Fox One
-
Posts
447 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by Fox One
-
You probably mean "max available G for the current altitude". Are you 100% sure about that? The manual says " deplacements par G sensiblement constants au-dessus de 300kt environ ", it doesn't say this applies only if altitude is constant. Personally I interpret this "constant" as "constant in the entire flight envelope as long as speed is above 300." If at sea level the "max available G" is 9 and I pull the stick half, this will give me 4.5G. But if I'm at 40Kft altitude and the "max available G" there is 4, pulling the stick half will give me 2G. But this kind of behaviour surely can't be described as deplacements par G sensiblement constants. In fact, they are very far from constant. This type of flight control logic will give you along the entire flight envelope of the aircraft very large variations in stick displacement per G, in fact as large as an aircraft with conventional pitch control, like for example a MiG-23. What kind of fly-by-wire "smartness" is this? In the F-15 if you pull 4G at sea level and enter an Immelmann and keep the stick in precisely the same position, the aircraft will remain at 4G(+/-0.2G) as long as this is still possible, it doesn't matter how hight you climb.
-
From real aircraft flight manual: Les commandes de vol sont reglees pour avoir des deplacements par G sensiblement constants au-dessus de 300kt environ. Le manche permet donc de piloter un facteur de charge. It seems to me they are describing a classic G-command type of control there. First experiment At low altitude with full AB with neutral trim in horizontal flight with 600kts I pulled the stick until I see 4G, then kept the stick fixed in precisely the same position. During the Immelmann the G continuously decreased and over the top speed was a little above 300 and G was 2.1 That's some serious variation in stick deflection per G. If I put the stick in a position that commands 4G, shouldn't the flight control try to maintain 4G, just like it would do in an F-15 or F-16? Second experiment At low altitude in horizontal flight with about 400kts constant speed with neutral trim I roll the aircraft inverted, then let go of the stick. The flight control will create about -1.1G. As if the aircraft was expecting inverted flight to last for quite some time. This doesn't make any sense IMO. What's the point of such kind of flight control behaviour? Help pilot recreate Top Gun inverted flight scene? As long as the speed is above 300kts, shouldn't the flight control try to maintain 1G, no matter the flight conditions or aircraft position in space? Am I misinterpreting something? Maybe someone knowledgeable in Mirage 2000 could provide some answers if current simulator behaviour is right or wrong.
-
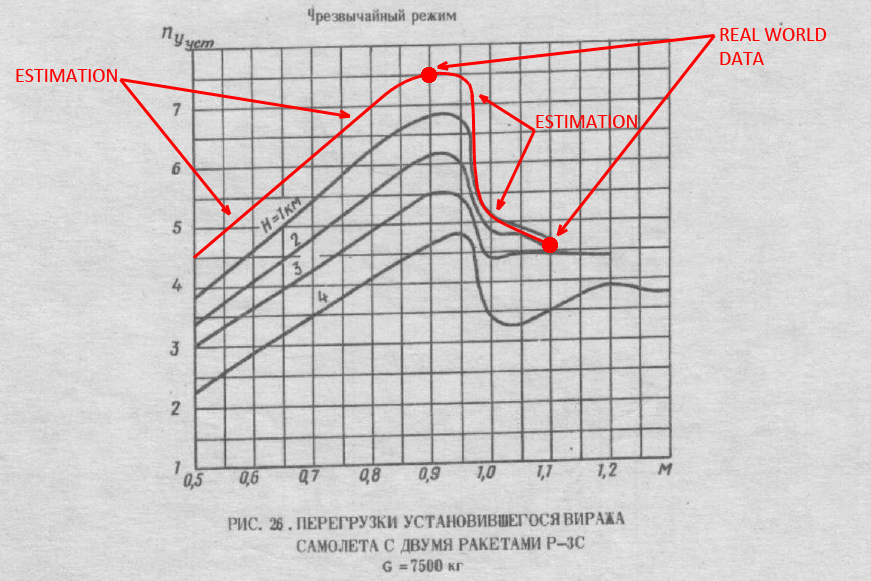
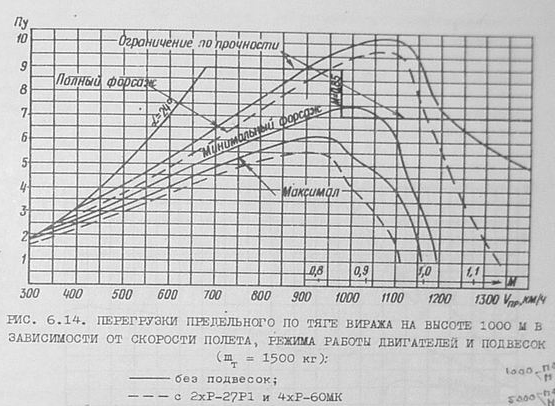
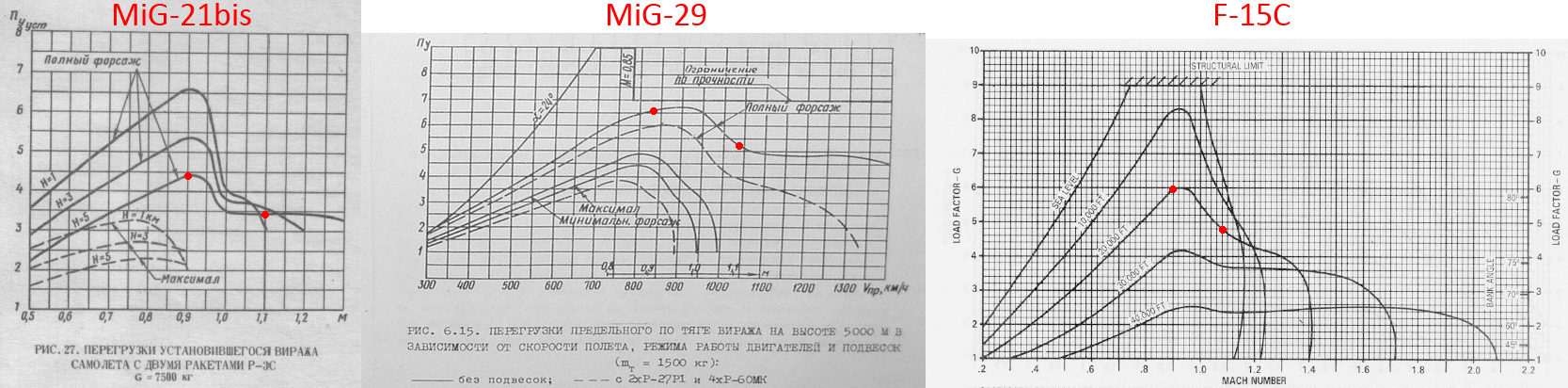
I see in the diagram renhanxue posted that Viggen can sustain 7.5G at 1Km altitude and M0.9. That's not bad at all! Actually, this is pretty awesome IMO. This aircraft will easily sustain 8G at sea level. I put the Viggen data for M0.9 and 1.1 at 1Km altitude in a diagram to compare it with MiG-21bis performance using the most powerful ЧР engine mode. See below how it looks like. At M0.5 the MiG-29 can sustain about 5.1G. So for M0.5 I decided to put the Viggen somewhere in the middle between MiG-21 and MiG-29.

-
The Viggen has such a feature? That's pretty neat! :thumbup: I see in the diagram that at 1Km altitude and M1.1 the Viggen will sustain about 4.6G. In similar conditions a MiG-29 will sustain 6.1G (see attached diagram). Here is a little calculation, yeah it's really rocket science :D 4.6/6.1=0.75 At 5000m and M1.1 the MiG-29 will sustain 5.2, see diagram in my previous post. 5.2*0.75=3.92 Here you go, a Viggen at 5000m and M1.1 will sustain about 4G Thanks for your posts, good stuff!
-
:doh: I not only highly doubt that, I AM SURE of it, I thought I made that pretty clear in my posts. A MiG-21 is not comparable with a MiG-29 in any respect. My example with MiG-29's split-S diagram was just to show that a MiG-29, a vastly superior fighter compared to MiG-21 will need close to all the lift it can generate to be able to split-S in 1000m. My example was meant to show there's really zero chance a MiG-21 would be able to do the same.
-
Hey trains are cool too :)
-
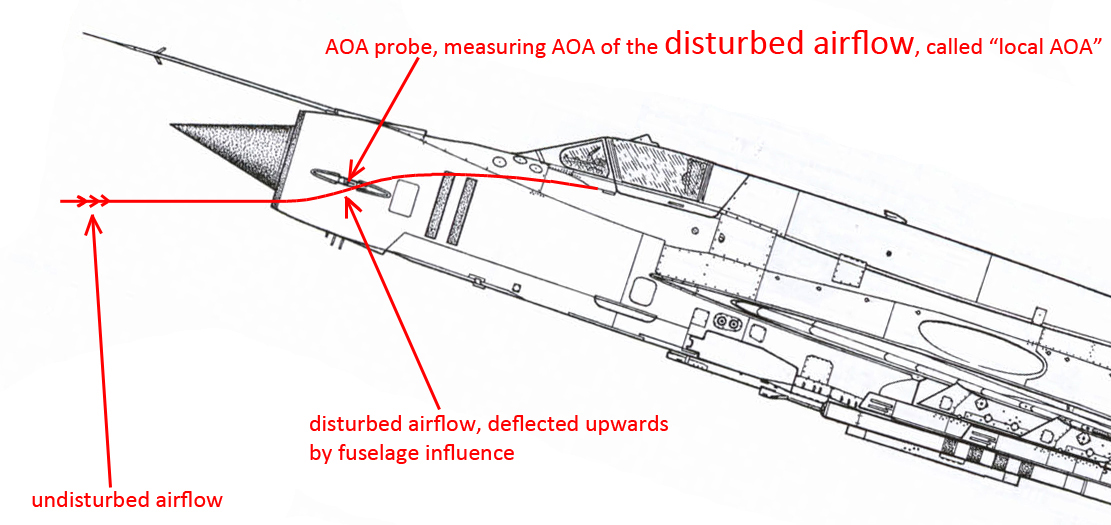
It is clear you don't understand what is going on here. On MiG-21's left side of the air intake there is the AOA probe that feeds the cockpit indicator. The airflow around that area is influenced by the fuselage, more precisely the airflow is deflected upwards. This is called local airflow and the AOA as measured by a probe in that area is called local AOA. Because the local airflow is deflected upwards by comparison with the undisturbed airflow, the AOA measured by the probe will be bigger than the true AOA measured in the undisturbed airflow. The angle measured by the probe is shown as it is on cockpit indicator, even thoug the real AOA is smaller, that's not so important. The pilot knows what is the limit value he can use. That the real AOA angle that "hits the wings" is smaller than what indicator shows makes little difference, you have an indicator and you know what to avoid. In simulator, when cockpit indicator shows 28 deg, switch to external view and there you can see the REAL AOA that is smaller. Real AOA is what defines what the aircraft will do. In order to have real AOA displayed in cockpit, you need to correct it for disturbances. This is what happens to MiG-29 and Su-27, which display real AOA. All Russian aircraft before MiG-29 and Su-27 display local AOA. You might want to know that Su-27, F-16 and MiG-29 have AOA limiters for 24, 25 and 26 deg true AOA. And you really thought you were flying at 28 deg REAL AOA with an old interceptor with a wing with symmetrical profile with no camber, no leading edge devices, no LERX, no nothing? Well, there is a lot you don't know about military aircraft. Maneuvering at 28 deg true AOA is indeed a big deal, and in order to do this, complex configurations were developed for 4th generation fighters and later. And you thought MiG-21 was already doing this in the 60s... :D:D:D Yeah, a real MiG-21 pilot told me the same thing, diagrams are wrong and useless. For example, the real MiG-21's turn performance is actually slightly better than Su-27. And you probably can guess why, MiG-21 is turning with 28deg AOA, and Su-27 is turning with only 24deg AOA
-
You are right with the Cl, you misunderstood what I said. Let me rephrase that: In order to be able to split-S from 1000m like you can do in simulator the MiG-21's lift coefficient at 15 deg AOA would have to be as big as MiG-29's lift coefficient at 24 deg AOA, which is beyond completely crazy.
-
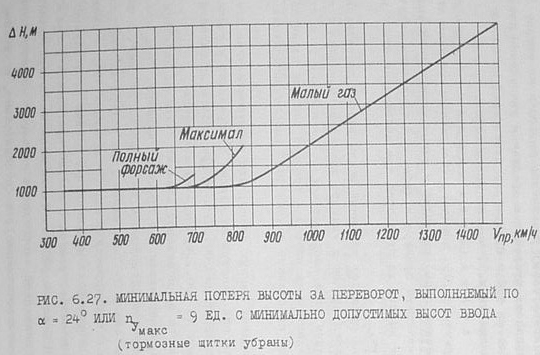
That must be because Tacview is showing cockpit AOA, which is different in MiG-21's case from true AOA which you can see in external view. When in MiG-21's cockpit you see 28 deg AOA, this is not the true AOA, true AOA is much smaller as you can see in external view. The diagram you posted is for height loss when pulling from a dive, not for split-S height loss.
-
People are taking this flight model way waaaaaaaay too seriously. During that split-S in external view you can see the maximum true AOA during maneuver was 14-15deg. The attached diagram is from MiG-29 aerodynamics manual. It shows altitude loss during split-S, but look what they say below diagram: this is for performing the maneuver with 24 deg AOA (or 9G at high speeds). So the MiG-29 will split-S loosing 1000 meters altitude performing the maneuver with 24 deg AOA, but the MiG-21 is able to do it with an AOA of only 14-15deg. Well, that is quite an achievement! This means the MiG-21's lift coefficient at 15 deg AOA is as big as MiG-29's lift coefficient at 24 deg AOA, which is beyond completely crazy.
-
Sustained G increasing linearly from M0.9 to M1.1 ... This is probably a world first. Look at what happens with the sustained G between M0.9 and M1.1 at 5Km altitude for MiG-21bis and MiG-29 and 20kft for F-15C. So the Viggen can sustain 6.5G at M1.1 at 5Km altitude... That is pretty damn impressive. Look at the poor MiG-29, without any stores it can sustain only 5.2
-
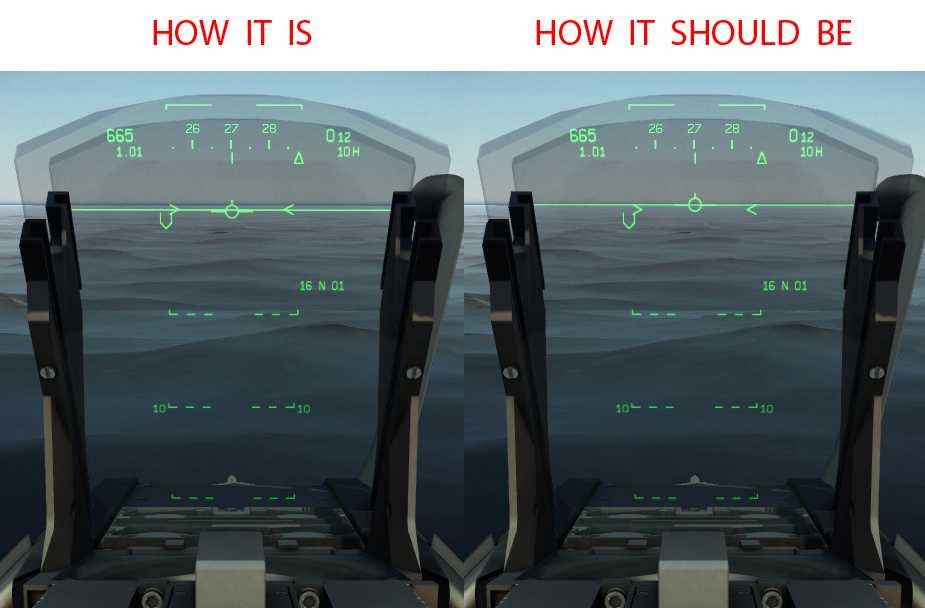
The attached screenshot was made using current version while flying perfectly horizontal very low over sea. The horizon line is in a depressed position compared to the natural horizon, and the velocity vector is very slightly below it. Putting the incorrectly placed velocity vector precisely on the incorrectly placed horizon line, and the aircraft will slowly climb. It's a complete mess. And it's been like this since December. In this example, the horizon line and velocity vector should be overimposed on the natural horizon. After more than 8 months of "intense development" the result is that even HUD basics are not correct. What we have is: - horizon line position is inaccurate (the truth is, actually ALL pitch lines, except perhaps the +/-90 deg ones are inaccurate) - velocity vector position is inaccurate
-
I remember there was a time when takeoff and landing behaviour were pretty decent. After more than half a year, the FM should be pretty well polished by now. Instead of getting better and better, it seems to me this FM is actually getting worse and worse.
-
There was this problem before the latest update. At landing, soon after touchdown the plane would suddenly pitch up and sit on its tail. This problem was "solved" by adding a lot of main wheel drag if AOA (or maybe pitch angle) is above a certain value. This is producing a very big nose down pitch moment, making aerobraking impossible. Especially in the external view, when you look at the way speed decreases in the moments immediately after touchdown it is rather amusing. Practically, the problem was solved with a cheap trick :smilewink: This is how the real aircraft behaves. I counted 14 seconds of aerobraking there.
-
From real aircraft manual: "The antenna elevation position is independent of aircraft pitch attitude, and the angle between the antenna and the ARL is indicated by the elevation cursor on the right side of the scope display." The antenna being pitch stabilised in search, this means if the plane maneuvers nose up, the elevation cursor moves down, and if the plane maneuvers nose down, the elevation cursor moves up. Currently the elevation cursor doesn't move when changing aircraft pitch. Here you can see the elevation cursor moving during maneuvers:
-
Good find bbrz! Made some tests and reached the same conclusions. This is definitely the cause why the aircraft seems to want to glide like forever after landing flare, even if you did the approach perfectly on speed. Personally, I think idle thrust in the conditions described by bbrz is like SEVERAL TIMES too high. I hope this gets corrected soon, as currently the landings are unrealistic. Now there are good reasons to believe that on real aircraft, when you reduce to idle before or during landing flare speed decreases much much faster.
-
Yes, that is some nonesense in Wikipedia. The only MiG-23 versions with a radar scope in cockpit were S and MS, as they had the same radar as MiG-21bis (also the same optical sight). All the other versions with radar use the HUD as radar display: M, MF, early ML, early P use ASP-23 HUD late ML, late P, MLA, MLD use ASP-17 HUD
-
mattebubben, MiG-23M, MF, ML or MLD all use the HUD as a radar display. And there is no such thing as "MiG-23Bis" Here is a "real world" M or MF simulator: Ad here a MLD during ground checks:
-
^^^ What you're saying is true when claiming something is like 5% too small or too big. The errors in % in all my examples above are much bigger and are obvious to the naked eye, really no need for parallax calculation.
-
^^^ BST isn't "required" anything, I'm just pointing out visuals that are demonstrably inaccurate. If BST would do anything about it is up to them.
-
The stabilisation would work fine until he is at an -13deg pitch angle, when antenna would be at its limit. From then on, antenna will remain at its upper limit and when his pitch angle would be -20deg antenna would still be at +25deg and no clutter should appear on scope. How the real system works is clearly described in real aircraft -34 manual, so currently it is obviously not working as it should.
-
Currently the radar scan is probably not pitch stabilised as it should, that's why what IvanK described happens. The elevation cursor shows the angle between the antenna and the armament reference line. When changing pitch of the aircraft the elevation cursor should move on the display accordingly: nose up, the cursor moves down. Currently the cursor doesn't move when changing pitch.
-
This is not necessarily F-5E -specific. In the attached image the pictures have been scaled so the missile body diameter matches the screenshot. It is obvious that canards on the sim model are GIGANTIC. I made some measurements and canards span is approx. 1.5 times bigger than it should!!! Also about tail wing. Sidewinders have two types of tail wings: B, E, J, N, P - small tail wings D, G, H, L, M - big tail wings As you can see in the image, tail wing span is too big and the wings are too long. Probably modeler took the AIM-9M model and just changed the nose and canards.
-
Pilot seems to be too small.
-
The drag chute canopy is huge and it has too many rings. The lines and attaching cable proportions are completely off.