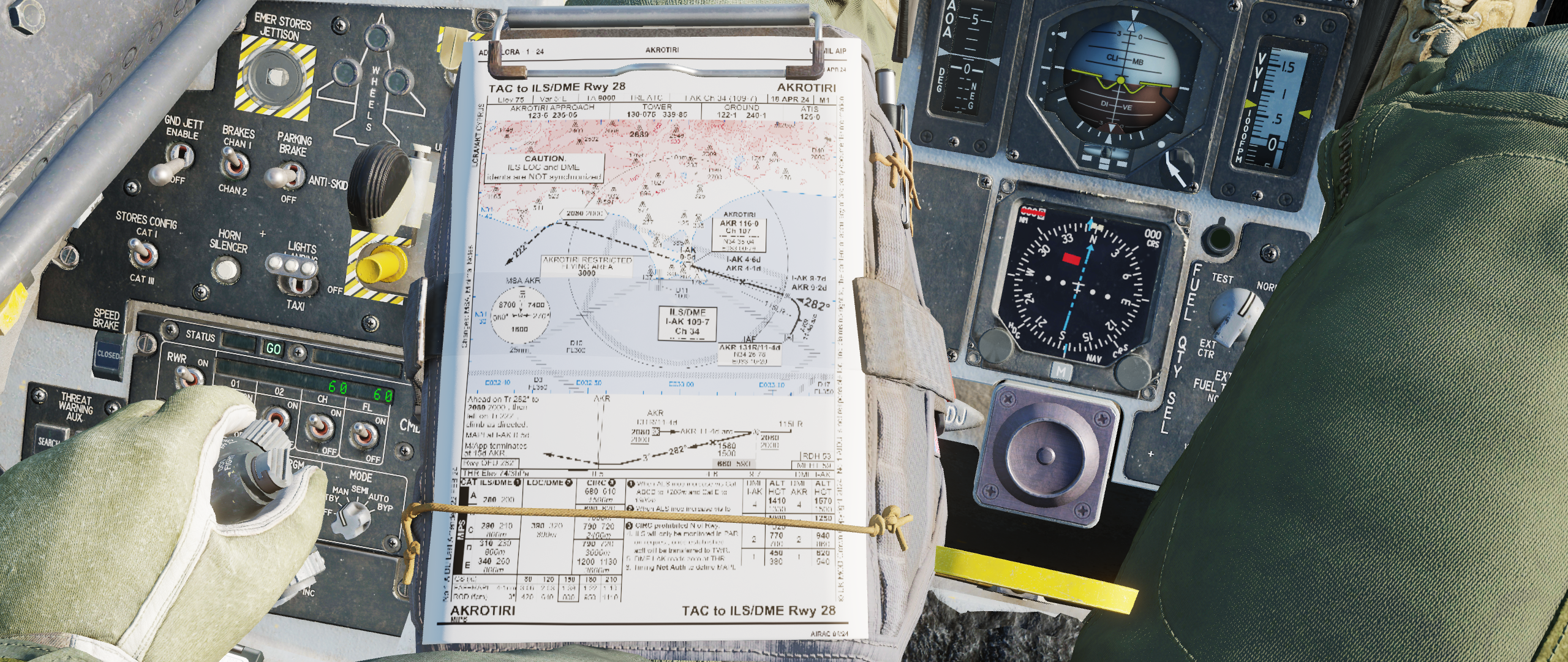
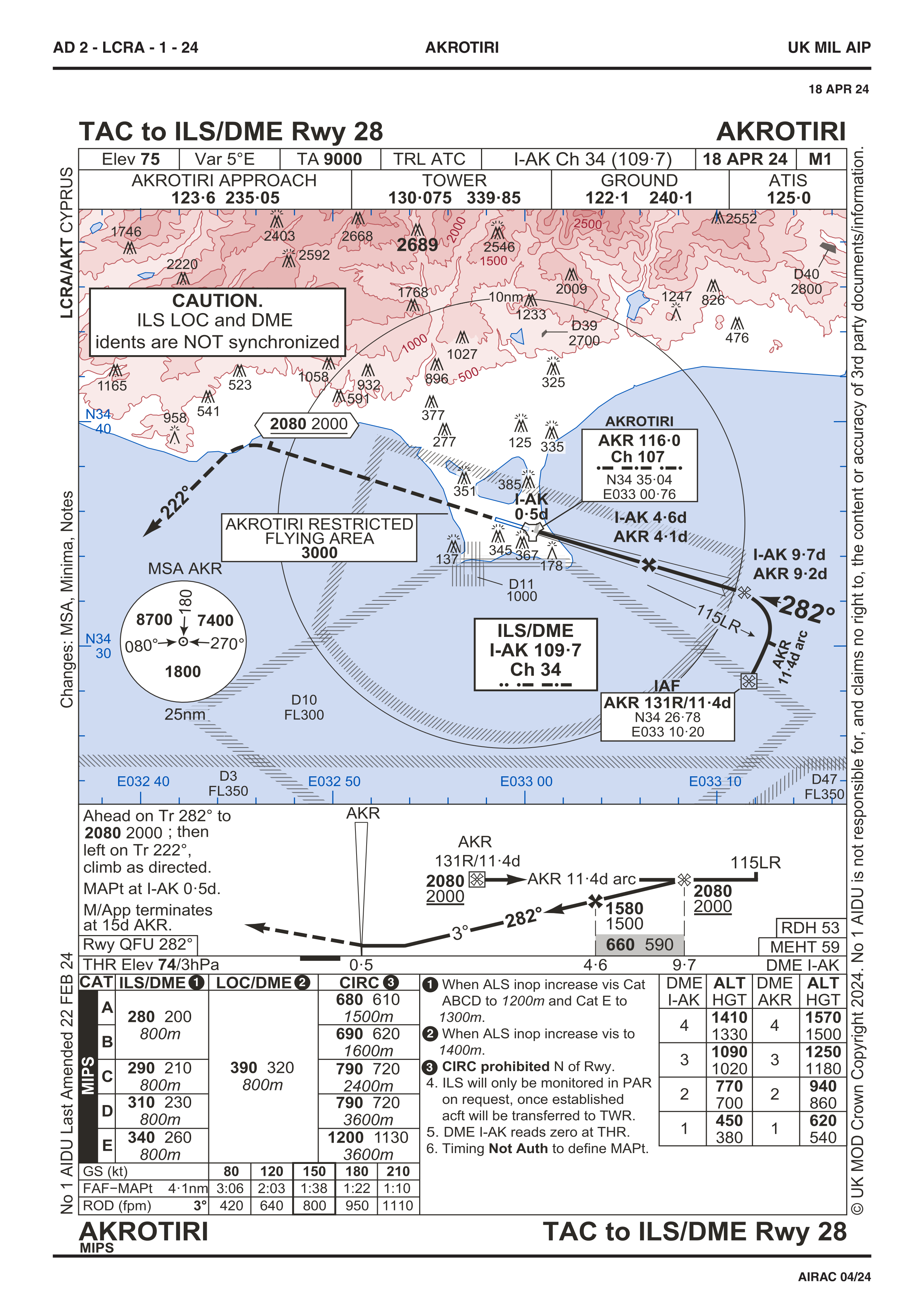
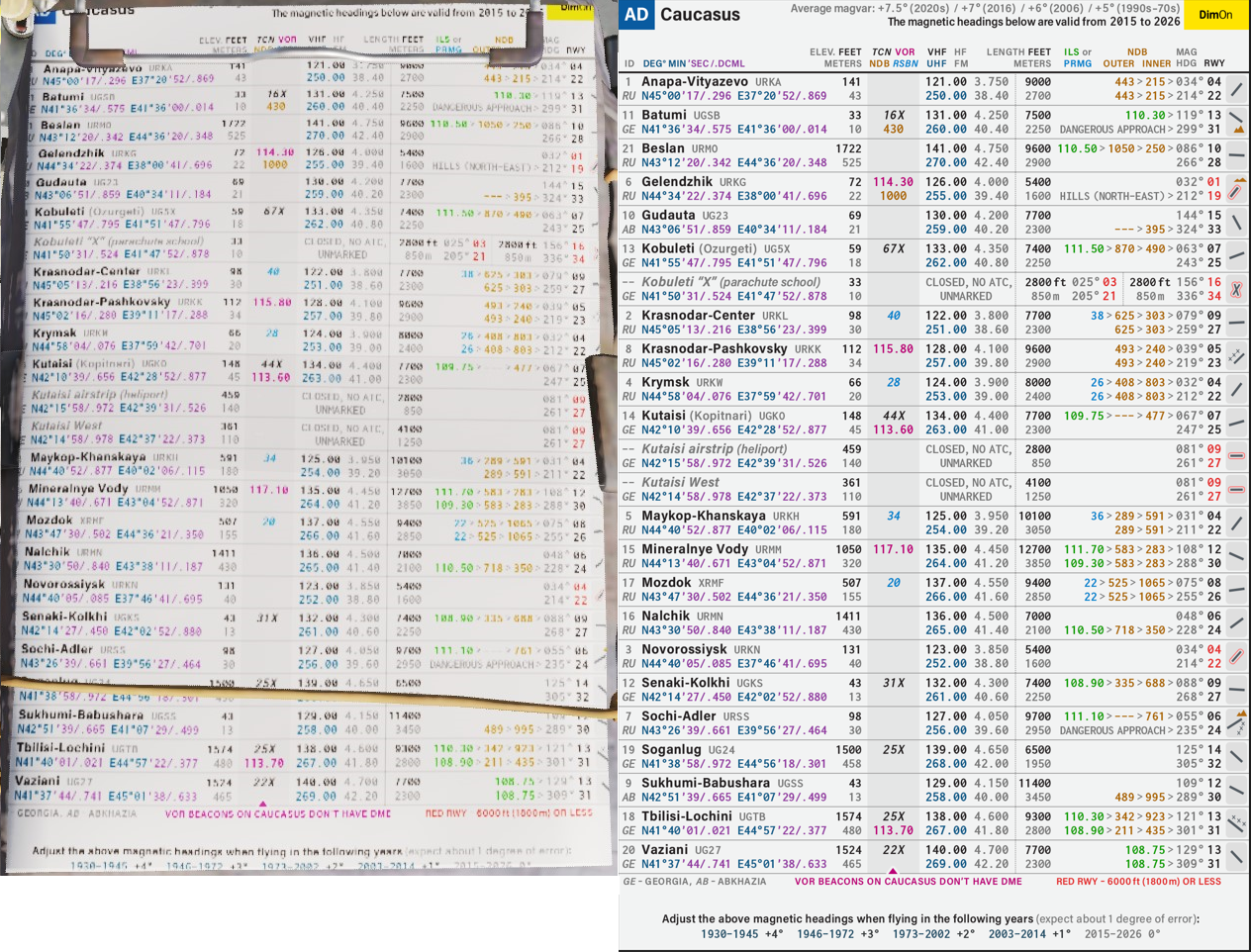
@buceador @Furiz @Viper33 Could you guys do me a favour and take a screenshot with the same chart as me so we can do a proper comparison? Below I have attached a publicly available approach chart for RAF Akrotiri. My in-game screenshot is taken with the highest texture settings, even cockpit displays are set to max for good measure. On my end, it looks like this...: Here is the original chart:
-
I mean, it looks quite clear in your screenshot because it's an incredibly zoomed in map with absolutely enourmous text. And if you zoom into the picture you posted, because of how far away and zoomed out the picture is, the pixels-per-inch of your monitor actually seems to be lower than the pixels-per-inch of the kneeboard, so you can't even tell from that screenshot whether the kneeboard is high or low resolution. But as I showed above, it is low resolution so there's no need to argue about that. If you'd actually put a real world aviation chart on the kneeboard, you cannot read the text at all because the resolution is way to low.
-
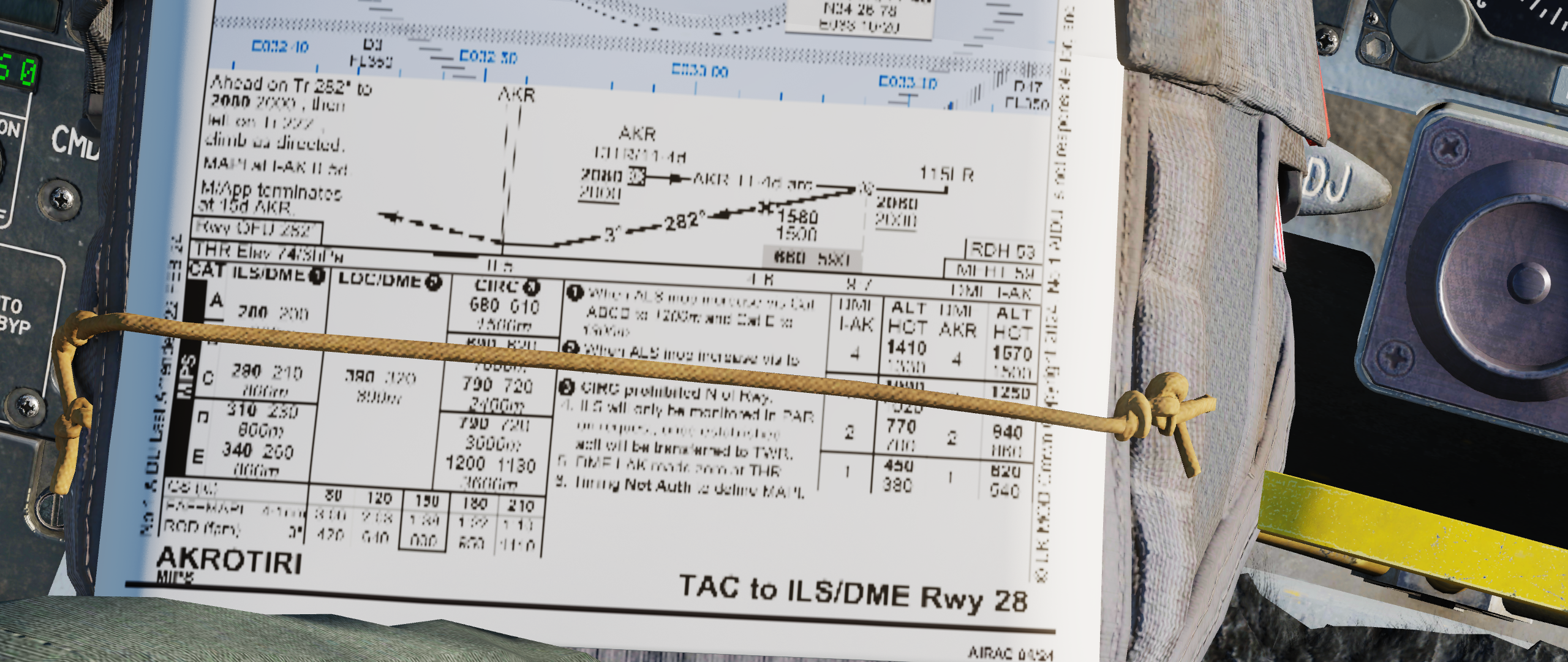
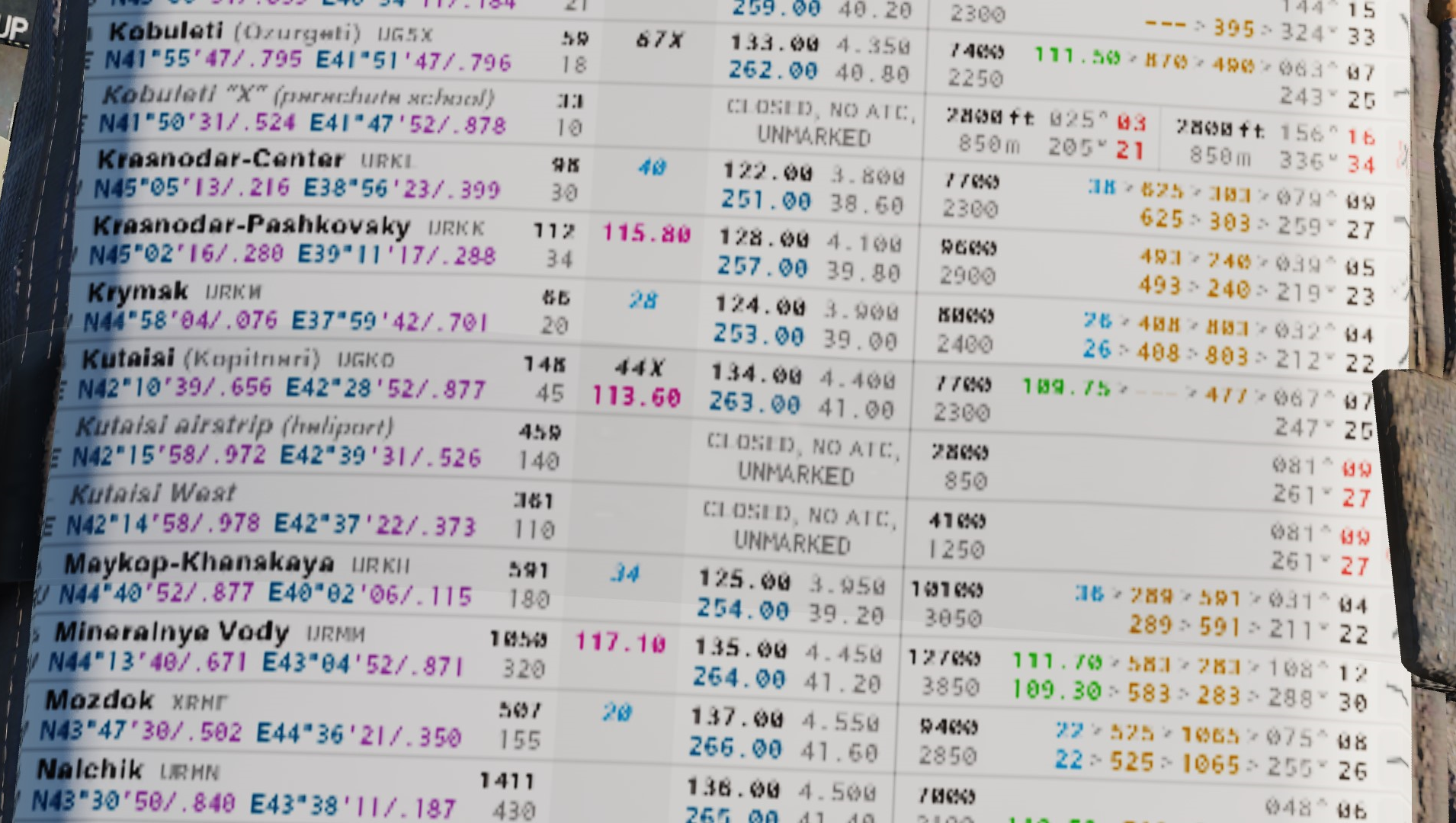
As you can see in the pictures below, the kneeboard pages have much lower resolution on the pilot body than the original file, and also much lower resolution than the "pop-up"able DCS kneeboard, making them very hard to read. In addition to this, the UV texture map isn't properly aligned with the page 3D model, leading to the outer edges of the page being cropped out. On charts where there is often text even smaller than this, it's completely impossible to see what it says. On the left you see the in-game pilot body kneeboard (looks the same on all texture quality settings) and on the right is the original page. At the bottom, I've also attached a zoomed in screenshot. As an example I've used the excellent "Aerodrome Data and Frequencies" pages made by Minsky: https://www.digitalcombatsimulator.com/en/files/3312200/ Here's also a zoomed in picture of the pilot body kneeboard resolution:
-
The main reason to perform Skate or Long Skate is simply to buy time. If you have a mission tasking like TARCAP (providing cover at a target which other aircraft are striking), then your primary goal is simply to protect that target, rather than score kills. In a situation like that, you usually have a designated time period where the strike package will be vulnerable, and as long as you keep all enemies away from the target during that vulnerability period, you have accomplished your mission. In that case it makes sense to launch your missiles as far away as you can, just to slow the enemy down. At those distances, as you pretty much know that the enemy will not be hit by your missile unless they willingly choose to fly into it rather than defending, you can for example choose to only shoot a single AMRAAM at an enemy 4-ship, simply to force them to defend. Then as you get closer and the probability-of-kill increases, you can increase the amount of missiles you launch as they now actually stand a chance of killing something. The downside of the Short Skate is that you don't have a lot of options left after that. You're cold just outside the Stern WEZ, you probably have an enemy behind you, and if your opponent is faster than you it won't take long until they can kill you even from the rear aspect. If you have superior numbers you might be able to recommit doing some kind of split with your wingmen, or maybe you can flee for long enough that some other friendly flight delouses you or your opponent figures it's not worth the fuel to chase you down. However, if you've got a long station time to keep, then fleeing for a prolonged amount of time isn't great for your fuel state. And yes, you can view all these distances as decision points. Nothing is etched in stone, situations change, and you've gotta be able to react to those changing circumstances. Like in the example above with a TARCAP mission, if your only goal is to buy time and you've planned a Skate, but you get a golden opportunity to actually kill the enemy, then that is obviously preferable to turning out and spending an additional 10 minutes wasting fuel and missiles just to buy time, only to eventually end up in a position where you need to kill the enemy anyways, just with worse odds, less fuel and less missiles than you had before. The important thing is just to make sure you accomplish your mission task in the best way possible, that's what your decision making should be based on.
-
I think a great feature addition to the new pilot body would be that if you move your mouse cursor in the vicinity of one of the pilots arms, he would then lift that arm up (maybe rest it on the edge of the canopy) so you can see the panels below his arm. This would allow the player to manipulate all switches in the cockpit, without needing to hide the pilot body everytime you need to flick a switch. Then, once the cursor goes inactive or moves away from the arms, he moves them back to their default position on the throttle and stick. This would greatly increase immersion, and also allow the player the ability to look at the kneeboards on the legs while manipulating various switches in the cockpit. Maybe it could also be an idea to add a similar feature to the pilots legs, where if you move your cursor close to one of the legs, the pilot body will slightly shift its leg inwards/outwards, depending on which side your cursor is, to make it easier to see around the leg.
-
Yeah, as I mentioned, all distances like those for long/short/normal skates, decision range, minimum abort range, etc. do not care about your own missiles or when you launch them at all. They are distances which are dependent on the enemy missiles and how quickly you can turn cold. They are only meant as pre-calculated distances which you can adhere to in order to safely employ different types of tactics. It is completely, 100%, absolutely mega separate from when you launch your own missiles. I think what you're trying to get at is which tactic to choose. As I explained previously, it depends on a lot of different factors. In real life, flight leads will call out the desired tactic for each engagement depending on what he thinks is appropriate, depending on the tactical picture, his own air forces doctrine, the acceptable risk levels for his mission, etc. Also, like you're touching upon, it might not make a whole lot of sense to employ Skate against a threat where the desired out range is so far that you're not even within Rmax1 range before you need to turn out. You simply have to choose what you think will be most effective and accomplish the mission objectives. Also, these tactics like Skates and Banzais are only the intention of doing something. Air combat is very dynamic, and a good pilot has to both be proactive but also reactive to changing circumstances. If you tell your flight to Skate, does not mean that your forbidden from changing that plan before you turn out at the DOR/MOR. Similarly, just because you choose to employ Banzai tactics, does not mean you're not allowed to turn out before the MAR if you notice that Banzai wasn't such a good idea. If you want to listen to how they do things in real life, there are some audio recordings on youtube of real world fighter pilots communicating with AWACS. There you can hear how they actually communicate with each other and choose tactics for each engagement. I've linked a video below which shows this pretty well. The subtitles aren't perfect, but it's good enough.
-
The only difference between a Skate and a Short Skate, is that during a Skate you turn cold with enough distance to be able to turn hot again, reacquire your target, fire a missile, and then turn cold again before reaching the MAR. Short Skate simply means that you intend to turn out before the MAR with no margin to be able to turn hot again. Neither Skate nor Short Skate really has anything to do with when you launch your missiles. When and how you launch your missiles will depend on the situation. Like you mentioned, during a Skate/Short Skate it makes sense to launch your missile when the M-Pole is equal to the distance at which you want to turn cold, as you'll be able to guide your missile until Pitbull. However, that might not always possible or desireable, so depending on the situation you can launch your missile both sooner or later than that. Remember that with active radar missiles (like the AIM-120) the missile can still acquire its target even without guidance, it's mostly a question of whether the enemy threat manages to maneuver outside of your missiles search cone before it is detected. So if you launch your missile "too late" and you have to turn cold before it goes active, assuming it wasn't to far from when it was supposed to go active or if the enemy threat hasn't maneuvered too much since you dropped the lock, chances are that it'll still be able to find its target. Sometimes you can even "mad dog" an AMRAAM without using your radar at all, and as long as you pointed your aircraft in the right direction before you launched it, it will (hopefully) find the target and kill it. So with these things in mind, you can choose to increase the risk of your missile not acquiring its target in exchange for a higher probability-of-kill by launching late, as that means your missile will have more energy. Likewise, you can launch a missile way to far away to have any real probability-of-kill at all, just in an attempt to get the threat to go defensive. Unfortunately we don't have the AIM-120's High PRF mode, or "Husky", in DCS yet, which would activate before reaching Pitbull and allow you to fire much sooner with the missile being able to guide itself against high aspect targets, as this would increase the distance from where you could launch your missiles. Regarding the turn back in, that will depend on your tactics and what kind of threats you're up against. In general, you just want to be in a position where the enemy will not kill you as soon as you turn hot. If you're up against a Su-27 for example, it will probably launch both radar guided and infrared missiles at you, plus it can track you with it's infrared sensor, so simply having no RWR spikes is not enough to know that you're safe. If you're up against a M2000C, you know that it only has short range infra-reds, so if you're not spiked and got a good couple of miles between you, you're practically 100% safe to turn back in. So for something like the Su-27, you'd need to know the distance and/or aspect of the threat, as well as waiting long enough that you know that any eventual AA-10D's (R-27ET) are out of energy, to know whether you're safe to turn back in. To figure this out you can communicate with your wingmen or GCI, reference your RWR or HSD, etc. Just remember that LINK 16 is not 100% accurate and can show quite old tracks, so in situations where everything happens very quickly, it is not very reliable. Also, the AN/ALR-56M radar warning receiver in real life would give you a lot more information about the relative lethality of a detected threat, but it currently doesn't in DCS so it's a bit useless for assessing whether you're "safe" or not apart from knowing if you've got nails/spikes. Lastly, it's also a question of what your acceptable risk level is. How much risk are you willing to take in order to kill that threat? If you're protecting a high value asset you might want to take bigger risks than if you're flying BARCAP over a piece of meaningless ocean.
-
I think this is because the DCS F-16C pilot model doesn't really move like a real F-16 pilot would. In DCS, when the pilot looks to the right he also leans his body to the right, just like you see in your picture. If you look at videos of real F-16 pilots however, they usually lean in the opposite direction of where they want to look. So in your pictures, the pilot would actually scoot, lean or push himself to the left in order to look over his right shoulder.
-
The EPU/GEN TEST switch is only meant to test the EPU GEN and EPU PMG without actually starting the EPU. Currently in DCS, the EPU/GEN TEST switch actually starts the EPU, expending hydrazine. Relevant information can be found in any -1 manual.
- 1 reply
-
- 6
-
-
-
PM sent.
-
If you go to the F-16.net website and search for PACAFI, you'll find a USAF document which lists the standard loadouts of multiple USAF airframes from the year 2003. If you look at the 35th Fighter Wing, which operates the F-16CM-50, in their standard loadouts you'll find both CBU-71's, CBU 89/104's and Mk-20 Rockeyes. The CBU-71/89/104 are not present in DCS whatsoever at the moment, but the Mk-20's are already in DCS but simply not available for F-16's.
-
I agree with your sentiment, but I don't see these two things as mutually exclusive. I think we can want a well functioning, fairly bugless DCS F-16C, while at the same time wanting it to to be accurately modeled for the Block and point in time ED has chosen to model this product after. I agree though that at this moment, bugfixes should be the main priority as there is not only an abundance of them, but more bugs gets introduced with every patch that is released.
-
investigating CRUS page TOS time potential bug
WHOGX5 replied to VarZat's topic in Bugs and Problems
It's an old bug. The issue arises when local and zulu time are in different dates. So in your example, 22:00 zulu is one day ahead of 02:00 local, meaning the TOS calculations will not work.- 13 replies
-
- 1
-
-
- crus page
- resave missions
- (and 1 more)
-
correct as is F-16 Parking brake not working since last update
WHOGX5 replied to void68's topic in Controller Questions and Bugs
I mean, QRAs in real life always have chocks in place. It would probably take the average ground crew about 5 seconds to remove them, so it doesn't really affect how fast you can get off the ground. It does however stop the aircraft from rolling around without anyone in the cockpit. -
Well, it shouldn't really be a wishlist item. It's an integral part of the Block 50, and it feels like ED would set a very strange precedent if they were to simply occlude it even though there is more than enough documentation explaining the workings of this system. I realize some systems cannot be implemented because of them being heavily classified, or them being something way beyond what could reasonably be expected to be included in this module, but to have such a major and well documented system as the DTS be omitted would be a weird decision, in my eyes at least. There are already post-DTS functionalities which we see in DCS, which wouldn't really be possible without DTS. Like the ability to create markpoints using the JHMCS for example. If all the aircraft had to go by was it's altitude and the angle your head was pointed in, you could expect several nautical miles of error in most cases unless you're flying over completely flat terrain. It is a nonsensical feature without Passive Ranging, where the angle you point your head in can be cross referenced against know terrain and elevation data to give you a pretty accurate markpoint. Seeing as the DCS F-16C seems to be the testbed for EDs new and improved INS implementation, it would make a great deal of sense to implement Terrain Referenced Navigation and Database Terrain Cueing as well. After all, these systems are not merely used by the F-16C and other aircraft, but by munitions as well. At the moment, for example, the Tomahawk Land Attack MIssile in DCS is quite useless. That's because they will simply fly into the side of a steep hill because it is incapable of seeing the terrain ahead, as all it has to go by in DCS is radar altitude. It works well in completely flat terrain, but any kind of hilly or mountainous terrain will yeet itself straight into all kinds of obstacles. I don't really fly many other DCS modules than the F-16C, because I love the F-16C, but I could imagine that the Slammers on the F/A-18C might have similar issues. Implementing these features which should definitely be a part of the Block and Tape of F-16CM-50 ED says they're developing, would carry over both to other aircraft that ED and third parties are developing, but also to various other weapon systems inside the DCS ecosystem. A lot of the work is already done, seeing as DCS is literally a digital terrain database. The main hurdle would be to implement Database Terrain Cueing, which would basically be a terrain following radar, without the autopilot part. After that is implemented, all the other remaining features mentioned in my post above wouldn't take a lot of work at all to implement.
-
Now that we've gotten the INS update for our DCS F-16CM-50 (great update by the way), I think it's high time that we discuss the Digital Terrain System. This is an old system which was implemented back in the M1 tape for the F-16CM-50, and therefore is something which should definitely make an apperance in the DCS F-16CM-50 which models a M4.2+ tape circa 2007. For some reason this system has never been mentioned in the DCS F-16C roadmap, and seeing as it is a system that adds A TONNE of capability to the F-16CM-50, many of which increase survivability and combat effectiveness greatly, I find it quite surprising that it hasn't been mentioned there yet. The DTS was introduced specifically to reduce the number of CFITs (controlled flight into terrain) as this was the single biggest source of loss of life in the F-16 fleet, and in doing this it also had the side effect of enabling multiple other features to be added to the aircraft. These systems are explained in great detail in various publicly available manuals and studies, so it should not be an problem gathering information. A quick explanation of what the DTS is, it consists of a Data Cartridge which can be used to load approximately 480 square nautical miles of terrain and obstacle data into your aircraft. Whenever you're flying "on map" (within the roughly 480 square nautical mile patch of terrain you've loaded into your aircraft), this is then used by the aircraft in multiple different ways, namely: - Terrain Referenced Navigation (TRN) Allows the F-16CM-50 to cross-reference it's radar altitude against the digital terrain database to greatly reduce INS drift (especially when GPS is not available). The usefulness of this system will depend on how featured the terrain you're flying over actually is (not very effective over the ocean or flat terrain like the desert). - DTS Predictive Ground Collision Avoidance System (PGCAS) The PGCAS is an advisory system which will give the pilot pull up warnings when they are about to fly into terrain. Without PGCAS, you can fly into a steep mountain side without any pull up warning, because your radar altimeter simply cannot detect the mountain face before it is too late. With the Digital Terrain System, the aircraft can calculate your flight path in complex terrain or in situations where your radar altimeter is not pointing downward (like when turning in a dogfight, or diving steeply towards the ground while dodging a SAM) and give you a pull up advisory with enough time to spare for the pilot to be able to avoid flying into the terrain. I'll also mention just to be clear that PGCAS is not GCAS, and the aircraft will not automatically avoid the terrain, it will just provide warning cues for the pilot to take action. - Obstacle Warning and Cueing (OW/C) The OW/C allows obstacle data to be loaded into the aircraft. Each obstacle will have a specified location and height, and whenever your flight path nears an obstacle, the pilot will get an advisory on his HUD, informing him that an obstacle is either straight ahead, or left/right of his flight path, in order to assist the pilot not to fly into this obstacle. - Database Terrain Cueing (DBTC) The DBTC aims to fill the role that the old LANTIRN navigation pods did in low altitude flying. DBTC will allow the pilot to select a desired height above the ground that he wants to fly, and the aircraft will provide cues to the pilot to follow to fly at that height based on the terrain data. This will function much like the LANTIRN did, except that it doesn't automatically fly the aircraft, but instead provides cues for the pilot to follow in order to maintain said altitude above the ground. When calculating the desired flight path, the DBTC will take terrain data ahead of the aircraft into account to give the pilot a smooth flight path that won't send him slamming into a hill or a mountain face. This will allow much safer low altitude flying in the DCS F-16C. - Passive Ranging In addition to all the points mentioned above, the Digital Terrain System also improves targeting accuracy. If you use the JHMCS to designate a markpoint for example, the direction you're head is pointing can be cross referenced against the Digital Terrain Database in order to give you a much more accurate designation that takes terrain elevation into account. Really all kinds of SPI designations where the FCR or laser might be unavailable, will be much more accurate.
- 10 replies
-
- 19
-
-
-
Shouldn't the AH-64D be able to send and receive datalink messages directly with F-16CM-50's, seeing as they both have IDMs who communicate over the AFAPD and TACFIRE protocols?
-
Actually, what should happen in real life for our DCS tape of F-16CM-50 is that the onboard and DL track should infact be correlated and the track identity should mipple between the onboard idenity and the DL identity if there is a disagreement. It is correct that the F-16C cannot correlate its own IFF interrogations to tracks detected by its radar, but instead it gets other aircrafts correlated IFF interrogations via DL to use in its own onboard identification process, based on ID criteria loaded via the DTC.
-
As far as I know, it is currently impossible to do absolute targetting in the DCS F-16C. I haven't bothered to actually report this yet or record a trackfile, but you will notice, especially at very low altitudes, that when doing a CCRP delivery with cursor zero and no offset, the release que will jump back and forward as you fly past terrain because the aircraft constantly updates the ranging to the target, which at low altitudes is often masked. Sometimes this will lead to the release cue blinking past the velocity vector, meaning that the weapon never releases, especially during lofting.
-
Hahaha, I was just thinking that it'd be easier to implement it while making the pilot model, rather than waiting until after it's released to add it. But yes, I'm eagerly awaiting the pilot model.