PL_Harpoon
-
Posts
302 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Everything posted by PL_Harpoon
-
Look what YT recommended to me today:
-
Engine priming is bugged-out at the moment. You can start the engine without printing it.
-
How do you know? I've only flown small civilian underpowered single prop but after years of flight-simming I was actually surprised how little* trimming or rudder work it required. In my opinion it's very difficult to assess how realistic aircraft's behaviour is. Even if you give if to real pilots you can have 2 pilots and 2 different opinions on what to improve or how much. You'd have to have someone who is both an experienced fligh simmer and flies the real plane to get accurate assessment. It is my belief that most aircraft (even the military ones) are relatively safe or "easy" to fly in most situations. * until you had to do a crosswind landing.
-
I think it's a common thing that the more the aircraft moves around the more alive it feels. It's also easy to feel that the more difficult the aircraft is to fly the more realistic it is. While both assumptions are somewhat true sometimes the developers overdo it. This is what I think happened with the Corsair on release. And yeah, if you already got used to the original behaviour the new one might feel like it's on rails.
-
Had some time to try it. No tests, just testing how it feels and I think it's a step in the right direction. The dynamic stability in yaw is much better now and it's not as sensitive in pitch. Roll rate is still too slow in my opinion. Other that that I'd say I'm happy with how it behaves in the air. On the other hand I think it's the only warbird in DCS in which you can hold the aircraft on the brakes at full power. I also think that the rudder is too effective at low speed during takeoff. Can't say whether its realistic or not just that it's worth investigating. There are other issues which prevent me from making it my daily flyer but it's a step in the right direction.
-
Just out of curiosity, when you're on the ground, with brakes on does the resistance change with increase in power?
-
Did you hold the stick all the way back in both cases?
-
Wait, I thought DCS does not simulate stick forces so it should be 1:1 in all cases, right?
-
Well, technically speaking if all the other forces remain constant increasing weight/inertia in a straight line would mainly slow the aircraft's acceleration. In a turn increasing inertia would slightly increase the turn rate. Decreasing pitch rate would just be a side effect. It would not fix the "twitchiness" of the aircraft which is the effect of low rotational inertia or moment of inertia. In other words I highly doubt they "just" put in a wrong weight number as it would affect a lot of other things: the aircraft would climb faster, accelerate faster, turn faster, top speed would be higher, it would be more affected by the wind etc. PS. I'm fully aware it's not our job to find the cause for this as we don't even have the tools to analyze the flight model at an adequate level, but since the devs so far didn't acknowledge (or deny) that this as a problem all we can do is speculate.
-
That was my first guess too. But if the similar inputs produce similar results (in my tests I did level turns at similar speed so the g-forces had to be the same) than it has to be something else. It's just a conjecture but perhaps it's either the torque produced by the control surfaces is too high or the rotational inertia of the aircraft is too low. Or there's not enough rotational drag to dampen the effects. In short, it's the poor dynamic stability of pitch and yaw that is the problem.
-
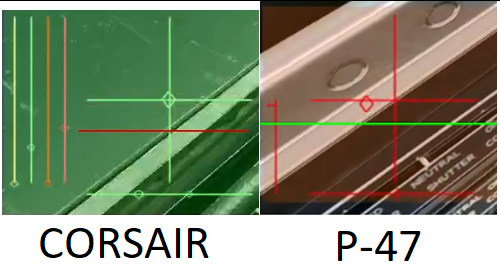
Continuing on the topic of stick deflection, I did some more tests. I took a Corsair and P-47 on a short flight and did some basic maneuvers to compare stick movements: 30 deg turn, 60 deg turn and pull up from a shallow dive. I then recorded both flights and compared stick movement on the inputs window. I drew a line at the bottom of the diamond at the lowest point (unsurprisingly both were at a 60deg turn). The results are interesting: null I chose P-47 because it too was supposed to have light controls and subjectively it's flight model feels very good. So it appears that while the F4U feels worse to fly it's not due to stick being over-sensitive. PS. I've added tracks from both flights if anyone's interested. Corsair Short flight.trk Thunderbolt Short flight.trk

-
Makes perfect sense to me. Speed = more pressure but also more lift (by the power of 2 if I recall correctly) so with speed you need less movement and more force. But my suspicion with the DCS Corsair is that it's too sensitive in pitch across the board. I'll try to record some footage to show what I mean.
-
True, but if <1cm movements* produce large difference in pitch than it's understandable to be suspicious. *based on the stick movement in the in-game cockpit, not my actual joystick. Try to compare stick pitch movement here with what we have in game. I'm not saying the flight model is garbage but some tweaks are necessary. EDIT: Here's a better example. Compare the stick movements with aircraft rotation. Then try to replicate them in DCS:
-
Here you can just about see the MAP gauge in the bottom right. It looks very similar to what we have in DCS (meaning it's probably not a modern gauge) and doesn't shake at all. Also, this is how much shaking I would expect from a period instrument: Notice that not only it's very small but it also disappears as soon as the engine reaches 1000 RPM.
-
Here's a million dollar question: does "light controls" mean that the aircraft controls do not require a lot of force to operate or that small movements produce exaggerated results? I doubt it's the latter.
-
I've found the manual with your chart and to add more confusion, mine comes from a later revision. This is from your chart: Corsair Manual.pdf null This is from mine: F4U-1D Real Manual.pdf This sentence also could be the hint that higher MAP could technically be achieved, but shouldn't. That would also explain 61" during my tests and would mean that MAP simulation is at least good enough. My new guess as to why our charts differ is perhaps this is a safety issue. No two airframes are the same and after a while they decided to increase the safety margin.
-
Two more things came to my mind: 1. At WEP you're not really concerned about efficiency since you want as much power as possible. 2. The asterisk in @felixx75 's chart is for Mil power so the reason to use 2550 RPM for WEP must be different.
-
Since I'm getting 61" at 20k I'm not so sure about that.
-
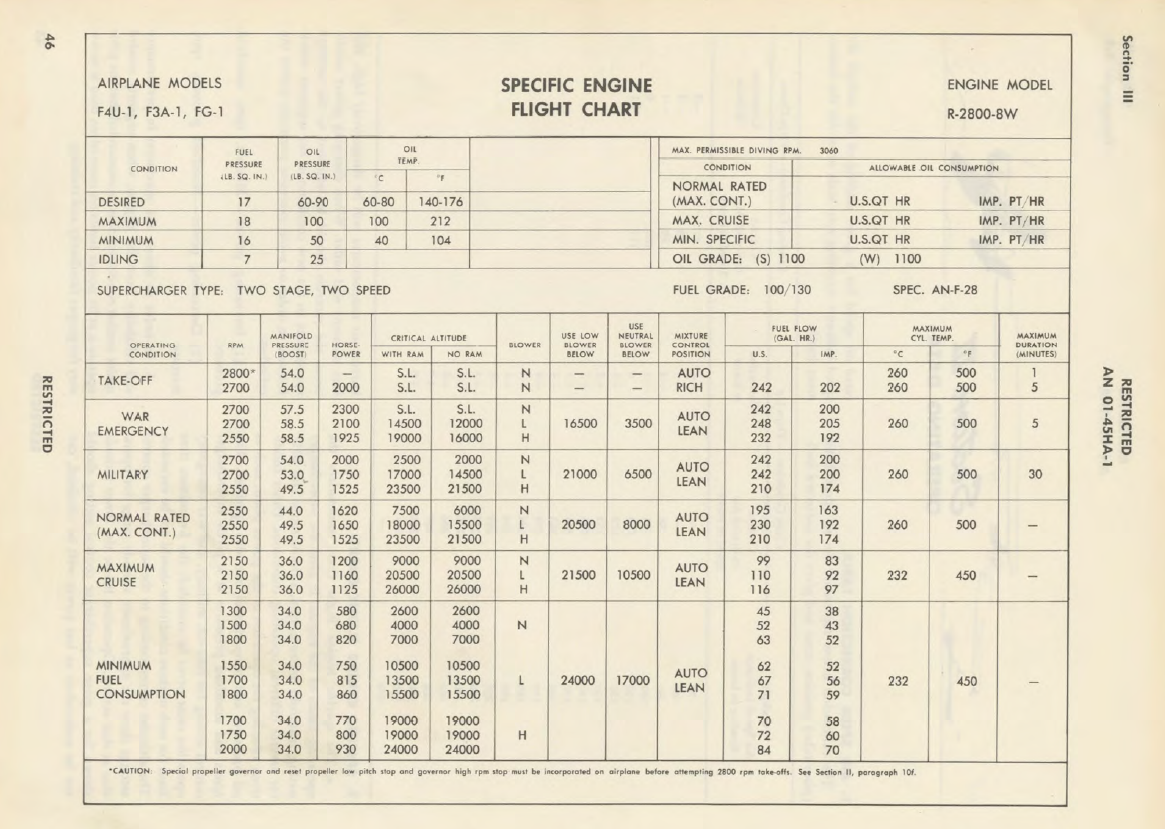
I was asking because at 20k ft I was easily getting 61" at 2700 RPM. I find it strange especially since in the manual provided by M3 there's even lower MAP What's also interesting is the recommended 2550 RPM which corresponds with another Engine Flight Chart I found: Why 2550 RPM? Should the engine not be able to sustain 2700 RPM (which to me seems odd since it's a matter of pitch angle)? Or does 2550 provide more thrust (in which case I also don't quite understand how)?
-
Where did you find that number?
-
Perhaps this can be of use: Corsair f4u-1d-detail-specification.pdf
-
Here's my file structure: nullnull Here's what I did just now: Made a new mission in ME, placed a Mosquito as client (start from ground) and ran it: mod didn't work - the horn was present. Quit to desktop, restarted the game, run the same mission from the main menu: it worked.
-
Did a quick test myself. Sea level, 15 deg C, Standard atmosphere, fully fueled, all coolers, cowl flaps, canopy etc closed. MIL (2700 RPM, 54 MAP): max speed 297 kts, average was about 294kts vs 304kts from the chart above (converted from MPH) WEP (2700, 58.5 MAP - looked more like 60 to me but the needle was shaking): max speed 314kts, avg about 310kts vs 317kts from chart. In conclusion: a bit slower but not much.
-
Worked for me, but one time I had to restart the game for it to work.
-
Until it gets fixed you can turn it off completely with a quick workaround: