nomdeplume
-
Posts
2558 -
Joined
-
Last visited
-
Days Won
4
Content Type
Profiles
Forums
Events
Everything posted by nomdeplume
-
Theater of operations KMZ
nomdeplume replied to lawndartleo's topic in User Created Missions General
If you use the 'go advanced' button you'll get an option to upload attachments to your post. That's probably the easiest way. You might need to zip the kmz file first though if it's not one the accepted extensions for attachments. -
Vertices and shadows etc. only matter if they're being rendered, and they're only being rendered if you're actually looking at them. LOD also probably comes into play to make them much cheaper to render unless you're up close. So the graphics hit only comes into play if you're actually admiring their prettiness. It's not really a major task to track an object until it hits the ground. I'd be surprised if these things even detected collisions with other shells, let alone other game world objects. If they were actually doing collision detection against every other game object then you'd probably see a performance hit, but IMO this is a pretty negligible bit of processing for the 99% case -- shots being fired while you're not looking in that direction or are too far away to see details. There's no AI and only be most basic "physics" calculations being applied. Anyway, it's only a few hundred shells, and as noted before, most of the graphical models in DCS are very detailed: the engine is designed to render a lot of polygons. In most cases that you're close enough to see the shells in any kind of detail, you're going to have very few other objects in view (e.g. the example screenshots you posted), so you may as well give the engine something to render. :) People making cool videos would mind that the shells looked crap. People not making cool videos won't incur the 'cost' of rendering the shells up close, so what does it matter?
-
You might've already worked it out by now, but for the refueling whenever an AI group is told to execute a "Perform Task: Refuel" command, they'll seek out the nearest tanker and refuel from it. The task finishes once all members of the flight have tanked.
-
No, trigger zones don't have an altitude. If you want to only trigger something if a unit is above a certain altitude, you'd need to use an additional condition, i.e. 'unit in <zone>' and 'unit altitude above 500'. However that's only helpful if you're able to design the trigger around specific units.
-
Formation setting in user made missons
nomdeplume replied to Charlie_01's topic in User Created Missions General
Yes, there's a 'Set option' command relating to formation in the advanced waypoint properties. -
The scroll wheel can also be used to 'zoom' around the terrain without having to hold a key down. It basically works like an accelerator, i.e. scroll it one way and you'll start moving forward slowly. Keep scrolling that direction and you'll go faster. Scroll it the other way to slow down. Also LCtrl+F11 gives you the free camera from anywhere. So you can use it in the cockpit view to jump to the external free-roaming camera at the same spot. Or if you're viewing a vehicle with F7 hit Ctrl+F11 to be able to roam freely around the area.
-
Next DCS (US) Fixed Wing Aircraft Wish List
nomdeplume replied to diecastbg's topic in DCS Core Wish List
Unless they added that so Black Shark pilots could take off from and land on rolling ships... ;) -
You can easily check - the corrected installer is known as DCS_BS2_EN_Upgrade while the original was DCS_BS2_Patch_EN.
-
Change Alliances after Mission Creation
nomdeplume replied to AngelAtTheTomb's topic in User Created Missions General
Not through the UI. You'd have to edit the mission file itself (make a backup first!). Maybe try saving a new mission with the coalitions you want and then compare the mission file to your original. I do want to do this myself, but I suspect I'll be living in Skyrim for the forseeable future so I probably won't have a chance to look at it for a while... :music_whistling: -
Next DCS (US) Fixed Wing Aircraft Wish List
nomdeplume replied to diecastbg's topic in DCS Core Wish List
There's (at least) three issues. One is the ability of the graphics engine to render highly detailed terrain from altitude. That can be solved by having various mechanisms for reducing the complexity of the visual environment when you're a long way from it. It's still a very complex problem to solve though, especially if you're flying something with for example a targeting pod. You can't simply not load any detailed object and terrain data for things that are more than a few km from the player's position, because you can point the TGP at anything at any time and expect to see what's there in high detail. Nobody's going to appreciate playing a sim that thrashes the drive constantly every time you try to pan the targeting pod around. The next issue is with AI and related things. Just because the player can't see something, doesn't mean it's not happening, doesn't mean it's not going to have some effect on them, and doesn't mean it can necessarily be simplified. Combat can be going on in any location across the entire DCS map at any time, and for that to be resolved 'correctly' requires a constant level of detail of the environment for pathfinding, collision, evasion, etc. If you have a "bubble" of detail around the player and less detail elsewhere, you can easily have situations where a particular force vs force encounter will go one way if the player happens to be nearby and go a completely different way if the player happens to be elsewhere. The third and maybe largest issue is actually generating a large expanse of very highly detailed terrain in the first place. This is the thing that results in the vast gulf between 'flight sim' terrain and 'shooter' terrain. Flight sims need to cover massive areas and it's impractical for people to make every part of it look really nice. It's mostly computer generated from various sources of topographic data, with human touch-ups where needed - which still tends to be a massive amount of work. The terrain in Arma gets the human touch across its entire expanse - which is why it's a much, much smaller area. Also, the flying aspect of Arma 2 is pretty... well, it leaves something to be desired. The draw distance is so short in order to get playable frame rates it's hard to fly in anything resembling a realistic manner, and if you do fly in a realistic manner regardless of not being able to see your targets you spend half your time off the map. I think including fleshing out the part of Turkey that's currently in the map (at least) would be useful. That way US aircraft could be based in Turkey and have to cross the Black Sea to get to Russia/Georgia, which would burn a fair bit of fuel. -
Airfield Proximity Threat and Neutral Countries
nomdeplume replied to crazyeddie's topic in User Created Missions General
Speed is 100% correct. In addition even if the unit is armed, if you set its ROE to 'hold fire' or 'return fire' it won't initiate hostilities with anyone. If it's also invisible to AI, nobody else will initiate hostilities against it. It will therefore behave like a neutral unit. -
...and rudder, which is easy to forget.
-
Ctrl+Z increases time compression, Shift+Z resets it to 1x, Alt+Z reduces it. I think. It's definitely those keys but I'm only 99% sure I got their functions right.
-
BS2/infantry units wont show up in game
nomdeplume replied to maxmax's topic in User Created Missions General
Some fishy guy reported there's a hotfix for what I'm assuming is this issue. -
Logs would be helpful, including the actual fault message - normally you can get it to give you information about the module it faulted in which may be useful to people familiar with these things. Also - check C:\Users\yourusername\Saved Games\DCS BlackShark 2\Logs and see if there's any files there. If so, delete them, then start the game and do something that causes a crash (e.g. load a mission from editor and try to fly it). After it crashes you should find some new files in that folder. Zip them up and attach them to a post here (use the 'Go Avanced' button to get options for attaching files).
-
Please go the "Open Beta" route next time.
nomdeplume replied to PeterP's topic in DCS: Ka-50 Black Shark
Also from my observations, preparing an open beta release is no less of a challenge than preparing a non-beta release, so I don't think you'd really see any change in the frequency of updates. Maybe if they had an easy way for us to sync the latest build and they felt comfortable with breaking it frequently -- perhaps by encouraging everyone to also have a stable version installed so if you just want to play the damned thing you can -- it might work better. On the other hand, a lot of people wouldn't bother with builds that were frequently broken in various ways, and they already have quite a lot of beta testers; so a lot of issues would still slip through. True "betas" aren't really something most people would want to do deal with. Google's lulled everyone into a false sense of security, I think... -
^^ Hehe. :D You don't need ground power, and I'd be surprised if it was commonly used. The batteries are sufficient for the fuel pumps and you can get the APU up and then once your engines are up to normal power they'll supply all the power you need via their generators and the inverter. With the door open and your engines off, ground crew can hear you so you just use the normal comms menu (\). However it sounds like the ground crew might be absent in some missions so if you're not getting a response it's possibly just because that mission doesn't have the needed ground vehicles to provide service.
-
Yes, almost. Just bare in mind that "LESS THAN" and "MORE THAN" are quite literally that, as opposed to "less than or equal to" and "more than or equal to". Or if you're familiar with the commonly used notation in many programming languages, the conditions implemented are < and > as opposed to <= and >=. So, you probably want to do FLAG30 LESS THAN 11 FLAG30 MORE THAN 10 FLAG30 LESS THAN 21 FLAG30 MORE THAN 20 in order to cover all possibilities. Otherwise if the flag gets set to e.g. 10, none of the conditions will actually match for it. Yes, that's exactly right. The 'equal to' condition will just make it a bit easier to implement.
-
BS2 Video showing off the new CBU models
nomdeplume replied to Ranger79's topic in DCS: Ka-50 Black Shark
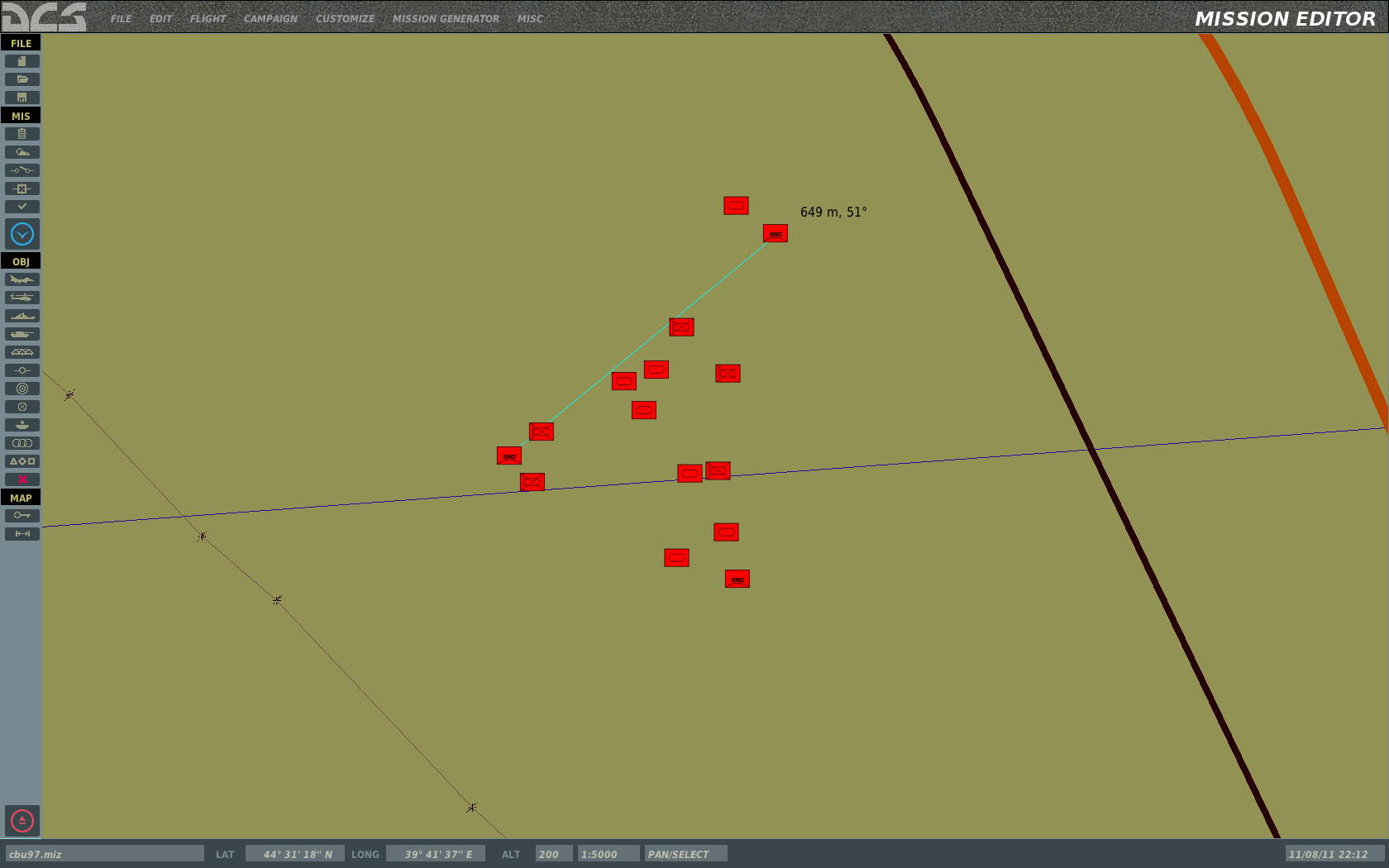
Aw you beat me to it, but mine's bigger. :P Mine's in two parts: a single CBU-97 drop with slow-motion close-ups showing the mechanism, followed by a string of 6 in real-time. Since you kind of need to watch it in high-def to see the submunitions I'll just link it rather than embed it: Video: The video description has links to the times of the actual bomb drops, for the chronically impatient. The start of the video tries to show the ground units formation, but I've also attached a screenshot of their layout in the mission editor for those who care about such things.
-
You could try hitting ctrl+scroll-lock twice to get the detailed FPS display which shows you where the renderer is spending its time. Might tell you something interesting. Then again, it might not. And it might be worth waiting for the 1.1.1.0 patch for Warthog before comparing.
-
There's a separate hover-hold button, which does activate the four AP channels but also utilises a doppler radar to try to detect movement away from the current position and correct for it. You'll get some different HUD symbology and there's an indicator on the left side of the overhead panel that lights up when hover-hold is engaged.
-
BS2 Video showing off the new CBU models
nomdeplume replied to Ranger79's topic in DCS: Ka-50 Black Shark
The first ones are CBU-103s, which are the WCMD version of the CBU-87. The new model is for the CBU-97 SFW (and the CBU-105, WCMD version thereof). Completely different weapon systems. The CBU-87's a 'conventional' cluster bomb. The overhead view of the -97's doesn't really show the skeets well at all. -
What would constitute a 'valid' sequel, then? Improvements to the (already very good) flight model? Updates to the graphics to bring it closer to modern standards? A new campaign? A larger map? Additional units and factions? Improvements to the capabilities of the mission editor? An overhaul of the AI including dynamic radio chatter and lots of settings that the mission designer can use to tailor AI behaviour to their mission? All of the above? Something else?
-
Some people have suggested you might be able to just rename the data files, but I've got both the original 'patch' files and the updated 'upgrade' files (from the torrent) and they have different MD5 checksums; so I think it'd be safer to download the whole installation again. Also, the file sizes are a bit different as well. So the data files (.bin files) have definitely been updated with the new release of the upgrade installer.
-
How to I disable the gremlin in the cockpit??
nomdeplume replied to -Ice's topic in DCS: Ka-50 Black Shark
Yes, but it's worth noting that when you engage hover hold all your autopilot channels will become enabled (well, unless the requirements aren't met, in which case they'll all be disabled :D). This includes altitude hold. While you can override the autopilot's altitude hold with sufficient collective input, life will be easier if you disable that channel and just maintain your altitude yourself. I think there's also an altitude hold lever on the collective which resets the altitude the AP wants to hold, but it's been a long long time since I've flown this so I'm pretty fuzzy on that one. Don't think I used it much. But yes, hover hold works nicely for pop-ups. I had some fun with a few Rolands last night, popping up from a hill, ducking back down if they shot at me, or sending a Vikhr their way if they didn't.