Purzel
-
Posts
305 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Purzel
-
@caponi, ich bin heute abend eh im FL-DC. Die Auflösung in DCS stimmt schon. @xfirf Das Problem ist, dass ich die Kante zum Ziehen nicht erwische, weil die DDI-Displays zu klein sind. Habe jetzt aber mal ein wenig Threads durchsucht und rumprobiert und dem Problem glaube ich auf der Spur.
-
Hi, ich habe für mein F/A-18C Cockpit drei Monitore zusätzlich zum Hauptbildschirm: Auflösung (v.l.n.r.): 1920x1080, 768x1024, 768x1024 und 600x800 Auf Monitor 4 soll das Kneeboard angezeigt werden. Es wird aber in Monitor 3 verschoben: Was muss ich in der MonitorSetup.lua eintragen, damit das Kneeboard entweder auf dem Bildschirm 1 oder auf Bildschirm 4 angezeigt wird? Gibt es dafür einen Eintrag in der MonitorSetup.lua? Aktuell schaut diese so aus: Die 700x700 Größenangaben der LEFT_ und RIGHT_MFCD Einträge sind der Tatsache geschuldet, dass ich die Displays hinter TM Cougar-Rahmen verbaut habe und die DDI's sonst abgeschnitten dargestellt würden. Ich meine, mal irgendwas zu einem Kneeboard-Eintrag gehört zu haben, diesen Eintrag suche ich... Danke Gruss Purzel

-

3D Print file repository thread for home cockpits
Purzel replied to BIGNEWY's topic in 3D Printing for DCS
You may have a look at my thingiverse-page: https://www.thingiverse.com/purzel24/designs F/A-18C Thrustmaster Cougar Replacement: https://www.thingiverse.com/thing:5923061 AOA Indexer: https://www.thingiverse.com/thing:6274425 IFEI: https://www.thingiverse.com/thing:6242816
-
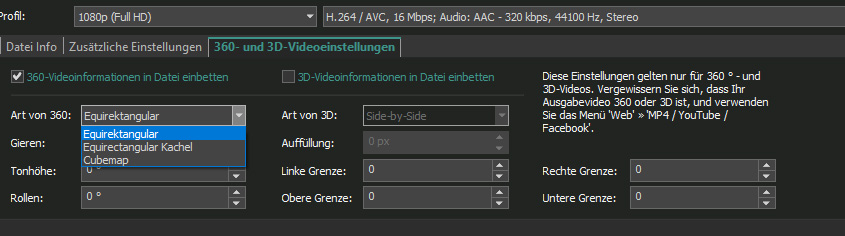
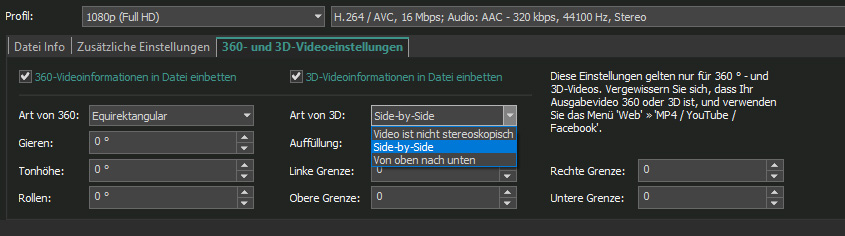
Hi pilots, I post my question here, because I think, here I'll get the best chances for an answer... Is it possible to capture a VR-video from DCS, in which the player sees my head-movement, but can change his own sight by looking arround in a 360° cockpit. Or is it only possible to do a video with only my view? Or only in 360°? The goal is to do a video, which can be viewed in a HMD-device (of course in 3D) via YouTubeVR. What kind of options do I have to set in DCS to capture correctly? (e.g. for a 360° view) What kind of settings do i have to use in a video-editing-program to save it? I'm using the free "VSDC Free Video Editor". I've tried arround with with some settings, but I can't get it work. And: The eye-distance is not correct as you can see in this video (please try with your HMD!), how do I get this done? THX in advance! Purzel
-
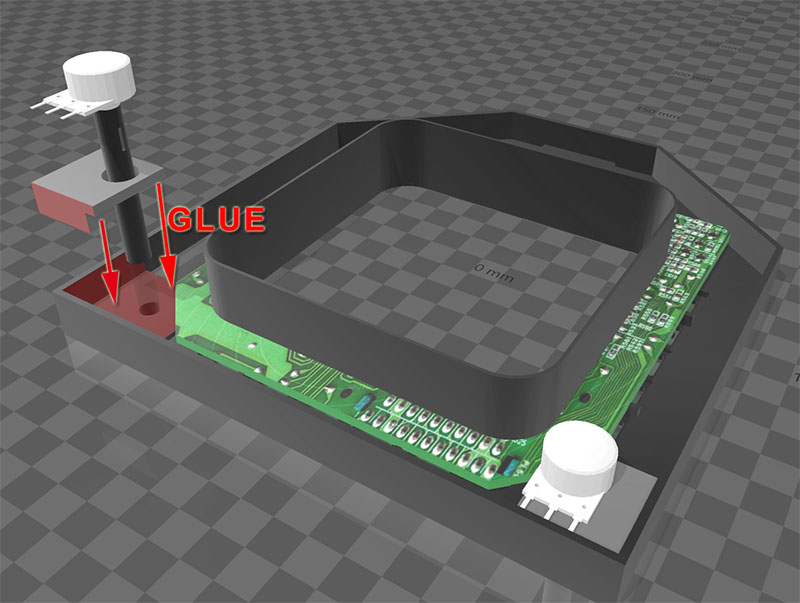
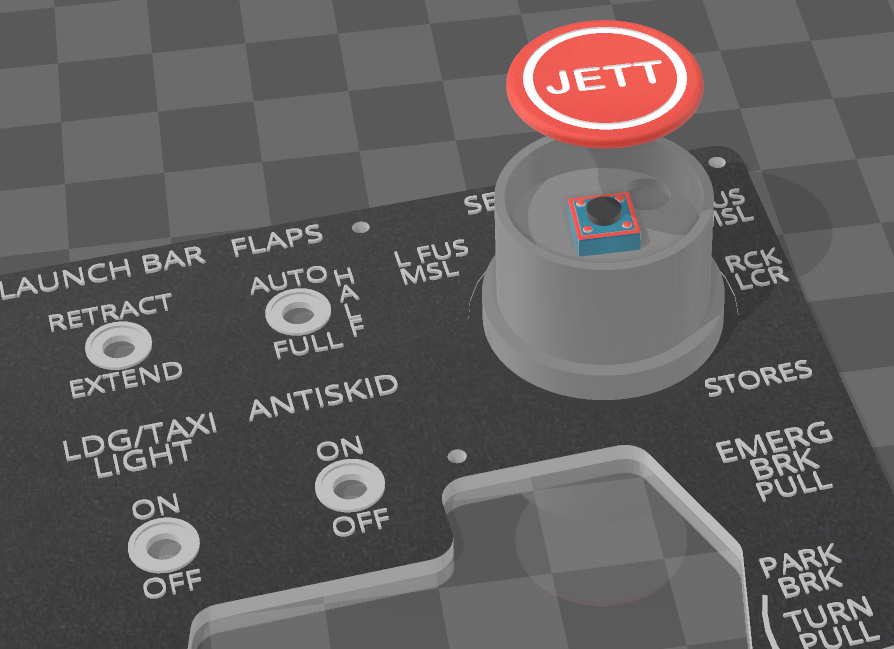
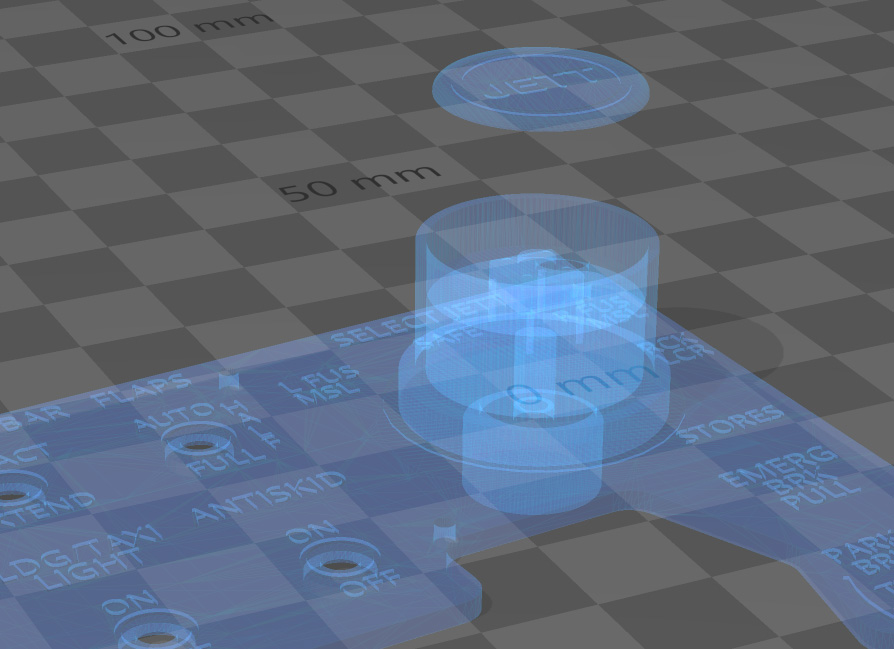
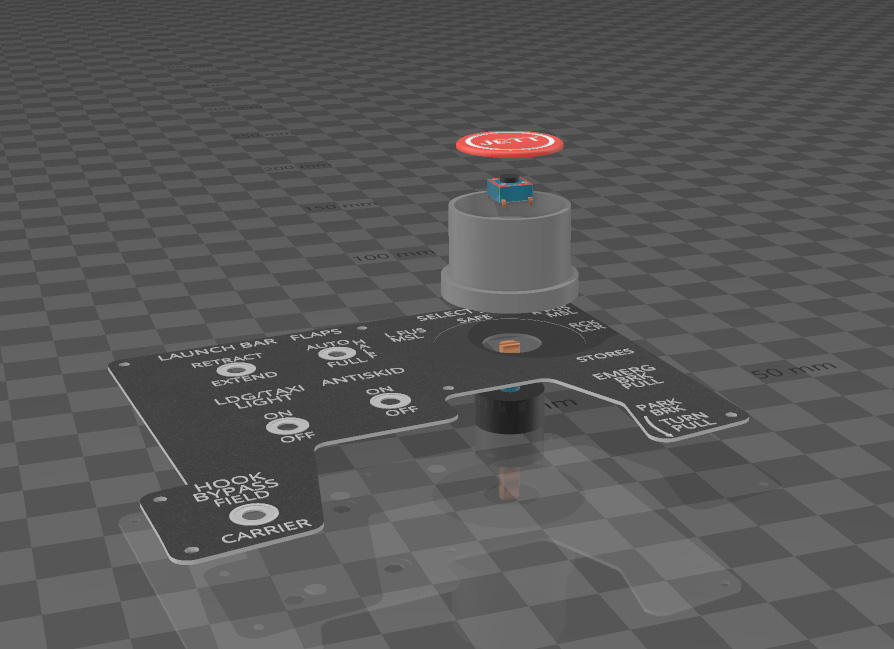
Finally I went away from the design above, which is nevertheless a great solution! @Blue73 did a great job, I really apprechiate his work! But just for some space-problems, I had to find another way. I've used the grey outer hull of the rotary-switch and glued a mini push-button into it. On top of it there's glued the red/white "JETT"-disc. The grey outer button is connected to > this < rotary-switch. Works perfectly and is way more easy to build. You just have to let the cable from the JETT-switch loose enough, so it can move with the rotary-switch. (OK, one position (clockwise from "stores"-position) is left free, but it absolutely no problem for me.) But it's a simple solution and it works. JETT-Rotary-SWITCH_small.mp4
-
@hannibal: You've got PM...
-
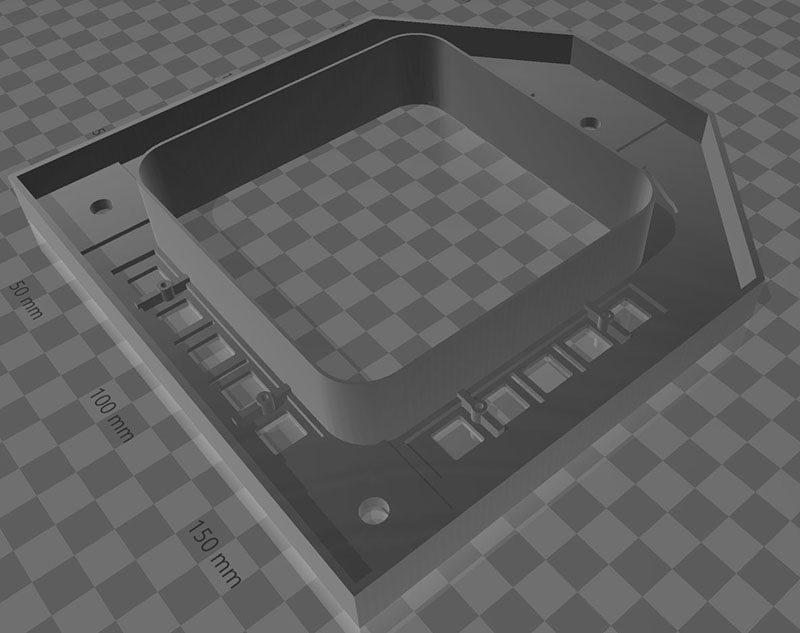
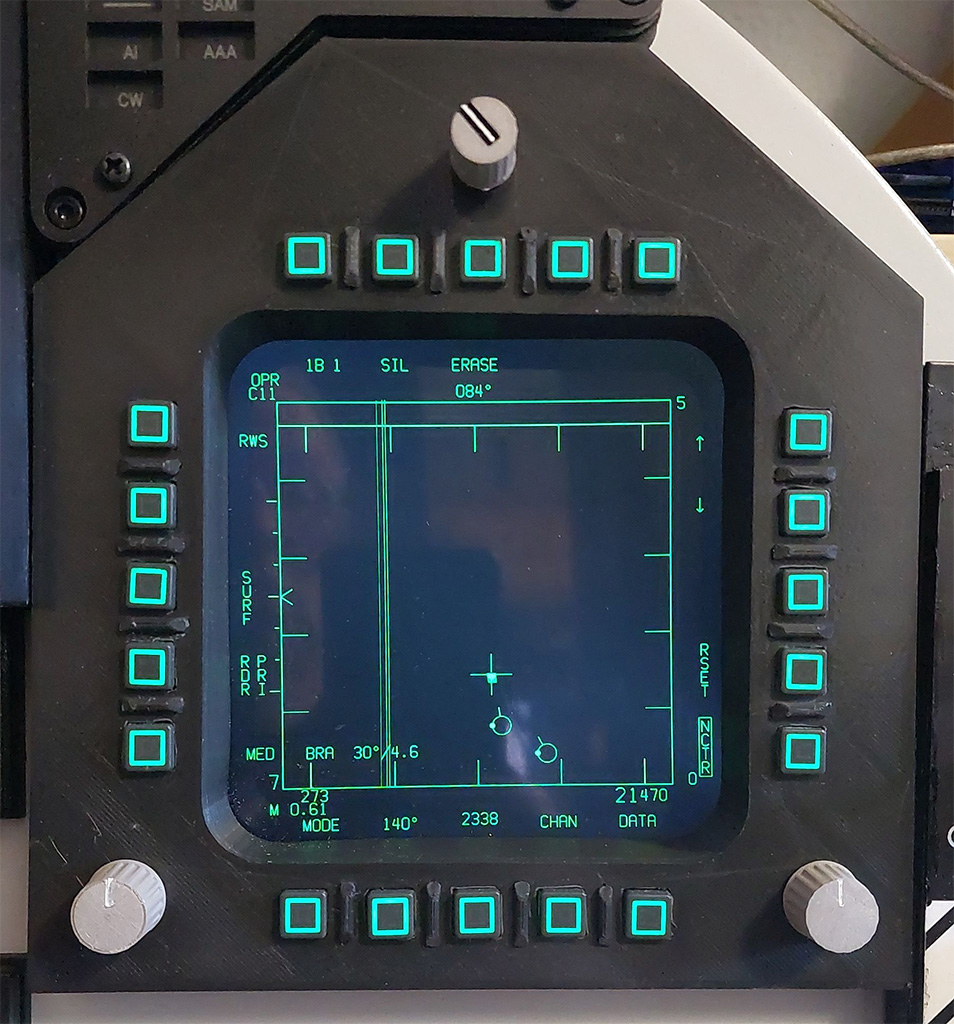
Hi pilots, I've build a replacement/conversion-kit for the Thrustmaster Cougar-frames, so you can fit your disassembled cougars stuff into a DDI-frame. https://www.thingiverse.com/thing:5923061 Feel free and use it, but read the text first! It's still not painted, just printed. It's a replacement for the Thrustmaster Cougar-frames to get an F/A-18C DDI. (Left and right DDI, AMPCD may come later) Angles/corners are designed to fit with tekcreations announciator-panels. (Others may fit too? Never tested by me.) Big shoutout to Walli, who helped me a lot! PLEASE READ the description on thingiverse.com carefully before you're damaging/destroying your TM Cougars! PLEASE LOOK at all pictures on the thingiverse-site before doing stuff, most of them are self-explaining! WHAT CAN YOU EXPECT: Disadvantage: You will loose the GAIN, SYM, BRT and CON rocker switches. (Maybe I will provide a version where you can keep them, but not now.) Advantage: It looks way more realistic and you will have the possibility to add two potentiometers (BRT and CON) and one rotary-encoder (OFF/NIGHT/DAY). You can use e.g. an arduino-board and DCSbios to get them working. It's a little bit of work, but it looks better! SIZE: 171mm x 182,5mm x 27mm Outside wall: 16mm Inside wall: 27mm PRINTING TIME: ~12-13 hrs If you like this DDI-conversion-kit, just let me know. Greets Purzel
-
Magnetschalter.... Bevor sich hier jmd. die Bude abfackelt... (Magnete können heiss werden, etc.) Kippschalter zerlegen und unten raus verlängern, danach nicht mit Magnet zurückschalten, sondern mit kleinem Servo, der den unten rausschauenden Schalter wieder zurück drückt (ähnlich wie bei einer useless box).
-
How to Arduino micro pro power-supply for potentiometer
Purzel replied to Purzel's topic in Home Cockpits
Thank you for your excellent help! Now i can go ahead and get my Deskpit done... THANK YOU ALL!
-
How to Arduino micro pro power-supply for potentiometer
Purzel replied to Purzel's topic in Home Cockpits
This is the arduino-code I'm using: // Version 2.0 ACHTUNG! - - - - BEIM HOCHLADEN DES CODES AUF DAS ARDUINO-BOARD DARF DCS-BIOS NICHT LAUFEN! #define DCSBIOS_DEFAULT_SERIAL #include "DcsBios.h" #include <Joystick.h> bool state = false; //LANDING GEAR-HANDLE LIGHTs - name of the function that is called, copy from DCS BIOS, CNTRL REF, F18 // CHANGE PIN NUMBER FOR YOUR LED //DcsBios::LED gearLever(0x7478, 0x1000, 0); // All "LED in gear handle"-codes to test DcsBios::LED landingGearHandleLt(0x7478, 0x0800, 0); //Working //DcsBios::LED gearDownlockOverrideBtn(0x7478, 0x4000, 0); //DcsBios::LED emergencyGearRotate(0x7478, 0x2000, 0); // DcsBios::LED gearSilenceBtn(0x7478, 0x8000, 0); DcsBios::LED hookLever(0x74a2, 0x0100, 1); // DcsBios::LED hookLever(0x74a2, 0x0100, 1); //Hook alternative code // Connect one outer pin of the potentiometer to the supply voltage, // the other outer pin to ground, // and the middle pin (“slider”) to an analog input pin on your Arduino board. DcsBios::PotentiometerEWMA<5, 128, 5> hudSymBrt("HUD_SYM_BRT", A9); // HUD potentiometer //DcsBios::RotaryEncoder hudSymBrt("HUD_SYM_BRT", "-3200", "+3200", 8, 9); // HUD rotary enconder alternative? //Joystick_ joystick; Joystick_ Joystick(JOYSTICK_DEFAULT_REPORT_ID,JOYSTICK_TYPE_GAMEPAD, 12, 0, // Button Count, Hat Switch Count false, false, false, // X and Y, but no Z Axis false, false, false, // No Rx, Ry, or Rz false, false, // No rudder or throttle false, false, false); // No accelerator, brake, or steering void setup() { DcsBios::setup(); // Initialize switch or light Pins // Tells if the pin is an input / output // INPUT or INPUT_PULLUP for button, OUTPUT for LED, steppers, etc. // pullup enables on board pullup resistor to prevent button floating pinMode(1, OUTPUT); // Will be used in future for Hook-LED pinMode(0, OUTPUT); // LandingGear LED pinMode(2, INPUT_PULLUP); // LandingGear Switch pinMode(3, INPUT_PULLUP); // Hook Switch pinMode(4, INPUT_PULLUP); // Unused pinMode(5, INPUT_PULLUP); // Unused pinMode(6, INPUT_PULLUP); // Unused pinMode(7, INPUT_PULLUP); // Unused pinMode(8, INPUT_PULLUP); // Unused pinMode(A9, INPUT); // HUD Poti 1 (Ohne Pullup??) pinMode(10, INPUT_PULLUP); // Unused pinMode(11, INPUT_PULLUP); // Unused // Initialize Joystick Library Joystick.begin(); } int keyState = false; void loop() { DcsBios::loop(); // LandingGear Switch TOGGLE 1 ON/ON (2) WAY, if (digitalRead(2) == LOW) // THIS TELLS WHICH PIN ON THE ARDUINO IS BEING READ // PULLED TO GROUND {Joystick.setButton(0, HIGH);} // THIS NUMBER IS THE BUTTON ON THE VIRTUAL JOYPAD SO 0 HERE EQUALS 1 ON JOYPAD else {Joystick.setButton(0, LOW);} if (digitalRead(2) == HIGH) {Joystick.setButton(1, HIGH);} else {Joystick.setButton(1, LOW);} // Hook Switch TOGGLE 1 ON/ON (2) WAY, if (digitalRead(3) == LOW) // THIS TELLS WHICH PIN ON THE ARDUINO IS BEING READ // PULLED TO GROUND {Joystick.setButton(2, HIGH);} // THIS NUMBER IS THE BUTTON ON THE VIRTUAL JOYPAD SO 0 HERE EQUALS 1 ON JOYPAD else {Joystick.setButton(2, LOW);} if (digitalRead(3) == HIGH) {Joystick.setButton(3, HIGH);} else {Joystick.setButton(3, LOW);} /* PUSHBUTTON, DIGITAL READ = ARDUINO-PIN 3 = PIN AUF ARDUINO, DER ABGEFRAGT WERDEN SOLL if (digitalRead(3) == LOW) // PIN 3 {Joystick.setButton(2, HIGH);} // DIESE NUMMER IST DIE TASTE AUF DEM VIRTUELLEN JOYPAD, ALSO IST 2 HIER GLEICH 3 AUF DEM JOYPAD else {Joystick.setButton(2, LOW);} // PUSHBUTTON, DIGITAL READ = ARDUINO-PIN 4 = PIN AUF ARDUINO, DER ABGEFRAGT WERDEN SOLL if (digitalRead(4) == LOW) // PIN 4 {Joystick.setButton(3, HIGH);} // DIESE NUMMER IST DIE TASTE AUF DEM VIRTUELLEN JOYPAD, ALSO IST 3 HIER GLEICH 4 AUF DEM JOYPAD else {Joystick.setButton(3, LOW);} } -
How to Arduino micro pro power-supply for potentiometer
Purzel replied to Purzel's topic in Home Cockpits
I've connected it as described, but it's not recognised by joy.cpl ( < type in windows search) -
Hi folks, I'm new to arduino/IDE/coding. I want to connect a 10k potentiometer to my arduino-board (micro pro) to get my "HUD-brightness" (F/A-18C) working with it. It's connected and powered via USB to my pc. In the reference they say: This is my arduino-layout: I've connected - one outer pin to GND, - the middle "slider" pin to an analog pin (A9), but I don't know where there power-supply is they mentioned. Can anyone point me the right pin? I've tried all black (Power) marked pins (exept the GND-pins), but when I turn the potentiometer, the arduinos fuse shuts off the board until I turn back the pot. Thx! Greetings Purzel
-
Unabhängig davon: Muss man nicht auch auf der Südhalbkugel anders rechnen? Da war doch mal was? Ich finds grad nicht. Evtl. sind da auch auf neuen Karten noch Fehler drin..? Auch wenn er keine Karte südlich deas Äquators hatte, könnte man mal mit dran denken, dass es da evtl. zu Diskrepanzen zw. Map-Hersteller und ED's JTAC geben könnte.
-
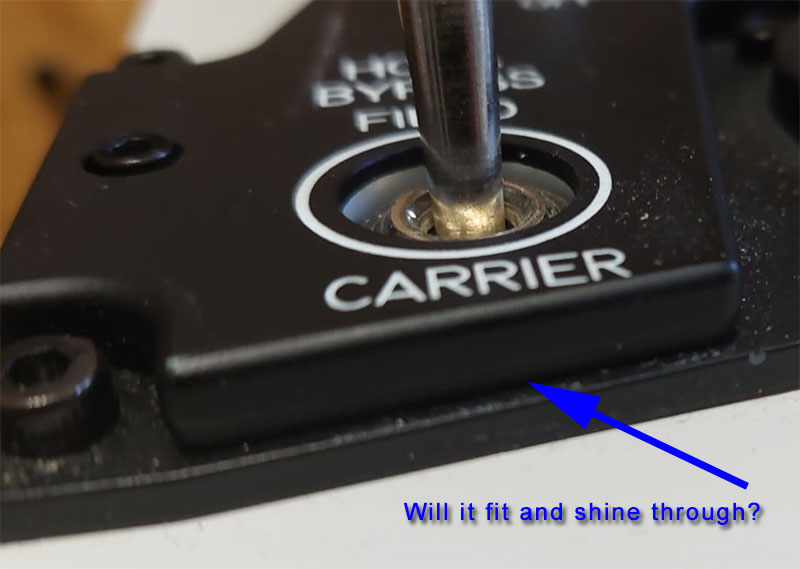
Visibilty is only for the night, so I think it would be ok. Would you be so kind and post a picture of it (night illuminated) ?
-
Hi! I'm close to finish my deskpit... so now it comes to backlighting... Did anyone use a cockpit back-lighting with electroluminescene-foil ? This kind of foils are from 0.4mm to 0.9 mm thick and: It can be cutted as you want it (yes! ) and if you buy a bigger multi-connector-foil, you can use that one with more panels, if you cut it and connect all pieces with your inverter (Inverters are selected by the size of the foil's surface - so no need for several inverters!). Which is indeed very sexy, but is it to good to be true? It should fit in between two instrument-plates The only thing you should have as a power-source is an inverter (should work with sinus-wave!) and most of the inverters are dimmable. There are 12V and 220V driven inverters (I guess in other countries 110V too). I'm using DCS-BIOS. So here are my questions: Will it be bright enough to shine through the upper plate? Did anyone used such a foil and is it possible to get this inverter dimmable via DCS-BIOS or do I have to use an ordinary potentiometer? What's your experiences? Greetings Purzel
-
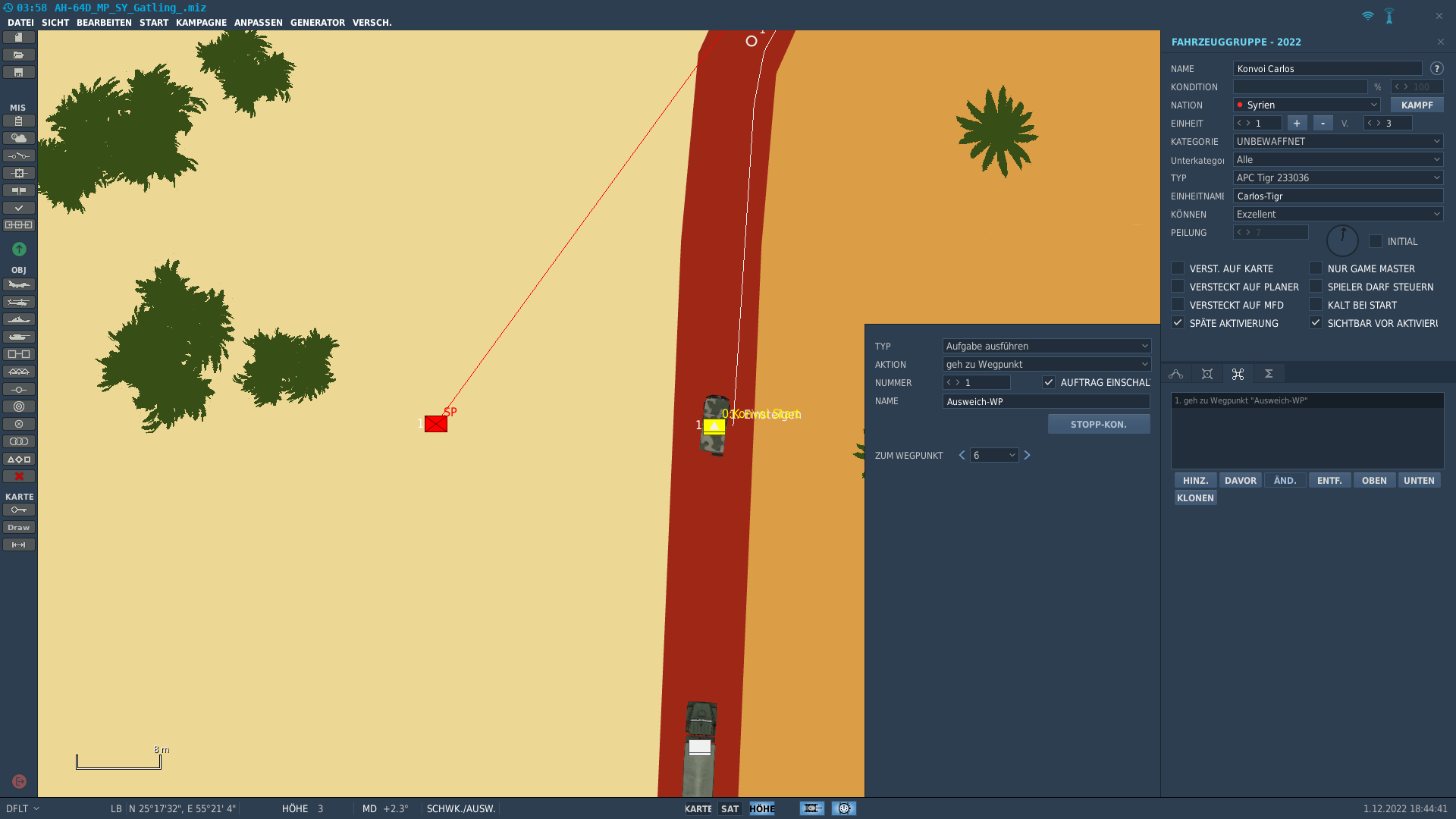
@coyote79 Danke! OK, klappt jetzt, KI fährt aber -wie Du gesagt hast- querfeldein. naja egal... habe Dir die Mission noch mal hochgeladen: AH-64D_MP_SY_Gatling.miz Viel Spaß damit.
-
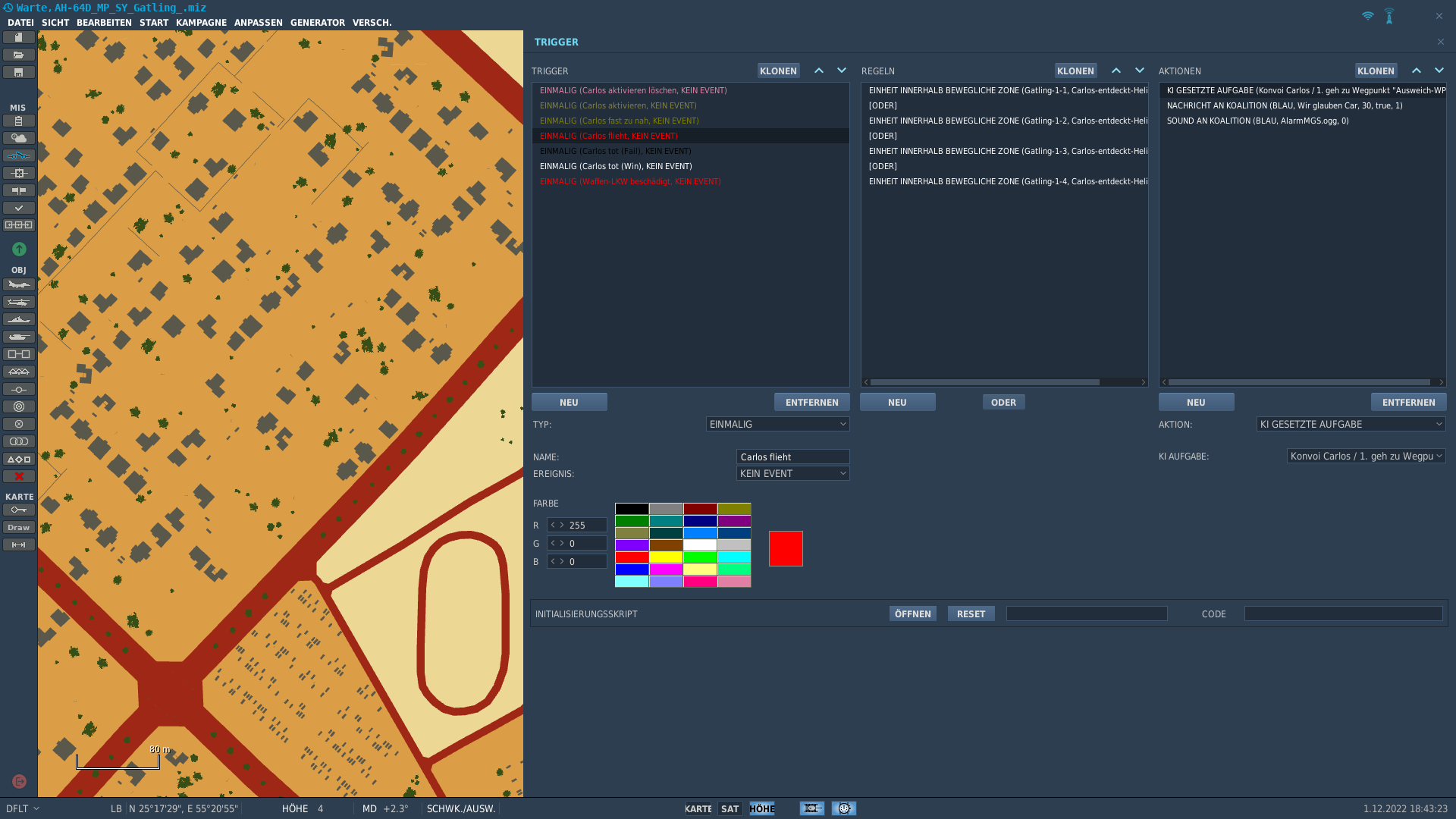
Hi, Missionsziel: Der Spieler soll mit dem Apache einen Konvoi aus der Entfernung beschatten, bis sich der Konvoi im Zielgebiet mit einer Zielperson trifft. Wenn der Spieler mit dem Apache der Fahrzeugkolonne zu nahe kommt, soll der Konvoi auf einen weiteren Wegpunkt fahren, seine Strecke quasi verlassen und den Spieler nicht ins Zielgebiet führen. Dazu habe ich dem Konvoi sieben Wegpunkte gegeben, die er auch bis zum Ende abfährt, wenn der Apache des Spielers dem Konvoi nicht zu nahe kommt. Allerdings soll der Konvoi am WP6 stehen bleiben, weil da das Treffen stattfindet. Fliegt der Spieler näher als 1500m an den Konvoi heran, kommt zunächst eine Warnung, unter 1000m gilt der Spieler als entdeckt und der Konvoi soll zum letzten WP 7 fahren. Das alles funktioniert soweit, nur dass der Konvoi bei Entdeckung einfach stehen bleibt, anstatt alle noch bevorstehenden Wegpunkte abzubrechen und direkt zum WP7 zu fahren. Die Triggerbedingungen sind wie folgt: Der Konvoi hat in dem Konvoi-Menü mit den fünf Kreisen (die aussehen wie ein Autobahnkreuz) die "Aufgabe ausführen"-Aktion auf > Gehe zu WP7. Im Trigger Einmalig > Spieler-Hubschrauber in beweglicherZone (Konvoi zugeordnet) > ruft "KI-gesetzte Aufgabe" "Geh zu (oben definierten) Wegpunkt 7" auf. Leider bleibt der Konvoi bei Auslösung einfach stehen, anstatt direkt zu WP7 zu fahren. Ich hoffe, ich habe das verständlich ausgedrückt. Weiß jemand, wie man den Konvoi dazu bringt zu WP7 zu fahren, anstatt stehen zu bleiben? nullnull
-
Kann es sein, dass ED was an der Steuerung des Apachen geschraubt hat, oder ist einfach nur mein Muskelgedächtnis mittlerweile besser geworden...? Ich habe zumindest das Gefühl, dass sich der AH-64D seit ein paar Tagen deutlich besser steuern lässt - kann es aber nicht zwingend mit dem letzten Update in Verbindung bringen, weil ich nicht jeden Tag geflogen bin.
-
Zum Missiinsstart mit "Späte Aktivierung" deaktivieren und dann per Trigger aktivieren klappt auch nicht. Also nicht so, dass die neue Gruppe nicht von Missionsbeginn an unsichtbar ist... Und es sind ja im Prinzip keine Spawnpunkte, sondern Luftfahrzeuge. Ein Verschieben würde da ja auch nix nutzen, wenn ein Hubschrauber gerade aus dem Flug weg- geportet wird.
-
Hi Folks, meine FARP ist der Ausgangspunkt für eine Flugplatz-Eroberung (mit anschliessender Verteidigung gegen anrückende Kräfte). Sobald der Flugplatz durch BLUFOR erobert wurde (das klappt, er wird von Rot auf Blau geschaltet), sollen an diesem Flugplatz auch die Spieler re-spawnen können, anstatt den weiten Weg von der FARP erneut fliegen zu müssen, da die Flugplatz-Verteidung sonst nicht möglich ist. Dazu habe ich eine neue Apache-Gruppe am Flugplatz positioniert, die aber erst zum Spawnen frei geschaltet werden soll, wenn der Flugplatz erobert ist. Aber ich bekomme es nicht gebacken, die Kondition für die neuen Flugplatz-Spawnpunkte so zu schalten, dass sie erst in der Rollen-Auswahl erscheinen, wenn der Flugplatz erobert wurde. Die sollen von Anfang an ja auch gar nicht sichtbar sein. Die FARP-Spawns würde ich dann auch noch gerne weg haben. Alternativ würde ich -wenn überhaupt möglich- auch die FARP-Spawnpunkte verschieben, so dass diese am Flugplatz erscheinen. Hat dazu jemand eine Lösung? Grüße Purzel
-
Sorry for that late answer, I went sick and wasnt able to ... No, that's not an option, because of some restrictions/limited space on my build ... Unfortunatly I only can build something with directly integrated LEDs... as nice and easy your solution is... Any other ideas? Greetings Purzel
-
Lösung: Wenn man nur einen Monitor in den Optionen einstellt, geht's...
-
Hi folks, how do you all build your backlighting LEDs behind your frontplates? This is how it looks here: Did you drill holes from downside and glued all LEDs in or is there a smarter solution? I've heard some put LED-stripes with some distance from behind, but I don't have the space for that. How many LEDs would be at least necessary for e.g. this HUD-panel? Is there any better solution? Greetings Purzel
-
Hi folks, hat irgendwer rausgefunden, wie man im Apache das Intercom mit Sprachaktivierung nutzen kann...? Wir haben so ziemlich alles probiert, um im Flug als Besatzung miteinander sprechen zu können, aber es klappt nicht. Die Mikrofon-Anzeige im Funkmenü (LSTRG + LSHIFT + TAB) ist dauer-ausgegraut. Funk und Intercom per PTT geht, nur eben nicht das Intercom, egal auf welche Stellung ich den ICS-Schalter am Panel (rechts vom Knie des Piloten) einstelle. Auch der Sens-Drahregler daneben scheint nichts zu bewirken... auch das PDF DCS_Voice_Chat_Quick_Start.pdf dazu bringt uns nicht weiter... Bin für jeden Tipp dankbar. Gruß Purzel
-
Das hängt davon ab, wie gut Deine Serverleistung ist. Das einzige, was der Server nicht rechnen muss, ist die Grafik. Alles andere läuft über den Prozessor, also welches Geschoss fliegt wohin, welcher Jet ist gerade wo, feuert der was ab, kreuzt der Flugbahnen von geschossen oder Splittern, etc., welcher Luftdruck beeinflusst welches Gebiet und die darin befindlichen Einheiten, etc. Wie ist die Mission programmiert, verschwinden oder spawnen Einheiten erst, wenn sie (nicht mehr) gebraucht werden, wie gut ist das Können der KI eingestellt, etc.


.jpg.f972ec8c97e6d7d4d0d514e5e3de6883.jpg)
.jpg.95ac8a1b50bbd09625fa19fd0e7d116d.jpg)



.jpg.cf9182563012a34e0ee41107f43c0687.jpg)