Yo-Yo
-
Posts
17758 -
Joined
-
Last visited
-
Days Won
8
Content Type
Profiles
Forums
Events
Everything posted by Yo-Yo
-
У него очень мощные помощники в системе управления, без них довольно занятно летать на нем. И это еще мы не сделали более верхний уровень АП. Это просто помощники.
-
Время бралось из рассчитанных ТС для данного боеприпаса и бралось по времени полета при стрельбе на макс дальность. Скорее всего, имеет смысл теперь сделать его с запасом, т.к. требования по производительности сейчас не такие, как тогда, когда это все затевалось.
-
Можно попроситься полетать тушкой с каким-нибудь спортсменом. Тогда на отрицательные перегрузки в симе надолго выработается условный рефлекс. И даже может быть рефлюкс.
-
Ну можно поиграться с гражданским (стрелять не будет, конечно, но можно пу-пу-пу самому издавать :)), он сильно легче. Полноценно, а не хаком изменить тип самолета - это, повторюсь, не так просто, как две строчки. Иначе у нас было бы намного больше подтипов.
-
А в каких миссиях вам нужна полная заправка? Проще поиграть с ней, оставив в баках только на возврат домой и саму миссию после сброса подвесных баков. там вы не меньше сэкономите. И потом, новый вариант самолета - это далеко не пара строк кода.
-
Спасибо! Наши стандарты вы знаете.
-
Наверное нет. Это же не амазон, который по мотору? Но даже разные мануалы - это только малая часть того, что нужно, хотя аэродинамику мы вроде научились хорошо дуть.
-
Да, не увидел спойлера на телефоне. А находить да, трудно, потому что их раскидало еще хуже, чем немецкие, плюс языковой барьер
-
Так а где оно есть?
-
Сначала надо будет понять, где ИЛС у Хеллкета и как его включить.
-
Если все будет совсем плохо, видимо, придется как-то выносить, как на Ми-8 указатели АП.
-
Но ее нельзя назвать и GS, т.к. она ей является лишь при горизонтальном полете. И не такое это уж секретное знание. как только в миссии появляется ветер достаточно существенный, на странности этой цифирки можно сразу обратить внимание.
-
Как-то взаимодействует. В статической модели атмосферы - замедляется у поверхности. В динамической еще и поворачивается. Если имеется в виду рельеф, леса, застройка - пока нет, потому что задача нетривиальная и, и по оценкам, требует немаленьких затрат на вычисления в реальном времени, доработку карт и т.п.
-
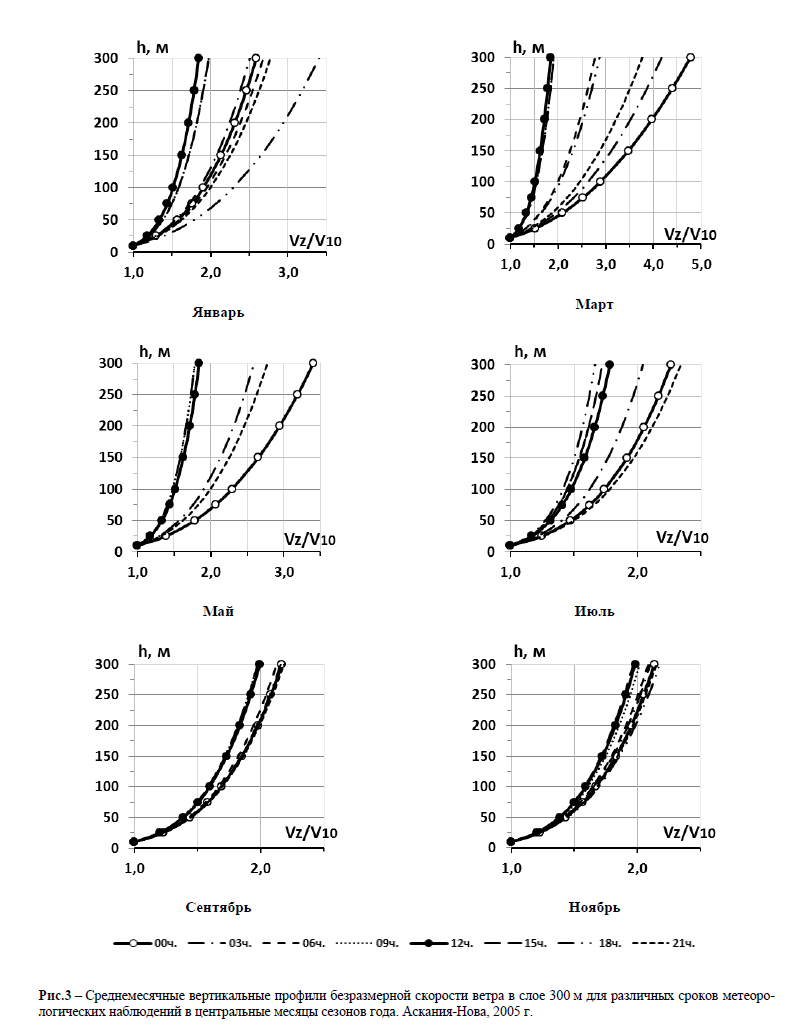
Вы сами-то поняли, что за график привели? Мы обсуждаем эпюру от 0 до 500 м, а на вашем графике этому участку соответствуют два значка с одинаковыми короткими засечками. Из этого, как я понял, вы делаете вывод, что ветер не меняется... Забывая, что этому обозначению соответствует диапазон 3-7 kts, Т.е. больше чем двукратное изменение ветра вполне впишется в эти обозначения. Т.е. у вашей "линейки" слегка великовата цена деления. И вообще, практическая ценность вашего поста нулевая, если не отрицательная. Вы опять навалили кучу эпитетов с оценкой морального и профессионального облика разработчиков, но ни разу не привели ни одного вменяемого довода, подкрепленного чем-то бОльшим, чем ваши хотелки и словарным запасом гопника ("колотить понты"). Почему так - ну потому что оспорить Матвеева у вас не получится, как не получится и оспорить тот факт, что ветер ОБЯЗАТЕЛЬНО замедляется в приземном слое, если его направление поворачивается. Ну просто потому, что это чистая механика движения воздуха в градиенте давления, а не средняя температура. Да, количественно это зависит от шероховатости поверхности, в частности, но не настолько, чтобы это существенно отличалось от средней кривой. Возвращаясь от содержания к форме, думаю, что манера, в которой построены ваши посты, уже впрямую нарушает некоторые правила форума, поэтому дальнейшая дискуссия с вами для меня закончена. В заключение, касаясь вашего изящного хода про среднюю температуру по больнице, привожу опять же усредненные, но на значительно меньших промежутках времени, наборы данных, снятых в разное время суток и года. Надеюсь, что теперь всем будет понятно, для чего ее увеличивают на высоте именно в два раза. null

-
In this case I would not argue..
-
This handicaps one can make himself just changing the fuel quantity Last few months I participated in AI improvements and if I have the AI of the same type and with the same fuel weight, I ended in stall-mate turns more than in 90% of fights.
-

So much excess thrust for the enemy in dogfight?
Yo-Yo replied to loscsaba86's topic in Flight Dynamics
Please do not use speculations and rumors of different kinds. -
The question is, how it will be considered "problematic", because the statements like "I feel the plane X has too much energy" or "everybody knows that AI plane YY is unrealistic in turns" will not be acceptable. Just now I tested AI Jug with fuel by default, 1000 lb of bombs and external tank (that all was jettisoned as AI started to fight ), and the fight was over in 2 minutes by shooting from dead 6. I could not see a "Spitfire" before me.
-
Please show the track(s), so we could measure this "unrealistic" climb. "It's also well documented" sounds like "everybody knows this well-known fact" that widely used to push a fake By the way, yesterday I climbed straight with AI Spit programming to fastest climb in ME for a test, and we got the same altitude at 5000 m at the same speed and place plus-minus my stick imperefection in G. So, you have only to try Mustangs and Jugs yourself.
-
У вас гораздо лучше получается переходить на личности и давать оценки, чем изучать матчасть вверенного вам симулятора. Это ничего... встречается время от времени. Хорошо, правильный ответ: Такой инструмент есть, называется СТРОКА СОСТОЯНИЯ, которая вызывается внизу экрана. А на ней есть скорость, которая переключается между IAS и TAS (так для экономии места было исторически сделано). А на самом деле, как давно уже мы честно признали, обозначения TAS не соответствуют общепринятому, но так повелось исторически и поэтому решили ничего не менять, потому что места есть только на три буквы. В действительности, это скорость объекта в мировой системе координат. Дальше просто - ставим ветер 30 м/с на 10 м встречный вдоль полосы и летим на самолетике с четко выставленным режимом двигателя с постоянной скоростью и постоянной высотой метров в 10-20 над полосой Держим режим сколько можем, не менее 10 с. Потом проигрывваем трек и смотрим разницу между IAS b TAS,которое с ветром уже и не TAS вовсе, а в случае горизонтального полета ground speed. Затем все то же повторяем, установив на 2000 м ветер в 50 м/с,нам не жалко. Наслаждаемся результатом. (Зачем я все это сам проделал, я же вижу в коде, что в расчет никаким образом не идет скорость ветра с 2000 м... Догонит ли в воздухе или шалишь Летучая кошка летучую мышь, Собака летучая кошку летучую. Зачем я себя этой глупостью мучаю... )
-
А какие бы вы сами могли предложить вместе с методикой эксперимента? Их есть у нас, даже экспорт не надо подключать.
-
Вопрос к разработчикам Таквью, видимо?
-
Я оставлю за скобками лестные эпитеты ("кренделя", "гении метеорологии"), которыми воспользовался автор сего поста, чтобы оценить нашу скромную работу, но может быть вы подскажете, каким эпитетом по достоинству оценить исследовательскую работу автора поста, который голословно заявил, что выставленное на 2000 м значение скорости ветра как-то влияет на скорость ветра на высоте 50-100 м "а может и ниже", хотя в реальности она не влияет никак?
-
Я думаю, что чувство такта также должно быть и у людей, проводящих занятия. Это я к "поверхностно изучившему". Если бы вы внимательно посмотрели на параметры, которые задаются в СТАТИЧЕСКОЙ погоде (мы же ее обсуждаем? ) , то вы бы не стали советовать что-то прочитать об изменении направления ветра в сторону градиента давления, потому что в условиях отсутствия в модели вообще такого понятия, как "барические системы", никакого градиента давления в принципе нет, и ничего никуда повернуть не получится, даже если очень захотеть и сильно требовать от разработчиков. Однако, в динамической модели погоды в DCS такой поворот ("хвала Кориолису", а также rot/div/grad) уже много-много лет присутствует, поскольку там как раз градиент давления существует как класс. Поэтому совет про него прочитать запоздал так лет на 15. Теперь про степь, день, ночь и прочие факторы... В качестве Священного Писания берем не учебник для пилотов, который не будем оспаривать, поскольку он преследует другие цели (как взаимодействовать с атмосферой в симуляции с БЕСКОНЕЧНЫМИ ресурсами моделирования) , а берем умную книгу, в которой, в частности, приводятся и результаты усредненных точных измерений скоростей ветра на разных высотах. Поскольку общая статическая модель атмосферы в DCS подразумевает единые метеорологические параметры в пределах всей карты, нас заинтересует такая цитата из этой умной книги: "Хотя приведенный профиль скорости ветра на малых высотах и является типичным по форме, но нужно иметь в виду, что все характеристики таких профилей в очень сильной степени зависят от метеорологических условий в приземном слое. Существует большое число формул для аналитического расчета этого профиля. Все эти формулы требуют знания различных параметров, зависящих от метеоусловий. Очевидно, что такого рода формулы непригодны для общей оценки влияния ветра на динамику самолета, который непрерывно проходит через районы с изменяющимися метоусловиями. Для решения этой задачи нужны осредненные статистические характеристики ветра на малых высотах, полученные в результате обработки экспериментальных данных." Точка, цитата закончена. Теперь посмотрим, а так ли уж велики эти изменения формы эпюры скорости ветра. В этой же умной книге есть усредненные за год наблюдений эпюры 0-500 метров - среднесуточная , ночная и дневная. Если брать то самое отношение ветра на 10 м и 500 м, то для дневной это составит примерно 1.6, для ночной 3.2, а для среднесуточной - 2.2 (теперь понятно для чего силу ветра увеличивают в 2 раза?). Таким образом, если даже пренебречь временем суток, о чем предусмотрительно напомнил преподаватель, то разница составит что-то около 30%. "Ужас-ужас", - сейчас воскликнут некоторые. Да, ужас, если речь идет о налогах или какой другой детерминированной величине, но все дело в том, что эти величины для УСРЕДНЕННЫХ очень случайных зависимостей . А для любой усредненной величины существет не только ее матожидание, которой мы оперируем, но и дисперсия. Что означает, что разброс реальных отношений скоростей ветра на 10 и 500 метрах легко скрадет эти 30% матожидания, если рассматривать конкретную эпюру здесь и сейчас. Что касается требования "разблокировать скорости ветра на 10 и 500м", то возникает вопрос: а зачем (или как сейчас все повадились говорить - чтобы что?). Чтобы сделать их отношение 1? А где вы такое вообще видели, например? Даже в фундаментальном труде Матвеева, на который в обязательном порядке ссылается упомянутая выше умная книга, вы такого не найдете. А больше 2, я понял, вам и не хочется совсем. Ну и напоследок про степь да степь кругом... Нет в DCS даже в статической модели кругом не степь, и в горах эпюра ветра рассчитывается уже существенно иначе. P.S. Для читателей поста, кто не совсем понял пассаж про матожидание и дисперсию, приведу простой пример из жизни случайных чисел. Стреляем из пушки с заданным углом возвышения. В таблицах стрельбы указана дальность, допустим, 1000 м и разброс по дальности для 50% выстрелов +-200 м. Ставим угол возвышения для 1000м , стреляем, получаем 1200 разрыв, ставим по таблице 1200, получаем 1000. Можно посчитать даже вероятность такого события, но она достаточно велика. именно поэтому для вилки у артиллеристов берется шаг по дальности, заведомо превышающий разброс.
-
It is quite uncertain who is in charge in this case, but my opinion is that AI must be as close to real thing (especially if all necessary information is available) to be a fair counterpart for other planes.