propeler
-
Posts
242 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by propeler
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
As for me the best solution for any kind of modern grips - to use "pass through" approach, when you just use longer cable to native controller. Either VKB, VPC or any other kind. It is the most bulletproof solution. Because modern grips commonly use proprietary not open protocol for comunication, trying to emulate their protocol usually not relayable enough and have different limitations. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Write me to PM. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Just PM me an e-mail. I will send you all needed files -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
It is not a problem to make it one axis, I have FFB wheel project closeli conected https://github.com/o-devices/bldc-ffb-wheel on similar firmware. The only question is HOW it should behave (I'm not an expert in helis) and which telemetry we need to obtain from the game to calculate this behavior. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
It depends on country.... and even on city. And possibility to 'arrange' the cost with a workshop which will be cutting/bending metal. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Could you measure backlash on RMD X8 version? And is it normally backdrivable? -
YEs, variable resistors. I use whatever found and then tune them.Them are usually multiturn and can be tuned pretty precise. I did not checked exact value but I think something between 2k and 20k will be ok.
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
I was looking at those motors. Them are pretty expensive:) -
Yes. It will be standalone application with output to directinput FFB device in first version. I already implemented MSFS, DCS and Warthunder telemetry. Working on direct input devices stuff. And "my device" is not my any more
-
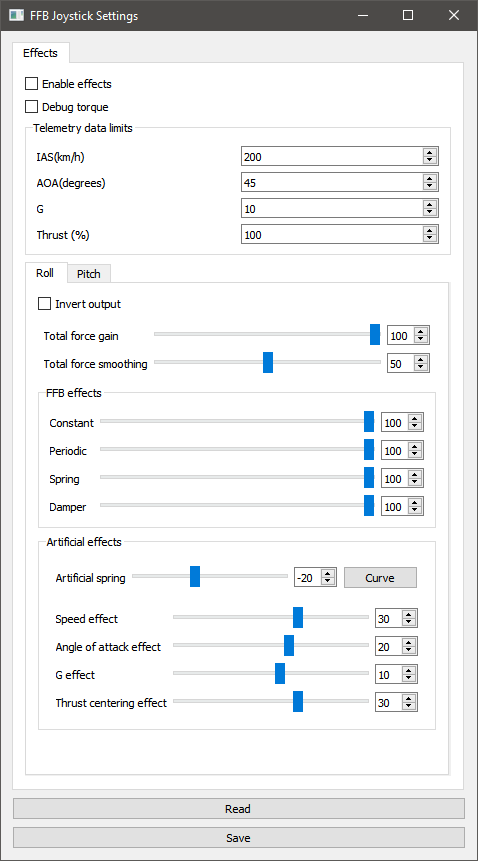
Actually, it is possible to implement A LOT with telemetry provides from DCS. Even basic telemetry. In my firmware I implemented bunch of effects and more to come. There are: - Stick load depending on speed. Natural square curve progression. - Stick load depending on prop thrust, so emulates prop washing of control surfaces. - Artifficial spring based on AoA and G force(obviously with curve tuning) - Elevator weight emulation - Air dynamic center shift effects due to flaps, gear, spoilers retraction. - Turbulence effects due to flaps, gear, spoiler retraction. - AoA and G force shaking. All shaking effects with tunable frequencies and power. - Landing effects. And some more are planned. Expect separate application that can feed any FFB joystick with such effects to be released soon
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Yes. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Actually it is there https://github.com/o-devices/bldc-ffb-joystick/tree/main/dcs -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
It is not needed, but I use it. I use combination of speed, aoa , acceleration and thrust to generate effect augmentation. But normal DCS FFB is prety good on it's own. Especially on selected aircrafts. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
https://github.com/o-devices/ffb-joystick-howerboard-motor-base all needed files to replicate v1. Feel free in building your own. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
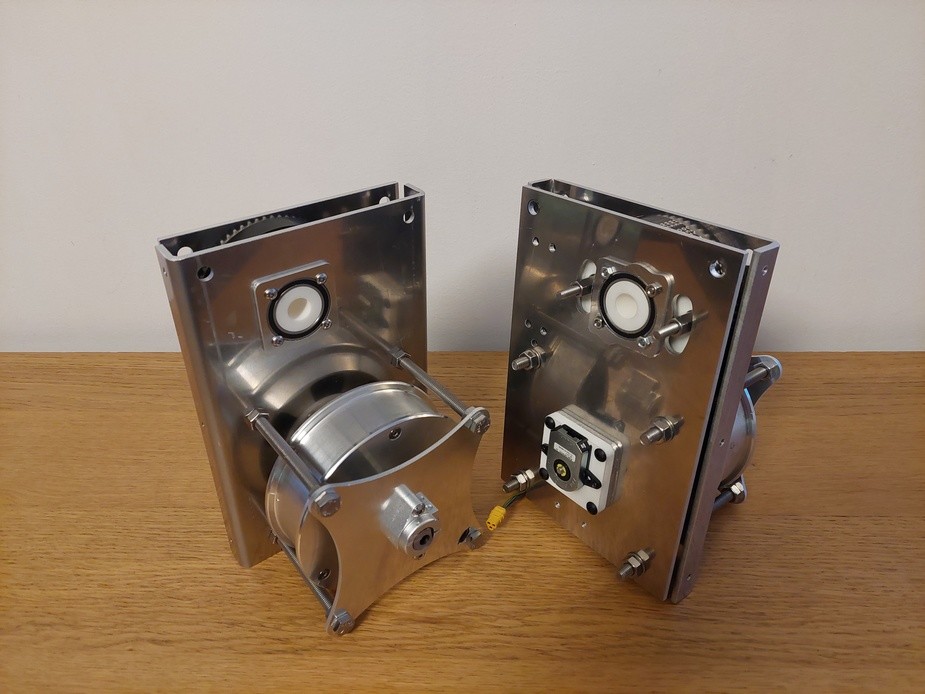
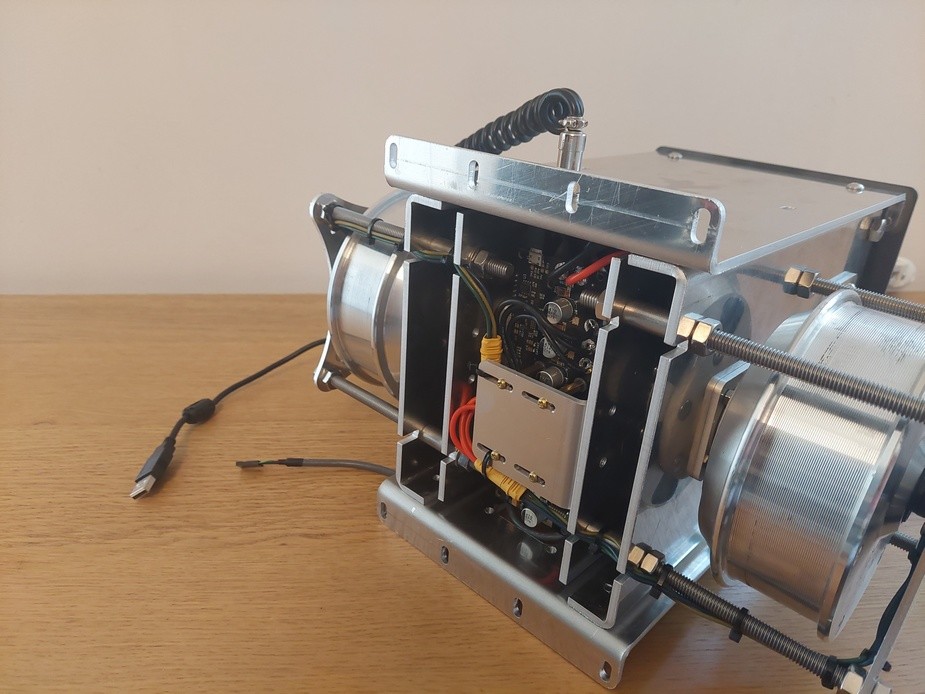
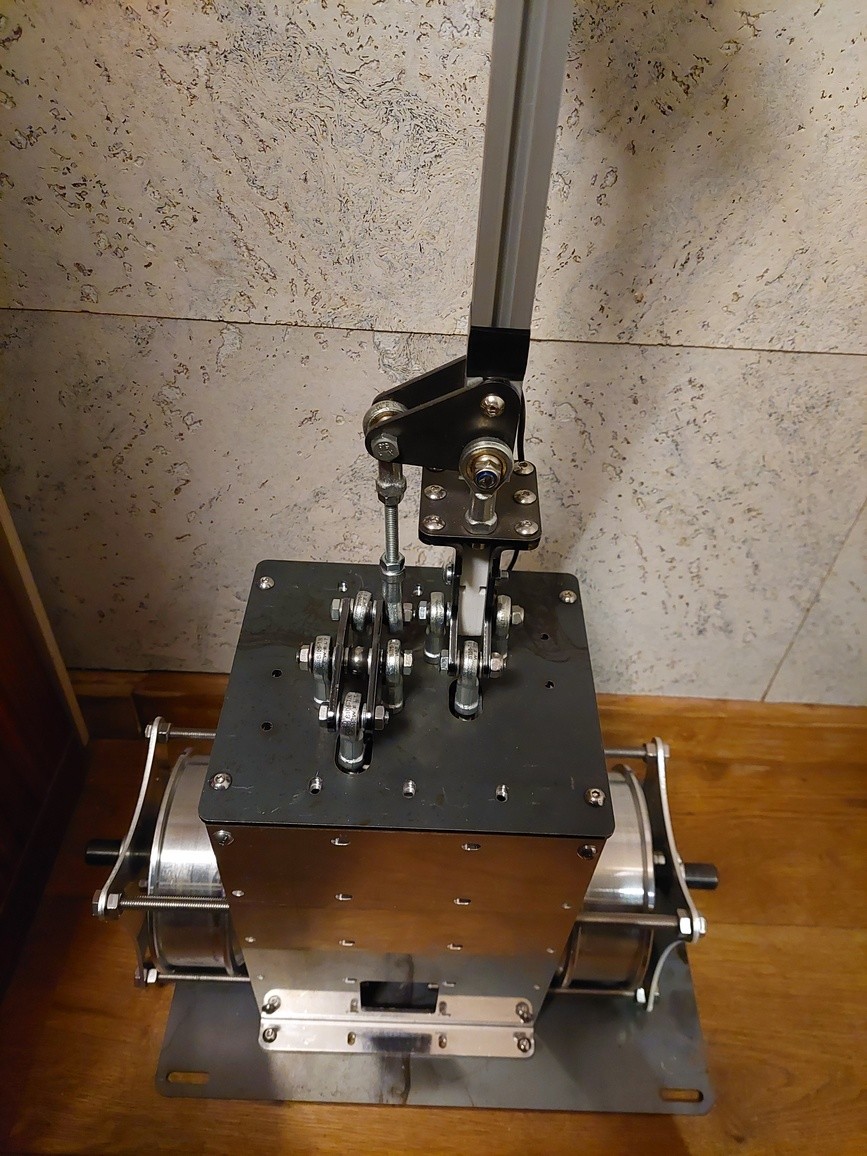
"Assemblability" of new version with smaller motors is checked. Same gimbal style. More compact dimensions. Height can be reduced even more by extracting controller to the separate box. Link to files for DIY will be availables soon from github page.
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
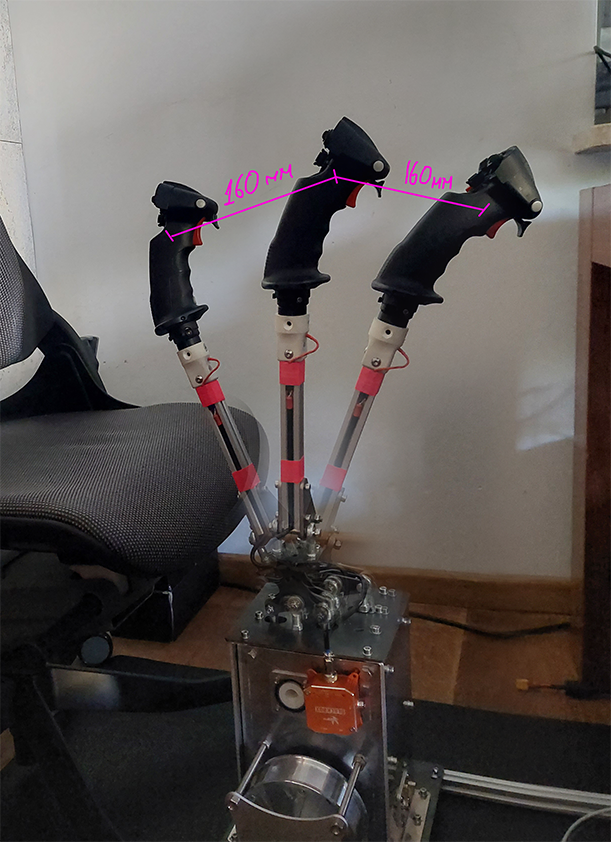
For those who would like to repeat construction that is already build and tested production files are awailable. Stick deflection and force in this configuration:
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
More documentation will be added later but firmware and ui are there https://github.com/o-devices/bldc-ffb-joystick -
Hi, Are you russian speaking? I'd like to talk a little bit about new pedals.
- Show previous comments 1 more
-
Я хочу сделать на основе них педали с форс фидбеком. В связи с этим вопрос. Свое ли у вас производство? Если я нарисую проект то вы сможете изготовить "приставку" педалям? Чисто железо.
Второй вопрос. Педали всегда будут по предзаказу или наступит момент когда прийдет серия и можно будет просто купить без ожидания?
И третий вопрос какой датчик будет стоять на главной оси, С него можно будет получить позицию напрямую? (мне для FFB надо будет)
-

-
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Both variants will be possible. But will depend on logistics. I need to check if will be possible to ship outside the Europe. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Some updates. From my experience and wishes of real pilots to have more power on the stick so I choose another solution. Frist - already existing, powerfull and proven by time board as the controller - ODrive coupled with incremental encoder. I wrote custom firmware for it so no need to have a 'tree' of separate boards. You only need to flesh ODrive with custom firmware, and that's all. As the bonus - posibility to use virtually any BLDC motor that does not come out of ODrive power restrictions. Second - metal as the main material for the gimbal. As the result variant with motors from hoverboard gives 5kg force(with 10A power source) on the full sized ground mounted flight post. But with more powerfull PSU it definitely capable of handling significantly higher force. Firmware supports not only standard FFB effects but augmentation with effects based on DCS telemetry - force is affected by speed, G, angle of attack and thrust of motor( and yes, it is possible to use the same augmentation for rudder pedals as well even considering that DCS does not provide effects for rudder axis) So, for those who wants something more powerfull - you are welcome :)
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Don't mind, I do not have questions to you, I simply let people know that this kind of gimbal (let's call it 'microsoft sidewinder style') made in plastic is not rock solid. Gimbal printed in SLS with extremely strong PA12 plastic with 100% fill rate at 5kg force at stick handle, eats more than 15% of motion range with flex. So people should take it into account. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Do not hurry! I prety sure that I know what the gimbal inside of it and I can say that it has one serios drawback. That type of gimbal when made from plastic simply can not be done stiff and rigid enouhg to handle high torque. Experiments of other guys here in the topic and my experience showed it. Thats why this: was turned into this:
-
Demo works for Pimax headset correctly.
-
I'm just wondering if DCS will benefit of it https://developer.nvidia.com/vrworks/graphics/singlepassstereo or it is implemented now and we can not get some FPS bust there?
-
For all who would like to build their own. CAD project of the base is in attachment. It is variant for "under-the-chair" or "floor" mount, because it has bigger dimensions. Changing width of arms of flex plate(cross-like element) and changing thickness of it it is possible to change overal travel of the stick. Fill free to add case for it and possibli travel restrictors. Chears! LoadCellBase.STEP Prototype of full length stick is already ther Range of motion with forca around 6kg applied to stick