propeler
-
Posts
242 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by propeler
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Let's call it stable release iteration. It works and can be used as functional device. But I already started working on next iteration of it based on much more powerful howerboard motors. But it will be different device and not a simply improvement of existing. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software

-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Yes, it should work. Simply connect encoder to M0 encoder input -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
If you have single axis, there are good news for you In scope of building FFB wheel there version of firmware available already. First one is for ODrive and incremental encoder pair. It can be downloaded from here https://megafile.cc/d/P9or/odrive-ffb-wheel-20210530. In archive there is two folders. One with firmware aand one with UI for changing settings. First connect components as on diagram: Second - upload hex file from firmware folder to ODrive (for example I use STM32CubeProgrammer). After rebooting ODrive there will be new joystic device visible in system. Start UI program from ui folder and you will see window with default settings: You need to press Wright to controller to save them. Then go to Advanced tab: Enter your encoder CPR and press Save button. Thats all. After rebooting ODrive will be functional as FFB wheel. On every start it will be performing short calibration sequence, so allow it to rotate freely. Pressing button will work as a trim, and makes current position as the center. My current task is to finish version for my custom board with magnetic encoders. There are some wierd issues I'm trying to debug and fix. Two axis ODrive with incremental encoders will be in work after it. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Ok. I can prepare version ODrive. Encoders? Now it is for SPI AS5048 and similar. It is native code, no other peripheral needed. ODrive will be recognized as FFB joystick in Windows. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
I have a version of finished firmware and UI for it already sent to the guy who owns device. He will test it when returns from business trip and I will post it with instructions how to flesh it and how to connect encoders. For now it supports custom board. If tests will perform OK i will make a version for ODrive as well in couple of days. If you are interested I can send you this version of firmware. Doy you have ODrive or board from link which I posted on github? -
Ну там рядом уже лежит в открытом доступе залитая для руля. Если кому не терпиться можно взять ее и добавить вторую ось. Или подождать, когда то там будет и прошивка под две оси. Не успеваю я все. И железяки рисовать и софт в порядок приводить
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
No. It is not enoug resolution for precise control of motor using integrated hall sensors. Hall sensors works good when motor rotates at sertain speed, but for FFB purpose motor is almost static in most cases, where hall sensors are useless. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Yep. Now one axis firmware already is on github https://github.com/o-devices/bldc-ffb-wheel-firmware for two axis will be available as well soon here https://github.com/o-devices -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Actually, you even do not need separate controller for it. ODrive is capable to work as FFB device. My first prototype was using ODrive with custom firmware and is wisible in system as FFB joystick without additional manipulations. I use odrive for DD wheel as well.
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
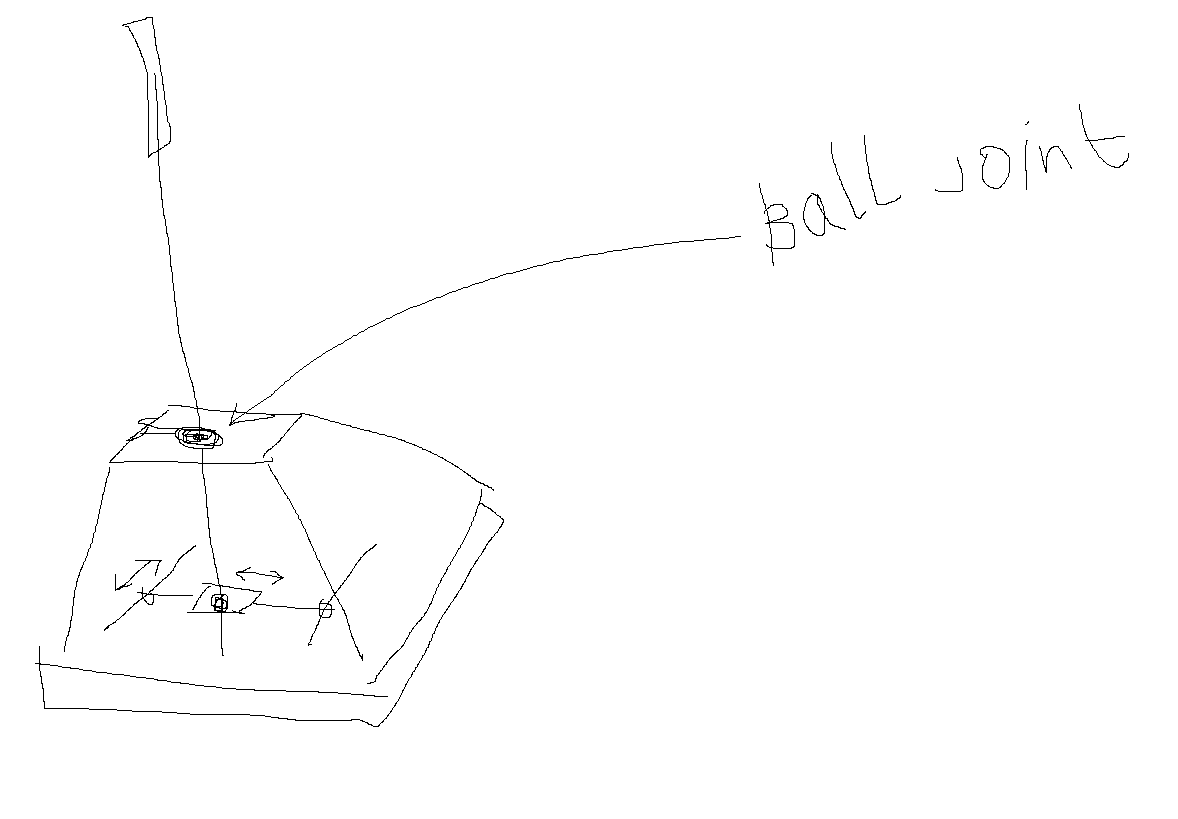
I found even better idea!! This way all moving parts will be close to the ground, and only ball join on top. So center part can be really small, lower part wide and stable.
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Need to think a little bit about it -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
It depends on your usecases a lot. For example if you mainly fly close combat in WW2 planes it is the issue -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Yes. Or great reduction with either belt system or geraing. That's why now I'm trying to find affordable kinematic scheme to use hoverboard motor in joystick. I already use such a motor in DD FFB Wheel for simracing, and the motor is really good. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
You can use any motor which provides enough torque for your needs. Minimum kV for Multistar that i found motor is 100. It means that you can achieve 60 / (2 * Pi * 100) = 0.0955 Nm per 1 Amp of current. For the reference 60kV motor produces 60 / (2 * Pi * 60) = 0.1592 Nm per 1 Amp. That's the reason I was using APS 5063(60kV). Because it is motor with the lowest kV I found on the market. From usage experience APS 5063(60kV) will overheat around 12-15 Amps of contstant current, 8318 around 16-18 Amps. So usable torque limit will be around 2.4 Nm for APS 5063(60kV), and 1.7 Nm for 8318(100kV). It is without reduction, direct drive. Actually oweral power does not give us much information. In case of usage for static torque actions this power can not be achieved because of overheating and low efficiency on low rpms. Only torque per Amp and possible current which motor withstands without overheating matters. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
I propose you to make a pull riquest in github. That way it will be tracked as your contribution to project :) -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
The problem is that I'm not an expert in DCS and FS2020 telemetry. It is not a problem to send any commands to controller whatever we need. But the part about FS and DCS - help of experts in this field is needed. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Correct. That's example what you need if you want to buy it presoldered. https://pl.aliexpress.com/item/4000523269801.html I use custom build board and solder them on my own. If you interested in schematic I will post it. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Added info about controller board https://oshwlab.com/olukelo/btn8982-three-phase-controller_copy_copy_copy -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Sorry 5065 60kv. This one https://alienpowersystem.com/shop/brushless-motors/50mm/aps-5065-outrunner-brushless-motor-60kv-1800w/ My controller a little bit cheaper, but not much from china ODrive clones form aliexpress. I will post info about my controller soon. Decision is up to you. It will not make much difference. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Sure. Added belt info to readme -
https://github.com/o-devices/bldc-ffb-joystick-base Усилие зависит от того как хендлить перегрев Я бы сказал безопасно без принудительного охлаждения 1.7 на такой длине ручки... Но лучше пусть ответит Макс на каких усилиях он его гоняет.
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
https://github.com/o-devices/bldc-ffb-joystick-base -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Hi. There is small review of how it works but in russian language only. May be eventually @MaksimSaveliev will make an english version too I can post plans but I do not have much time to write detailed instructions and answer technical questions. So to build it you need to have good knowlege in electronics and software development. About prebuild version - it is possible in theory, but again... who will be providing support of it? Yhat's the question :) -
С материалами такой вопрос, что я могу их выложить для той версии которая сделана для Максима не приводя в порядок - кто сможет - тот разберется, но от меня сразу же будут требовать отвечать на все вопросы: как что к чему прикрутить, а что можно использовать вместо того что у меня нет и т.д. А у меня на такие вопросы отвечать времени не шибко есть Мы с Максом провели не плохой такой кусок времени в решении вопросов по уже собранному девайсу в телефонном режиме. Отвечать всем даже в таком количестве у меня времени не хватит А когда начнутся вопросы по самой сборке.... Вот я и в раздумьях что делать со всей этой ситуацией. З.Ы. Заказать то можно, но что делать с саппортом?