Rapti
-
Posts
163 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Rapti
-
such a great Video - cngrats!
-
it could be, that yout stepper is not able to rotate the full 360°. Take a look at the following video:
-

MFD exported viewport brightness & contrast - critical on TGP
Rapti replied to ZACHI's topic in Multi-Display Bugs
It works in a mixed reality cockpit to brighten up the screens in the physical cockpit. I just tried it. Gesendet von meinem SM-S928B mit Tapatalk -
To be sure, you must also render the CMSC display on a monitor, otherwise it will not be shown on your external display. We had this problem with our simulator. We hide the cockpit, but we still have to render the CMSC display on a monitor (in our case, the monitor for the instrument panel). It is sufficient if the size is 1x1 pixel. If this is not done, the external display will not show anything.
-
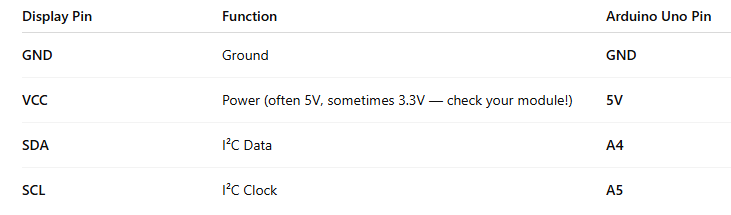
Have you ever done a test independently of DCS BIOS? With an example sketch for the display? Maybe the display is defective?
-
The simplest approach would be to dispense with Arduinos and DCS BIOS and control everything with Leo Bodnar boards. These behave like game controller boards. The outputs can be assigned directly in DCS under Controls. The disadvantage is that they are only outputs and not LEDs, displays, or servo controls. For most people, however, a simple button box is sufficient. Another option would be the hardware from jahelisimulator https://www.jahelisimulator.com/shop/product-category/simulator-electronics/ioboard/ Here, different profiles can be created for different aircraft types.
-
Yes, I use Helios to have all the gauges and DDI's exported.
-
null

-
Most people used a monitor for this instrument cluster including me. InstCluster.mp4
-
MFD exported viewport brightness & contrast - critical on TGP
Rapti replied to ZACHI's topic in Multi-Display Bugs
Will the reshade mod also work if you use VR and a mixed reality cockpit? Gesendet von meinem SM-S928B mit Tapatalk -
OK ChatGPT had the solution: How to fix it You need to give each object a unique name. For example: DcsBios::LED ltdRSwLed(FA_18C_hornet_LTD_R_SW_AM, 7); // LED output DcsBios::Switch2Pos ltdRSwSwitch("LTD_R_SW", 8); // switch input Now you have one LED object (ltdRSwLed) and one switch object (ltdRSwSwitch), no conflict.
-
Hello everyone, I have a question about the laser arm switch in the F-18 This switch is actually a magnetic switch. Since I am using a normal (ON) - OFF switch for this, I would like to display the status of the switch via an LED. So when the switch is in the armed position in the simulator, the LED should light up, even though my physical switch is back in the OFF position. I already implemented this a few years ago in a button box. There was the DCS BIOS prompt: DcsBios::LED ltdRArm(0x74c4, 0x0100, PIN); This call no longer exists in the current DCS BIOS version from Skunkworks! Does anyone have any idea how I can solve this? There is basically the prompt: DcsBios::LED ltdRSw(FA_18C_hornet_LTD_R_SW_AM, PIN); However, I cannot use this in the same sketch because it addresses the same function.
-
Interesting project! Are the two Arduinos automatically recognized as two different Windows game controllers? Until now, I have been using Leo Bodnar boards. However, these are quite a bit more expensive than the Arduino Leonardo boards...
-
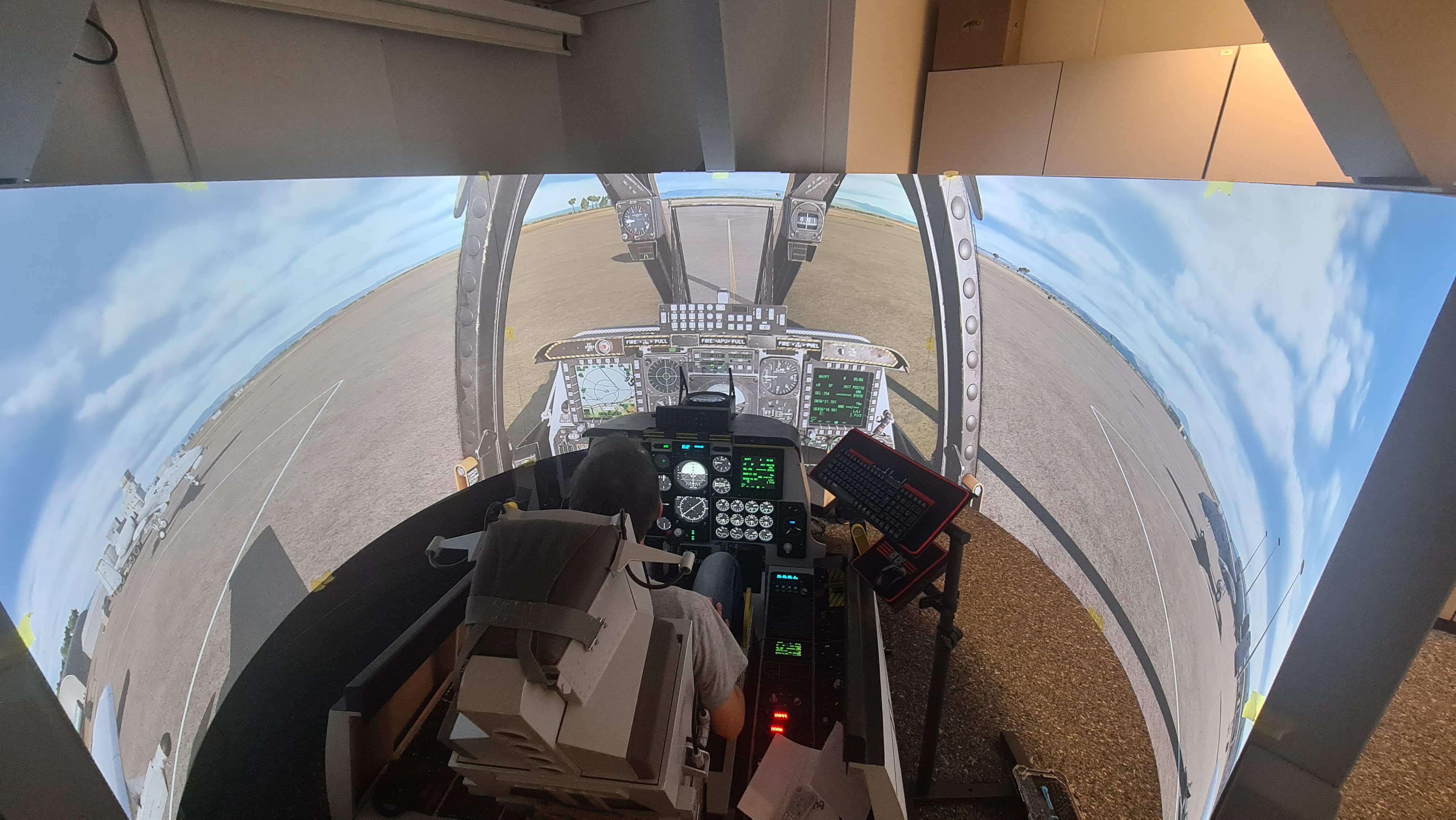
I would love to have this on our A10 simpit. We have a 270° screen. In the A-10, it would not be necessary to look at your 6. The 270° would be good enough... Gesendet von meinem SM-S928B mit Tapatalk
-
I got a similar problem, I cant move the mousecursor to to bottom right. It stops before I reach the button. Did you find a solution?
-
so true!
-
This would be so great. Thanks. Gesendet von meinem SM-S928B mit Tapatalk
-
great job!!! Would it be possible to get the kneeboard from you for masking the cockpit?
-
My use case is as follows: We use almost 25 arduinos (nano, uno, mega) in our A-10 pit, We always have the problem that after a certain number of arduinos running on powered USB hubs, the last arduinos are no longer recognized. My idea would be to operate most of the panels with the "normal" arduinos and operate the remaining say 5 panels using ESP32. would this mixed operation work?
-
any ideas on this topic?
-
Can I mix this with a "normal" DCS-BIOS / Arduino setup?
-
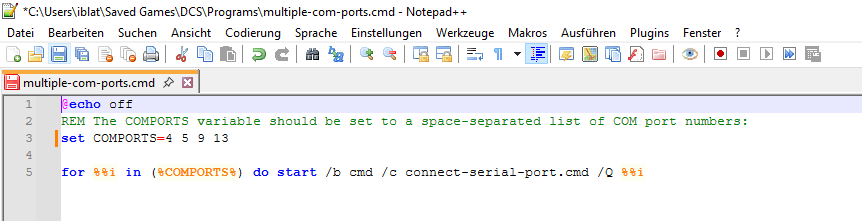
mhh that's strange. Do you possibly have no authorization in Windows? I simply open the file with Notepad++
-
You have to start the ports in any case. You do not have to do this individually, but you can edit the file multiple-com-ports.cmd with notepad++ and enter your ports there. This way you only have to execute this one cmd file null
-
Looks great! Gesendet von meinem SM-S928B mit Tapatalk
-
Yes its quite challenging to run it all. We also had a steep leaning courve.