tavarish palkovnik
-
Posts
476 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by tavarish palkovnik
-
But if Su-27 is at 12km and задання высота is 10,6km then G signal shows to pilot to go down. If it would be opposite, задання высота above текущая высота, G would be with arrow up. At least I think so
-
If I read it correctly, Су-27, текущая скорость 1060км/ч, текущая высота 12000м, задання высота 10600м, высота цели 10600-3000=7600м Here also if target speed is same 295m/s, approximate distances can be found with 4G and 16G 23*295+18000=25km 56*295+41500=58km Rocket without using reserve in calculation would have PPS Rdmaks1 63km

-
I don't know from where you got this 5000m but it doesn't change things a lot, if any. But I'm looking in mark Drmax2 which is on 20km distance. That will match approximately (with perception that target speed is same or about 230m/s) if I apply constant 16G on rocket ! 16G hmmm ... 1G for leveled flight, +3G as reserve for steering is 4G and rest is 12G what might be reserve for maneuvers of target. Do you have some other similar ILS/IPV view, for ER or R whatever
-
vi=840m/s ... H=6300m and let's put it up to 0,8M -> 45*230+28500=cca 39000m ... +3G included
-
Forgot to say....+3G included during all 60 seconds
-
It's hard to follow you Of course there are many factors influencing on launching distance, but I'm most interested in pure kinematic possibilities of rockets, R-27ER for example. We all know it has very powerfull motor and rocket itself is very potent, simply it is. Yes, these what I will show are individual calculations, but also there are paper works which very much confirm that these calculations are very much in line with reality Hypotethic case, bandits took over Tu-144 and fly with its legal velocity 2125km/h at high altitude and super pilot in Mig decided to knock it down, risking his life at very end limits Mig-29 can reach 18km and it can speed up to 2500km/h what is also maximal launching velocity for R-27. Yes it has just nearly empty tanks but he's taking his chances. Theoretical but also practical case. What is behind 130km...maximal of maximal for R-27ER, theoretical maximum Rocket's maximal theoretical launching altitude is 20km and theoretical maximal launching velocity is 2500km/h and if there are such targets and such carrier of rockets, theoretically it can be launched at distance of 130km. Numbers prove it, simply as that
-
This is diagram I was talking about, 40km and 52km at 10 and 15km, 250m/s … with +3G it is unachievable. Any idea or thoughts what could be behind?
-
I don’t know, perhaps when stated R-27 they thought at R-27 family R-27R neither in theory can reach such distance, but 90km as maximal distance in ZPS is reality although for very end limits, and in practice most likely never used or will be ever used
-
For R-27ER ! At top high limits. R-27R with same top high limits is at 90km. 20km ; 2,3M (680m/s) vi=vc=vk ; N=4 -> 54 seconds ; x=~55500m ; 54*680+55500=~90km This at 20km is for vi=700m/s vk=~600m/s t=60sec … for sure, guaranteed
-
I will check for H-29, there are videos of H-29 launching were rocket goes in strong gorka. In any case on H-25M it is optional, with gorka or without. But to return on R-27R, this is +3G concept and when compared to diagram above (250m/s vs 195m/s) that's it However, like said there is diagram which says 40km and 52km at 10km and 15km...I missed yesterday something, writing with numbers from back of my mind, and there were lot of numbers in there. To reach 40 and 52km I applied only +2G in leveled flight...perhaps zapas peregruzke depends of altitude !? But we have at 10km PPS -> 30km (250 vs 195) +3G 34km (250 vs 250) +3G 40km (250 vs 250) +2G !? This is for 10km and 15km with +3G and +2G
-
To repeat this, because it is very interesting and there was no some reactions Запас 3 ед.п. в канале управления, this principle gave exactly same velocity profiles of R-27ER. Zones are drawn depending of altitude, sometimes velocity (lower altitudes), sometimes time in addition (far distances in PPS), sometimes available additional overload, static stability issues (higher altitudes) etc etc It fits very well, 34km PPS 13km ZPS at 10km, 23km PPS 8km ZPS at 5km, 16km PPS 5km ZPS at 1km. For rest I can just say, trust me bro It must fits, motor is very well known in everything, ballistic coefficients also, atmospheric conditions of course, and when put everything in integral with postulate of leveled flight with 3G extra load it must fit and it fits. Now question…how comes diagram from very relevant source shows that on condition vi=vc=250m/s PPS zone for R-27R at 10km is 40km and 52km at 15km. Same altitude for fighter and target.
-
Motor of R-37 came from MKB Iskra like motors of mostly all air-to-air missiles (R-33 and R-60 are exceptions plus, not sure, but seems R-40 also) Relatively fresh patent from Iskra…for me most likely concept of R-37 motor, classic dual thrust motor
-
Двухимпульсный или двухрежимный ? Most likely it is just dual thrust motor (not dual impulse) with base concept like motor of R-33 only with more expanded nozzle. Of course it has longer working gas generators, perhaps even x3 and trajectory should be full blooded горка. And with stated launch velocity 2,8M it goes very far even without dual impulse concept simply because it has muscles
-
This far end line in PPS at 50km...seems it is not because of 45 seconds (actually for sure it isn't). Rocket flies at 15 to 20km altitude to 50km distance (even over) so it should be something with radar and PARGSN
-
Actually very similar to R-27R. Same rules, same +150m/s (velocity of rocket over target) in ZPS @MA_VMF R-37M would be maybe too much because we don't know much about it, if anything
-
Winter weekend is coming…few more пуск of R-27R or some other rocket? @MA_VMF is doing some great stuff with R-33 external characteristics
-
Upper zone remained, over there is circuses although it started even in this presented, at altitudes above 15km. In limits and creating zones, beside everything, static stability of rocket also coming in algorithms plus maximal launching altitude
-
черная кривая- зона возможных пусков красная кривая- зона поражения
-
-
Of course
-
Also one for R-27R Same principles as for R-27ER of course
-
Then also effect of minimal temperature should be included when making layouts of ЗВП. This what I’ve done is for normal temperature Russian documents were always fair and presented the worst possible cases…opposite to cowboys which always exaggerate theirs Total impulse of R-27ER motor on minimal temperature decreases for some percentage (more than few), of course, compared to normal one…what has influence and ЗВП I’m sure were created for minus Good example, ПТУР Конкурс 9М113 (9К111), max range 3000m because of -50 although it goes to 3700 at +50
-
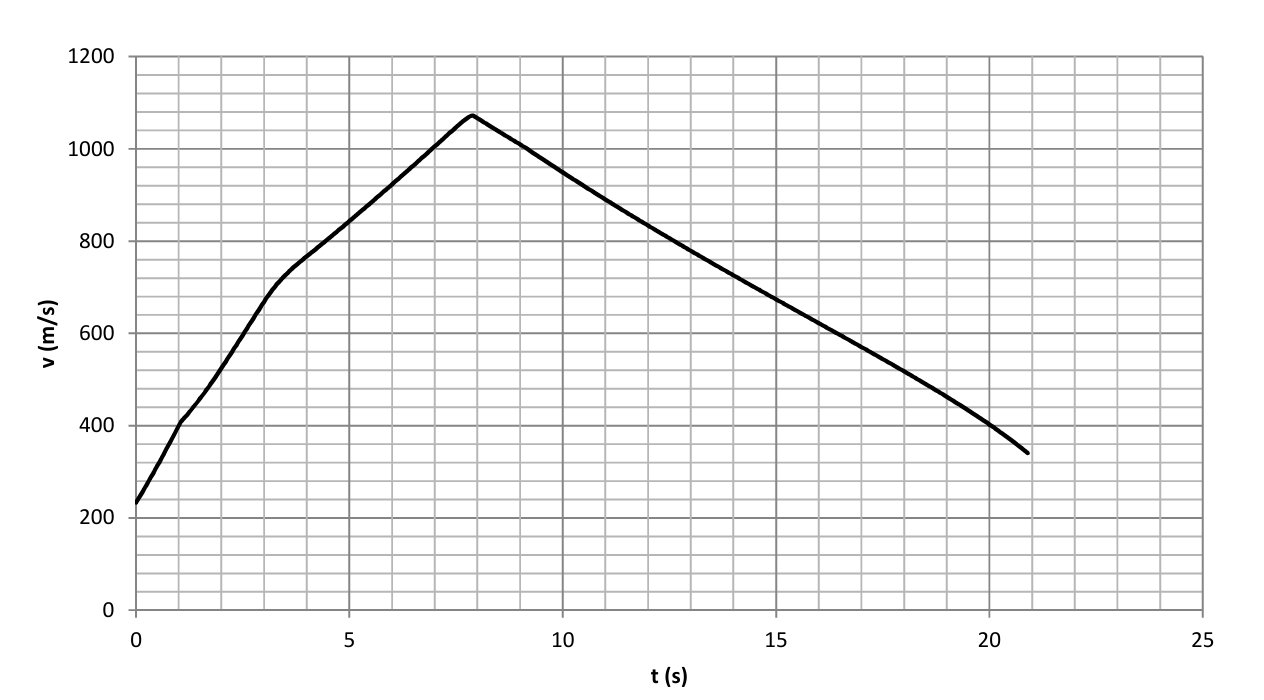
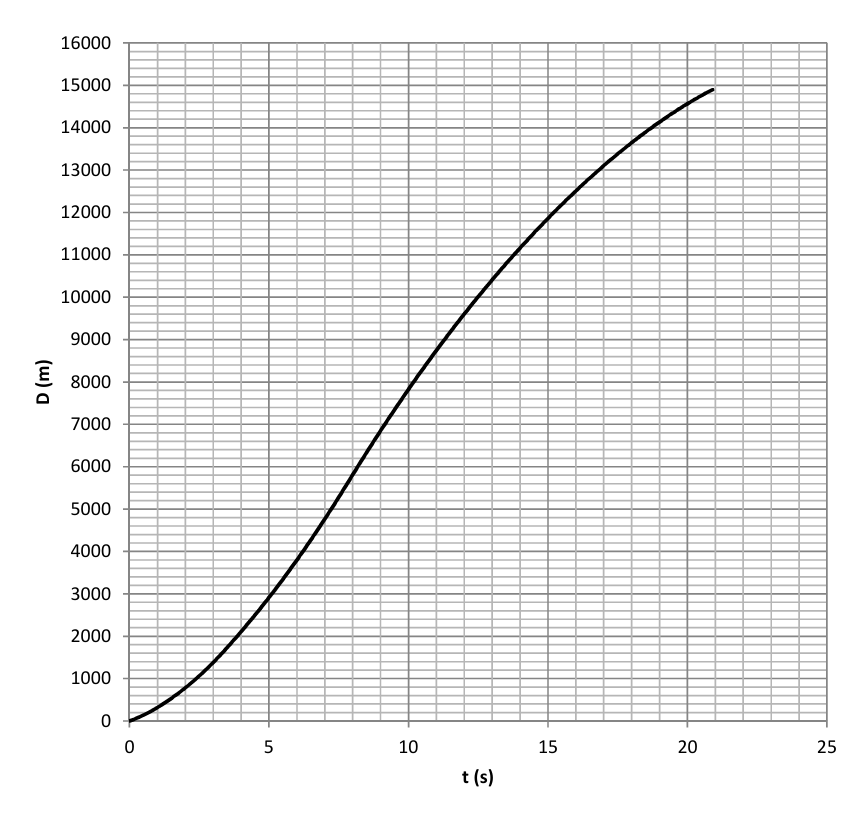
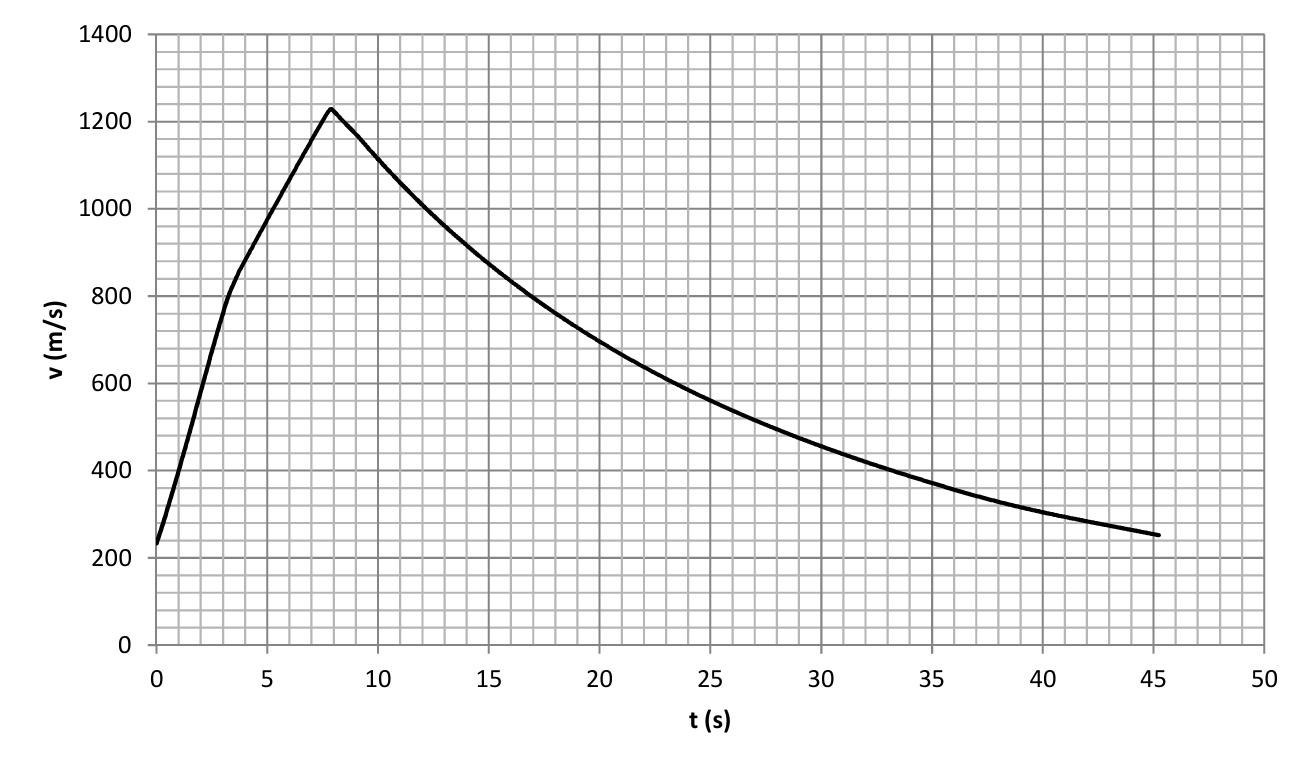
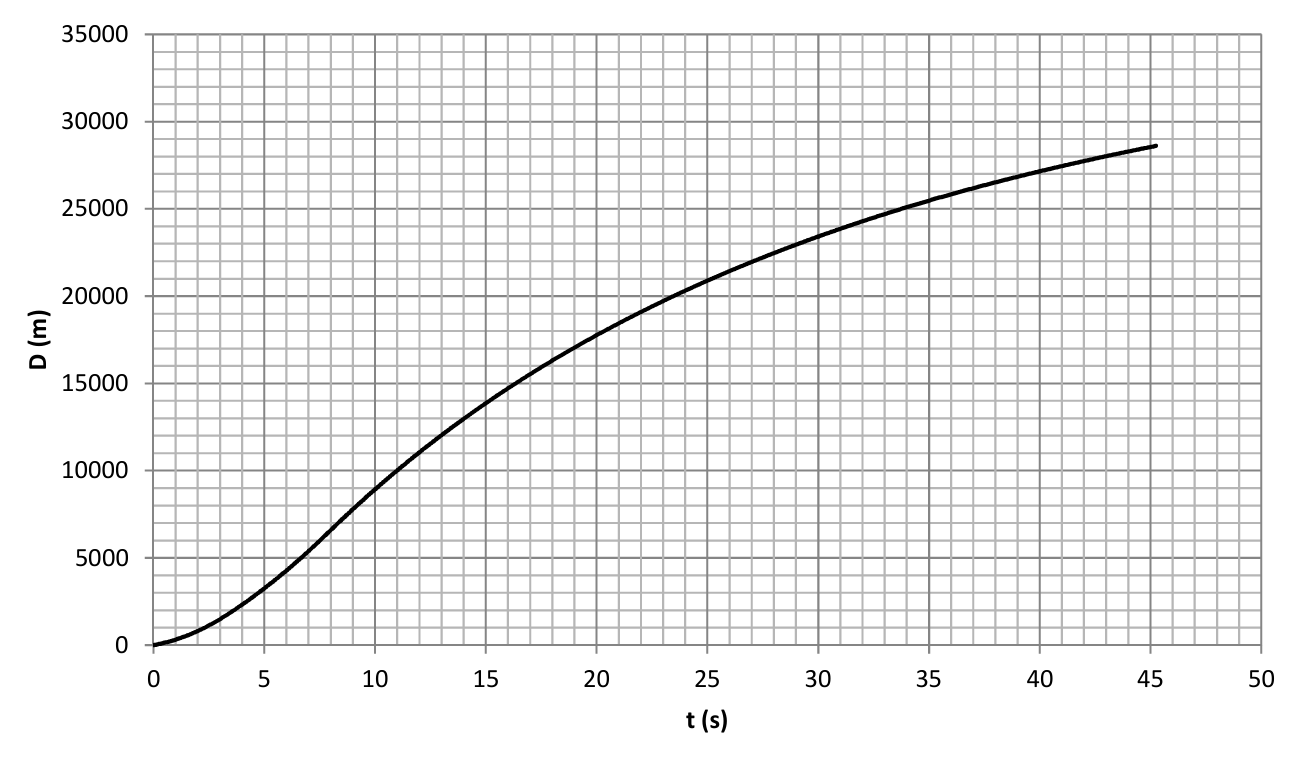
To explain what I wanted to say, and pictures are always the best way Now for sure, I think so, can be said that ЗВП are created in way that rocket’s calculated flights for creating zones are such to ensure one of criterium and that is demand for reserve of at least 3G in steering channels (запас перегрузки). Meaning…rockets in calculations are overloaded with these extra 3G. Simply, several rockets are all with same pattern This is just one of numberless cases, R-27ER with launching velocity 500m/s at altitudes from 5 to 20km with applied extra overload 3G but still in leveled and straight flight (calculation case, because straight leveled and extra overloaded flight is in contradiction with practical physics). Targets at same altitude and with same velocity And this is enough to draw curve of ЗВП in maximal. 106,7km (20km) 105,2km (19km) … 37,7km (5km) Rocket has velocity not less 500m/s (ППС пуск), it has reserved 3G, flight time is not more than 60sec But in reality if target flies straight and leveled, in direction to rocket, then rocket will not use those extra 3G At 20km altitude, difference in final velocity and distance is significant for these two flights, and on first guess it could be concluded it actually makes big difference. I thought so, but when I put numbers in picture it is a bit different Red dots are точки встречи of calculated 3G extra overloaded rocket and green dots are for 1G straight leveled trajectories. Down under differential is with tendency of zeroing, up there some differential exists as expected but not so significant. Or it is, depending of perception. My numbers showed me that at 20km it could be hit at distance of 78,6km in 56 seconds vs hit at 76,7km in 60 seconds. Two kilometers and 4 seconds…hmm…sometimes it can save head on the neck but I think it is after all negligible in this case. In any case interesting in theoretical means…and in practical means, most probably these extra 3G will be used after all from some unexpected reason in these long 60 seconds
-
It has sense, it should have such reserve but when making programming of trajectories for me normal non-overloaded data (initial basis) should be used and then depending of situation, applying overload and braking data coming from initial basis. I’m not sure is this what I wrote is understandable I know what I wanted to say but when I read it even to me is confusing
.png.94112e4c36648440310ad9cd2d1e62d7.png)
.png.2be50a67598e47fbff1b154b859b7427.png)
.png.eac448e5af599b1b5efa330288d39e34.png)