earnil
-
Posts
107 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by earnil
-
Yeah, it still feels bit WIP, but I guess there are also issues with TPOD itself that might mix in (like I don't think the POINT track mode is fully implemented yet). The basic functions like zoom seem to work though. Still there are some things where I'm not sure if it's a strange design choice or bug. For example in HTS mode, NWS doesn't reset the TPOD to default position but in TDC mode it does.
-
What helped me a lot is that I started to use gentle rudder inputs for lateral control rather then ailerons. Also, most probably you're not doing this, but still I'll mention it - don't look at the basket once it's past the refueling lights on your canopy frame. You need to know how the 'right' position looks like when looking at the plane (I look at the engines and refueling pod usually and it works ok) In the end, I actually find Harrier easier then Mirage. It seems to me that it's much more stable and smoother and generally easier to control. Maybe I'm not doing it right with Mirage, but every time there's a slightest change of speed it either dips or climbs and I find it quite hard to cancel out. Harrier is just much more docile compared to that.
-
When in TPOD TDC mode, you can double click the Sensor Select Down, which activates HOTAS mode which enables you to control the TPOD with Sensor Select switches. Left changes Narrow / wide view, aft, if I remember correctly AREA / POINT tracking etc... You can check manual for the exact functions.
-
I love Viggen, it's probably my favorite module, but to be objective, let's mention couple of downsides as well: - no internal guns (you can equip gunpods) - no internal countermeasures (you can equip CME pods) - limited interdiction capability - A2A weapons and avionics suite is very very basic - no A2A refueling So you're fairly limited in what you can do in the air. Basically, you go to target, you dump your stores on it and you go back. What you can't really do is to loiter in the area and pick off targets in a similar manner A10 can. You also need to make compromises in what stores you equip due to lack of internal guns and CME. Gun pods, CME pods and antiship missiles occupy same hardpoints so you have to choose. Viggen can carry up to 4 Mavericks, but then you can equip only RB24 A2A missiles instead of more advanced RB74 so again, you need to compromise. In A2A combat, Viggen can hold it's own against Mig 21, but against anything newer, you either run or die. It's also fair to mention, that there are bunch of persistent, annoying bugs, like that the repair doesn't work, the RB74 missile performs nowhere near it's potential and one of the most powerful weapons, the BK90 cluster munition dispenser, doesn't work properly in MP. On the upside, LN has been really working hard to fix those (and generally are very responsive to bug reports) and for example, we should get BK90 for MP soon. So in the end, it really depends on what you're looking for. If you're looking for a plane that will dominate the battlefield by destroying all the available, dispersed ground targets and then can go hunt enemy 4th gen fighters, you won't get that. I can mention why I do love Viggen though. First off, it's amazingly fast plane, with unique design philosophy, which has been modeled with tremendous attention to detail (the sounds!). And second, it gives me the right mix of automation and stick on flying. Your navigation suite is helpful and easy enough to operate that you still have the incentive to use it and same goes for radar. But it's not completely point - follow cue - obliterate of A10C. Lastly, I agree that ACG Cold War is by far the best place for Viggen. Most of the missions have exactly the targets Viggen excels in destroying and A2A environment is challenging but not impossibly so.
-
Most probably only through crosshair, I mostly fly Viggen :smilewink: But never mind, I suspect that this will be some freakish network issue on my side because when I try to connect to server via IP, I get 'Server offline' message.
-
No problem, sometimes it's the simple things. Sadly not in this case:( But knowing that at least the server is up and the problem is on my side helps, thanks a lot!
-
Hi everyone! Apologies for the question, but I can't connect to the server since at least Friday. I'm trying to find out, ... can you guys still connect and the problem is on my side or is the server really down?
-
At least for me, it appears to be fixed. I had exactly the same problem, it was taking ages to take off trim, but now it's about 2 secs. Another thing that helped me was to delete POV mappings on the trimmer hat on my Warthog. The trim doubles as POV so it has also down - right / down left directions which I noticed I accidentally pressed when trimming down (causing trim to stop).
-
Clearing reconnaissance tracking targets + viewing course / speed
earnil replied to earnil's topic in DCS: AJS37 Viggen
If I understand it correctly, rapid T0 - T1 - T0 should switch between route destination (the M1 or S1 in this case) and 'RUTA' display: If I understand it correctly, when you toggle this to RUTA display, you get the polygon display, but the steering cue is still towards selected target. But it doesn't work always - sometimes I get one side of the polygon stuck on radar screen and then all seem to stop working:( The SKU transfer mode is super unintuitive. At least for me, sometimes the transfer confirmation (the number of S target) is not shown at all and most importantly, there doesn't seem to be any time limit on the second press of SKU button, so if you don't notice, you can press SKU 30s after first press and it still transfers the target. Also, for me the corners of RUTA polygon are shown as white M, rather then R - again, not sure why. You go to ANF, it keeps the last target (be it M or S) as a destination, unless you change it by selecting different WP. For RB 15 I'm not aware of any way to do that, but since you can just designate Bx8 and Bx7 with radar, it shouldn't be a problem -
Hey everyone! I'm trying to figure out the reconnaissance mode and there are two things that I just can't figure out 1) Is there any way how to clear existing tracking targets? (S1 - S9)? Or once you assign S9 you're done and there's no way how to, for example, delete S1 and reuse it? Manual mentions that but so far I haven't been successful. Does anyone know how to do that? 2) How do you actually view the course and speed of the target? Even after making a second fix (after waiting 3 minutes) the CK37 still just shows my current position. Also, another question - when in SKU mode after second fix, should the radar position marker track the target (ie the green circle on radar moves along with given speed and course), or it will always stay fixed? Thanks in advance for your help!
-
AJS-37 overall behavior changed with the latest patch?
earnil replied to Lt.Seahawk's topic in Bugs and Problems
Can I ask what is the source of the information? For example Viggen's guide treats this as if take off with afterburner was optional On broader note, I thought it was just me imagining things, but since others seem to have similar experiences - it also feels to me as if there's something wrong about Viggen's performance, especially at low speeds: 1) I'm quite sure that I was able to take off without afterburner with combat load (regardless if that's correct procedure) like 2 ARAK, 2 missiles, X TANK but now I'm not, even stage 1 AFB is not enough. Again, not sure if this is a problem or not, it's just my observation of the change. 2) AFK has quite a trouble maintaining 550km/h speed even with relatively shallow climb. I understand that Viggen's dry thrust is not something spectacular, but again, my sense is that it was not 'that bad' 3) On Nevada map, during landing with gear out with AFK, the plane tends to settle at quite high AoA and even stalls if I don't disable AFK and fly it manually. Maybe that's because Nellis is relatively high compared to other places so again this may be intended behavior... -
I had, I think, very similar issue. It seems to me that it's connected to the position of weapon selector knob. Switching it to 'ATTACK' should fix it. As it was some time ago, I'm not sure how it's for other positions but RB75/MARK/DYK will reproduce this as well, I think.
-
Had same issue, the problem was USB Hub. Solution was to connect controllers directly to PC's own USBs rather then through hub.
-
You're absolutely right about the dive angle. I've run couple of tests myself and if I keep the dive angle at the white line on ADI (I think it's 15 degs dive) I'm able to hit the targets regardless of QFE settings. I've been hitting targets now with altimeter set at 1150 hPa while QFE was 976, no problem.
-
I actually checked this before submitting here and the altitude differences for Nelis are within couple of meters so this shouldn't be a case. It appears to be caused by a (probably DCS wide) bug that Frederf mentioned, which affects (if I understand it correctly) the way how altimeter displays the QNH in cockpit https://forums.eagle.ru/showthread.php?t=201641 My followup question was basically whether this can have specific impact on Viggen since it needs correct pressure setting to calculate the release point for certain weapons (ARAK, AKAN, the BOMBS:)(I don't think any other DCS aircraft uses it quite like that). The question is, whether Viggen's computer 'knows' correct altitudes / pressures and just displays them incorrectly on backup altimeter or whether this bug also affects the release point calculations. Especially in a light of many people reporting issues with ARAK which relies heavily on correct QFE settings. Although I did couple of tests yesterday and it seems to me that in fact, it's only about the display of altitude / QNH on backup altimeter. The QFE settings seem to be unaffected. I still don't know though.
-
Here it is! https://lis.rlp.cz/vfrmanual/actual/enr_3_en.html Section 3.4.1 Also, I just noticed it’s no longer called AIP but rather VFR manual (but it’s apparently same thing). Just to be completely transparent, my knowledge about this comes from the fact that at one point I was doing a sail plane license which I couldn’t finish due to work commitments (I completed the training but never went through the examination) so I’m by no means expert and i’m well out of the loop so I don’t claim any particular expertise on this. This is just based on what I remember from my training and what I was able to check in the relevant documents so it may be possible that I’m misremembering / misinterpreting this.
-
Discrepancy in altitude / QFE / QNH settings That’s interesting. I checked our AIP and it’s quite specific that in controlled airspace you need to use local QNH and regional only outside controlled space (well as you can imagine it’s not that straightforward but that’s the gist:-) Probably must be defined differently for your country. Didn’t realize that even things like that differ from country to country. edit: grammar Sent from my iPad using Tapatalk
-
I know but that's what it shows (see screenshot). Well, I don't think it's exactly like that either. Airport QNH is based on pressure reading at that airport (QNH is calculated from QFE) and therefore those converters would work (I actually think that by definition QNH has to show airport's true altitude above MSL). What you probably mean is regional QNH which is the lowest QNH from certain region.

-
Ok, thanks a lot! I guess that's it. Question specifically for Viggen though. How does this impact deployment of weapons that rely on correct QFE settings? For example, in this particular case, does the plane 'know' it's in fact at altitude 561m and will it calculate the impact point correctly?
-
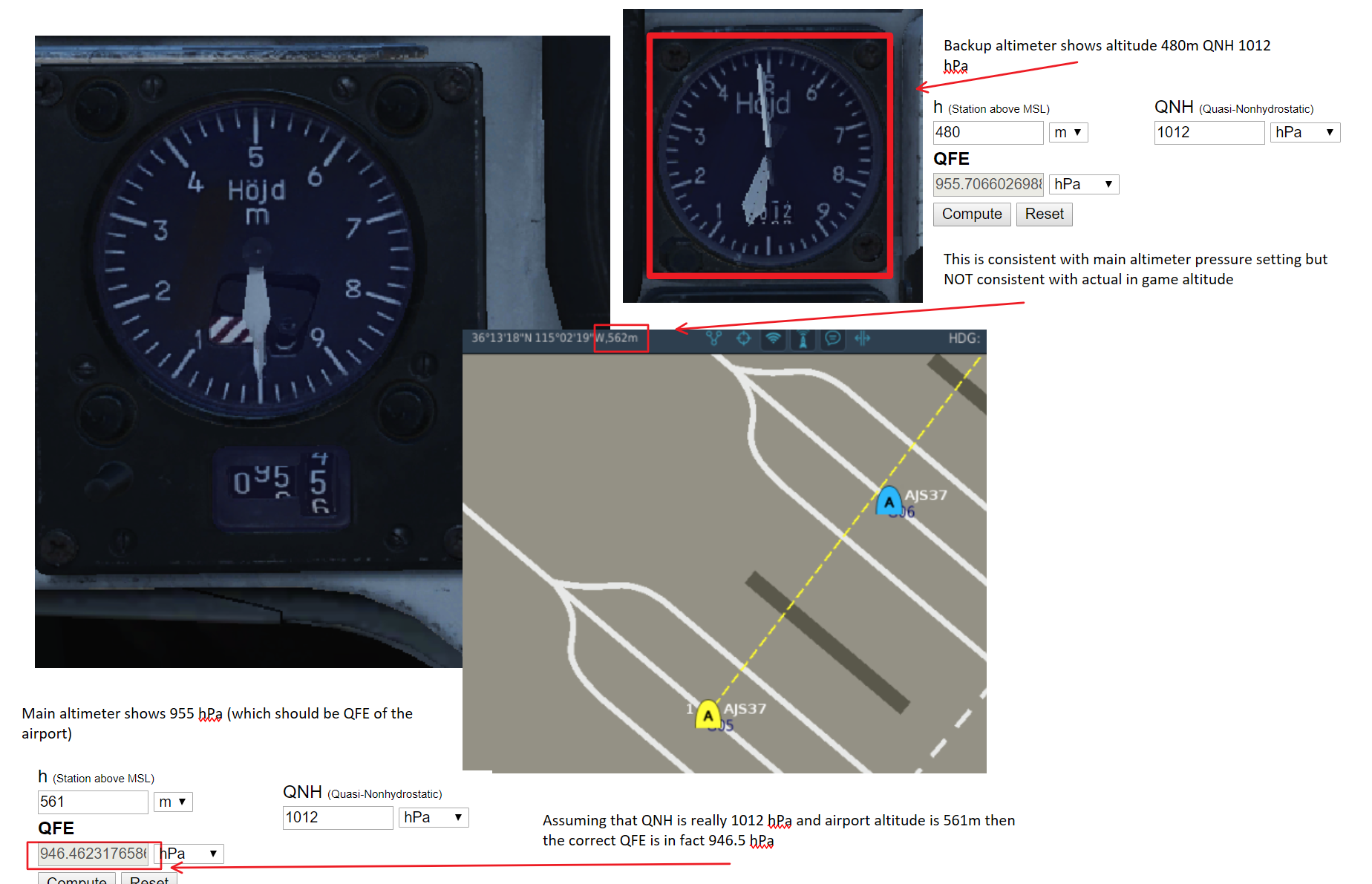
Hello! I have noticed a ... let's call it a glitch ... and I'm not really sure if I'm just doing something wrong or this is actual problem. Situation - Mission 3 of Red Flag Campaign - starting position (this is just an example, I have noticed similar behavior in other settings as well) On F10 map, the altitude of Nelis AFB is noted as 561m / 1840ft QNH as per mission editor is 1012 hPa / 760 mmHg Pressure setting on main altimeter (which shows 0 altitude) is 955 hPa Pressure setting on backup altimeter - 1012 hPa and it shows altitude 480m I did a cross check with some online tools that can calculate QNH / QFE / h like this one: http://www.hochwarth.com/misc/AviationCalculator.html#QNHQFE Altitude of 561m with QNH 1012 hPa is consistent with QFE of 946 hPa (not 955 that is shown on main altimeter) QFE 955 hPa is consistent with altitude of 480m as shown on backup altimeter rather then in game 'true' altitude of 561m of Nelis AFB. I'm not sure if my explanation makes sense so I'm attaching a picture as well (hopefully worth 1000 words) Same issue happens with Caucasus map as well and the error appears to grow with altitude, i.e. if the plane spawns at sea level, there is full consistency, higher the altitude more the setting seem to differ. I'm taking my chances and reporting this as a bug, apologies if this is just me not understanding something properly.
-
My popup points are totally wrong....what am I missing?
earnil replied to Nealius's topic in DCS: AJS37 Viggen
Hm, you're actually right. It could be. My mistake was that I always input just XXXYY and it seems to work just fine for me so I assumed it's same like when you're inputting VIND info where it's also XXXYY. Also I think the cheat sheet for computer codes implies that it should be XXXYY, so that probably reinforced my belief that it has to be XXXYY, but in the end you're right, it doesn't state it specifically anywhere. -
My popup points are totally wrong....what am I missing?
earnil replied to Nealius's topic in DCS: AJS37 Viggen
Yeah, it discusses the pop up point input on several places and some of them are vague. I just checked myself and the most relevant part is on page 186. It doesn't mention the format specifically, but there's a picture that shows that it's XXXYY. -
If I remember correctly, if you forget to insert the cartridge and run 9099, the waypoints won't load. The cartridge must be there for flight plan to load. You still get the LS / LMAL and you can enter the waypoints manually.
-
My popup points are totally wrong....what am I missing?
earnil replied to Nealius's topic in DCS: AJS37 Viggen
Pop up points are definitely defined FROM pop up point TO target and moreover accept XXXYY value rather then XXXYYY (you can input only whole numbers for distance) I'm not sure how you ended up with the actual position of the pop up point you report, though. Maybe the fact that you input six numbers instead of five confuses the computer in some weird way. -
The functionality is bit confusing but this is what I understand: SERIE / IMPULS - with antiship missiles SERIE launches all missiles, IMPULS one by one. - with ARAK, it selects between normal (NORM) and long range (LA) mode GRUPP / ENKEL - with antiship missiles - this tells the missile whether you're attacking group of ships or a single ship. Not sure if and how this is modeled in DCS - with ARAK - selects between firing all missiles (GRUPP) and one by one (ENKEL) The serie / implus switch would be much more logical choice for selecting whether you want to fire ARAK one by one or all, but since it's already taken by normal / long range mode, I guess HB thought the other switch is next best thing.