HWasp
-
Posts
645 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by HWasp
-
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
First of all, I don't want to claim, that the currents changes are perfect, and no further tuning is needed, BUT it is very positive, that problems are being acknowledged and changes are made. I'm sure it will be improved further. That being said, your post is a complete exaggeration. Smooth control inputs are needed now, that is all. Claiming, that is is ruined now, and can't hit anything is just simply bullsh.t... Excuse my sh.tty flying skills, but what is so difficult about making barrel rolls around an airliner now with the current FM?? Even I can do it (sort of). MiG_19IL_762.trk -
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
Well, it is certainly more realistic, than it was before, you like it or not. I'm sure it can be improved, tuned further over time. For me the important thing here is, that the previous pitch behaviour is gone. Just because something is "9 ton" doesn't make it magically stable. There is a thing called inertia, so if you introduce a high pitch rate with a sudden stick movement, it won't just stop because you stopped the stick, it will overshoot... -
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
Thank you for the FM improvements last patch! I have just tried it, and I think it is great, feels much more realistic. Very nice to see, that problems are being adressed, looking forward to the MiG-23 and F-15! -
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
Just to be perfectly clear, this is regarding the subject of the topic only, not a general comparison. I am not claiming, that those 2 module's FMs are superior overall, this is just an opinion about this particular aspect of the fm. Also, again, to be very clear, this topic is NOT about it being difficult to fly or not, it is about the specific subject of dynamic stability, how the aircraft behaves after an abrupt control input compared to some other modules. (Are the F-86 or MiG-15 difficult to fly in DCS? No, not at all.) BTW, a lot of these 10 hour Spitfire pilots died during training, so it might not be the best example. Although, of course it was not the "flying" but the take-off and landing, that got them mostly... -
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
Hey, thanks for the condescending reply, great way to start the usual sh.tshow To be honest, the only jet I ever flew was the 737 (400 and 800) irl, and obviously my experience of the extremes is from the full flight simulator, so I'm not a 19 expert of course, but let me tell you, that the 737 being a f.... airliner is much more sensitive in pitch at high mach high altitude, and it is much more prone for oscillations in the low speed high aoa region (obviously I don't know what she does at 550 kts on the deck...). I am looking for a constructive debate, I don't claim that I know how the real MiG-19P flies, so let's try and keep this civil. I am comparing the MiG-19 module to the ED MiG-15 and F-86. For me those 2 behave much more natural and believable while also being completely stable and controllable. Do you have either of those modules for comparison? -
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
With ARU-2V set to manual mode and to maximum control deflection / stick input ratio (low speed mode), still around 40% of the max pitch input is needed to achieve 8 Gs over 1000 km/h. I'm not claiming that this is wrong, but I certainly find it strange, that the aircraft is still this easy to control in this config. If the real aircraft was this tame and easy to fly in this configuration, it raises the question for me, why they implemented the ARU-2V at all? MiG_19ARU_Man.trk -
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
Sorry, but what are you talking about? I have made a comparison to the MiG-15 and F-86. Where did you see modern FBW aircraft with relaxed stability mentioned here? Excessive stability due to very far forward CG has a large performance penalty IRL, I'd be interested, what is the normal CG range for the 19P compared to 2 other modules mentioned. Other than this, it is also interesting for me, that I am having better results flying and fighting in the 19 module with ARU-2V set to manual with maximum control deflections to stick input ratio (low speed mode) even at high speeds. MiG-21s did suffer accidents due to pilot induced oscillations when their ARU-3V failed. This makes me wonder why the system is even installed in the MiG-19, if it is perfectly controllable without it even at highs speeds. (For me the MiG-19 is less sensitive in pitch with the ARU set to maximum control deflection to stick input ratio manually, than many other modules in normal config at high speeds) ((no curves!)) -
Alternatively there could be a second (virtual) dial to set the gauge at much higher rate.
-
You simply need to buy either pedals for your warthog or get a stick with a twist axis. It's a primary flight control, it is not optional. You should post a track, that shows, what you think is incorrect behaviour. For me pitch control is fine with a crappy old X-52, no curves.
-
I checked what happens during a roll with time slowed down to 1/4, there are certainly rudder movements commanded by the yaw damper, so it is trying to do it's thing, but seems to have limited authority. For me, at low AoA, as long as I use less than half aileron (already 90deg/sec+ I think), slideslip is not a big issue. It really is quite different to the others, but I wouldn't jump to any conclusions just because of that. Switched off the damper, and there is a difference for sure, so the system is doing it's thing.
-
Everybody noticed? I fly it with a simple joystick, no extensions, no curves, no problem... Don't come up with claims like that, it is not uncontrollable in any way. I don't have a real rudder as well, only a twist axis on the stick. That is a real control axis though. If you are using some non-standard workarounds to control rudder axis, then you should not blame the module for being difficult to control. It's a basic aircraft control, it needs a proper control axis.
-
You need to use the rudder when you make a roll input and keep the ball centered (the slideslip indicator on the bottom of the main artificial horizon) At higher AoA more rudder is needed! At very high AoA use the rudder only if you want to roll.
-
My conclusion ! and first of all, congratulations on your first module
HWasp replied to Falkaroth's topic in DCS: Mirage F1
I think a big red "WTF??" is a bit too much. Nothing wrong with constructive criticism, but I don't really see this thread as constructive, since it is not pointing out hidden bugs and issues, but some (I think) obvious wip. things, that are really not that important, since we are talking about a simulator product. I think, the devs produced a very high quality module (FM, systems), so they deserve a bit more respect. -
My conclusion ! and first of all, congratulations on your first module
HWasp replied to Falkaroth's topic in DCS: Mirage F1
I couldn't care less about a couple of low res textures here and there, and things like the pilot model. Functionality is excellent, it feels like a complete module already. Limitations are modeled, which is really, really nice, the plane cannot be abused in unrealistic ways. I think, the devs had their priorities right, and this is maybe the best EA release I've seen for DCS. I'm sure these small issues will be adressed later. -
Guys, for 80€ you can't even fill up your car completely in Spain (and in Europe in generally) nowadays... Seems like a top quality module to me, I'll get it as soon as I get home. Arguing about the price now is a bit rude, creating a module like this is huge amount of work and obviously not a get rich quick scheme for devs. It's very unfortunate, that some might not be able to afford it, but a thread like this is not the proper solution. Just wait for a discount if you need to...
-
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
MiG-29 had issues with the stability augmentation system not being simulated correctly, as it turned out, now it is completely tame imo. (unless you take off before the warm-up of the system is done ) Both F-4 and Tornado have Stability Augmentation System, I don't think they are really good for a direct comparison to old MiGs. Sounds interesting though. Did you have the opportunity to test the extremes in those sims? -
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
I don't think other DCS modules have "insane" pitch oscillations at all. What aircraft did you fly, that would suggest otherwise? Also control inputs made during the tests were not exactly "normal operation". For me, the other modules feel more realistic in this regard, compared to anything I've flown or seen flying. Do you think the MiG-15 or the F-86 have a problem with oscillations? For me they are totally controllable and very stable. -
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
ARU-2V does not dampen or stablize, it just changes the ratio between the stick input and elevator motion according to speed and altitude. (Less elevator motion for a given stick input as speed increases simplified) -
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
Overall I think the MiG-19 has the least amount of oscillations (at least regarding non FBW modules) It returns to the original AoA twice as fast as the other modules, and that seems quite strange to me. -
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
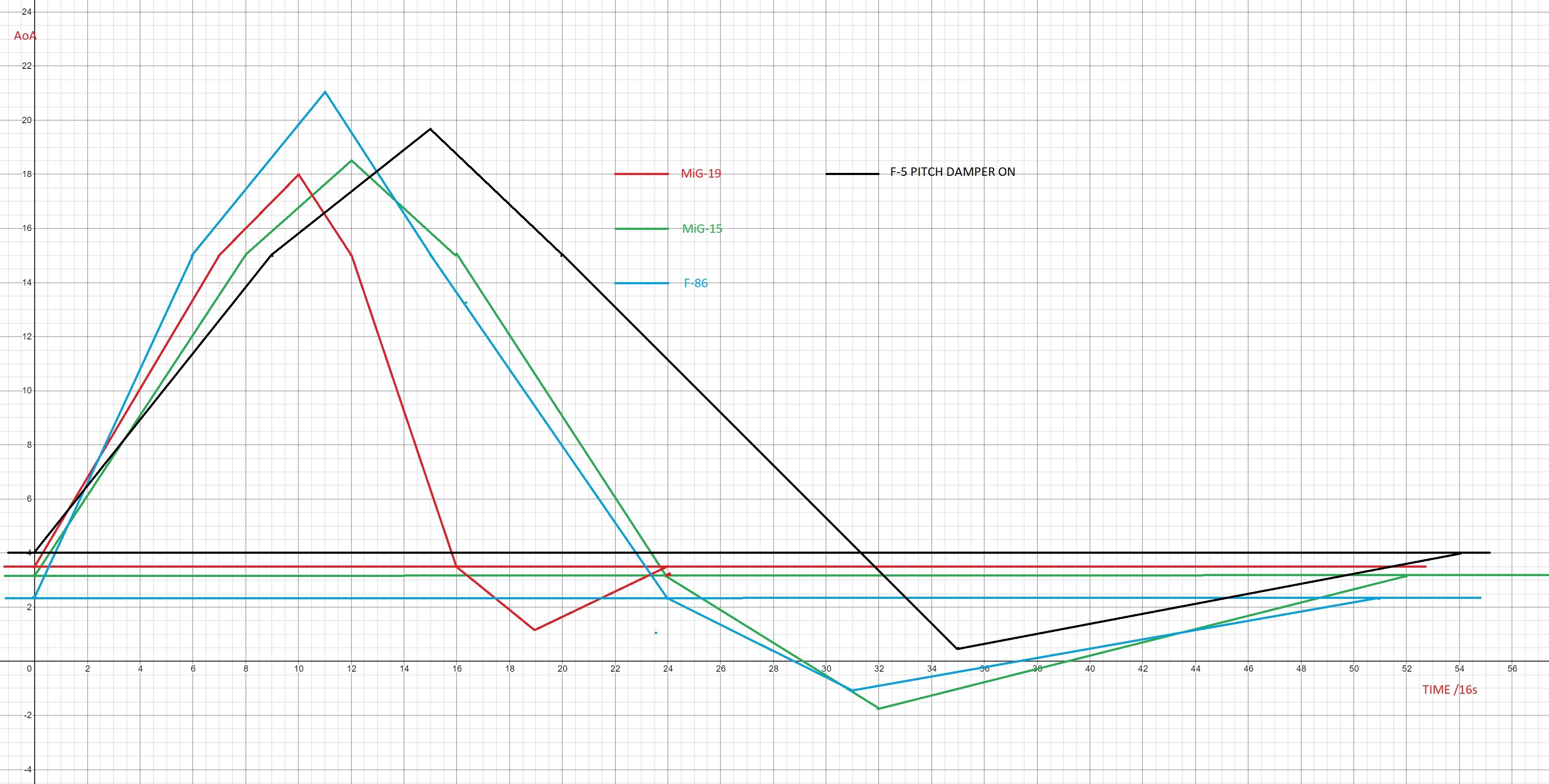
MiG-21 is much less stable. I tested the F-5 with the Pitch Damper ON though :
-
MiG-19 FM Dynamic stability comparison to MiG-15 and F-86
HWasp replied to HWasp's topic in MiG-19 Farmer B
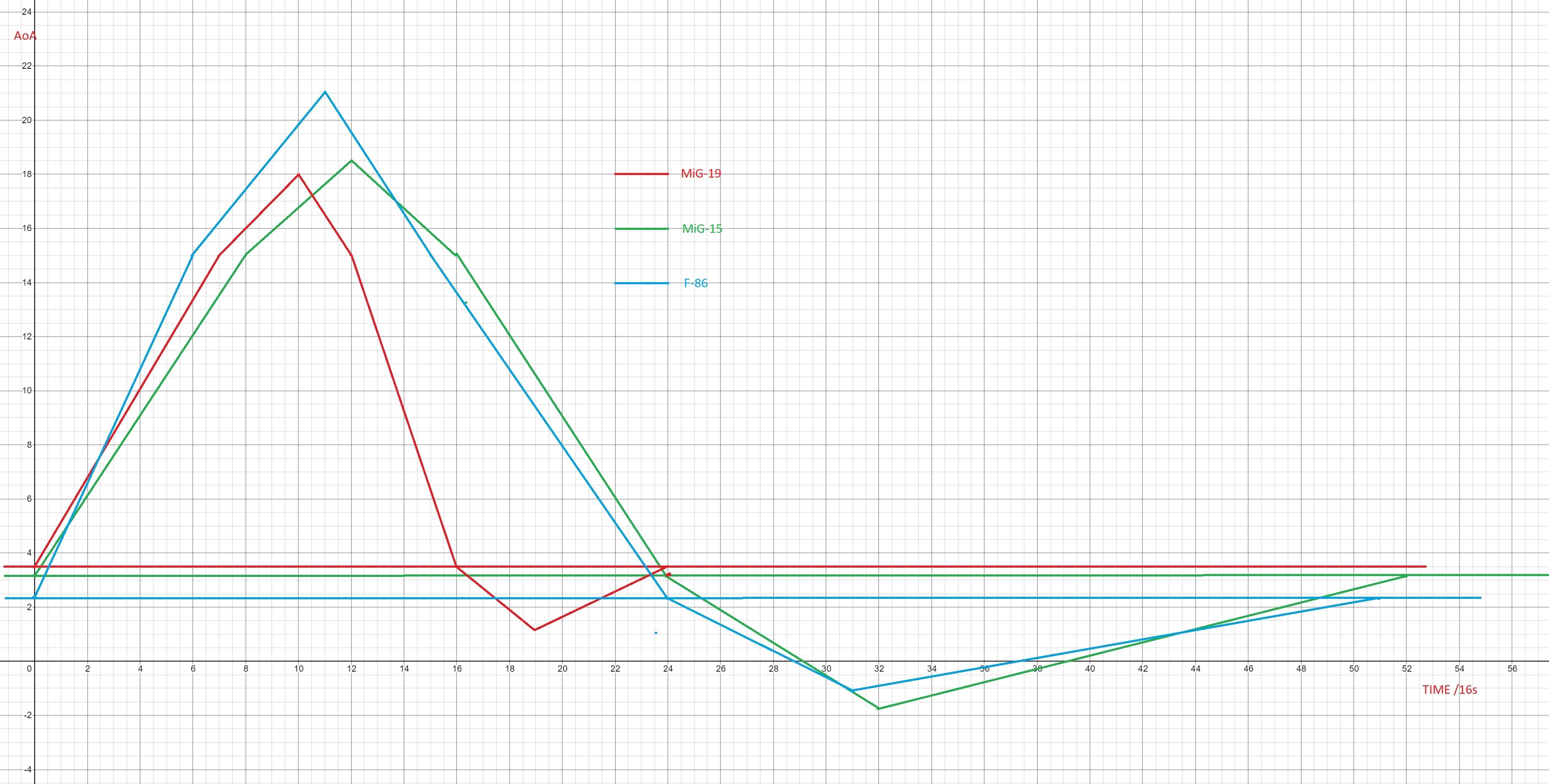
As you can see on the chart, all 3 planes make similiar oscillations in pitch, but the MiG-19's oscillations have much less amplitude, and return to the initial state extremely quick. The MiG-19 does not have a pitch damper or anything similiar. Is there any reason, why the 19 should have such high dynamic stability? Please see tracks attached (Slow time to 1/16 or more to be able to see what is happening) MiG-15Dyn1.trk MiG-19Dyn1.trk F86Dyn1.trk -
I have tried to compare the dynamic stability of the modules above (the oscillations after a certain pitch control input). !!Test was done and measured with time compression set to 1/16 (time slowed to 1/16)!! My method was to trim the planes to 1G flight at around 250 - 260 kts, then full aft stick until AoA = 15 (infobar), then release stick to neutral and observe the oscillations !!Test was done and measured with time compression set to 1/16 (time slowed to 1/16)!! I've drawn a chart to show the resulting oscillations:
-
The way I think this could work well: Use the existing scan elevation at selected distance Jester menu and create a bindable command to change the selected setting +/-5000 feet (basically toggle between the existing menu settings) The current Jester menus are ok to set up the radar initially, but as the fight gets closer, it gets way too slow (and annoying)
-
Thanks, I'm sure that is useful, and works well, but I personally don't really want to get 3rd party tools involved, just make a really basic Jester function work properly.
-
... Why is it not realistic to bind a Jester command to move the elevation by a given amount? Commands to set range and move scan zone left or right can already be binded. Why is this different? This is a very very basic thing and it is extremely annoying to go through all those jester menu layers all the time.