darkman222
-
Posts
1307 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by darkman222
-

Varjo Aero: Общее руководство для новых владельцев
darkman222 replied to Supmua's topic in Virtual Reality
Thanks. That was the question yes. But I can read it out with the toolkit. So I can compare it with what fpsVR is showing and confirm that 100% in steamVR is also the same resolution I have set in Varjo Base. So I can compare results if I get it running again without steamVR -
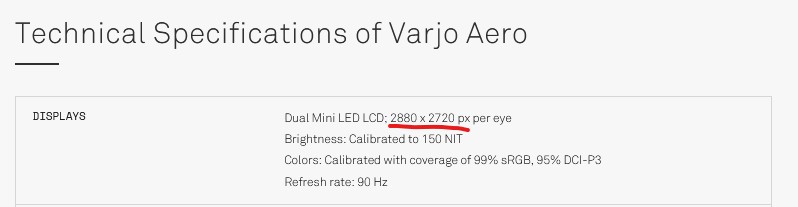
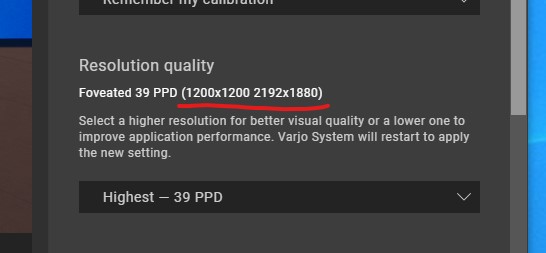
The Aero is 2880x2720 per eye on the specs page of Varjo. The Aero is 1200x1200 / 2192x1880 if I trust Varjo Base Software. And the Aero is 4148x3556 per eye if I trust Steam VR. (screenshots) When I use mbucchia OpenXR toolkit, I can read out the same resolution as steam vr, and when I reduce the resolution in steamVR the openXR toolkit will show the same resolution. So I conclude that the "real resolution" the Aero runs is 4148*3556 per eye which is much higher than advertised. Of course you'd need to render a higher resolution of the image but this is way higher than the physical resolution the Aero seems to run. As the real render resolution it runs is the exact multiplier value of 1.89 horizontal and vertical resolution, I wonder where does it come from that Varjo considers this to be 100 % resolution. This is an exact multiplier of 1.89 compared to maybe 1.2 I would use with the Pimax to make a nice image. Has someone an idea where these values come from?

-
Varjo Aero: Общее руководство для новых владельцев
darkman222 replied to Supmua's topic in Virtual Reality
If you use fixed foveated rendering it will improve performance, with just a little loss of resolution around in the peripheral area -
Varjo Aero: Общее руководство для новых владельцев
darkman222 replied to Supmua's topic in Virtual Reality
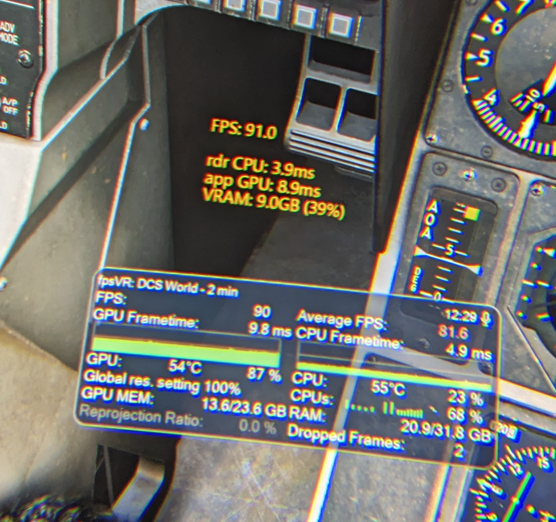
Sorry for possibly hijacking the topic here. I am trying to find the most performant combination for DCS with OpenXr with MT. I am using SteamVR as openXR and I am trying to revert back to the standalone openXR from Varjo Base. Which seems to produce a black output after I installed the mbucchia OpenXR toolkit. Still investigating. But ( in case I get the Varjo base OpenXR running again) I need to measure framerates and frame times between the two openXR types. So here is what I just found. fpsVR and the mabucchia toolbox show a difference in frame time of pretty much 1ms. If I just relied on the mbucchia toolbox to compare frame times it would not matter I guess. But it is still weird that fpsVR and the mbucchia toolbox have such a difference. Edit: Also see that the Vram usage is displayed differently 13.6 GB vs 9 GB Where do all the differences come from? See a screenshot:
-
@AZDane With my testing of the MK1 I had an arm support, but pulling the stick back with force at the same time while the roll input has to be done in very small and precise doses it is very difficult for me to coordinate. Thats why I still keep my traditional gimbal stick for dogfighting. I might mount my MK2 stick to where I had the arm support. At the moment it is on my desk mount, as you can see in the videos. But I'll give that another try. I see what you mean considering the graph shown for the MK1. If the green line went on up to 25 lb force, it would be as real as possible. But 12 lb force on a desk mounted or even sim pit mounted stick in a simpit that does not throw you around like in a moving jet feels already quite like a lot of force. I dont know, but the MK2 feels a lot easier to handle to me. Will keep on testing.
-
Thanks @303_KermitKermit for the summary. I have my traditonal gimbal and the FSSB. It takes time to get used to. So I switch between them. The biggest problem I have with it is while pulling Gs to adjust the gun funnel. Pulling Gs and rolling the jet the same time is very unpercise for me. I just end up in a pendulum-like rolling the jet, or pilot induced oscillation around the roll axis, you might call it too. What do you mean? You mean the audible clicks by software or mechanical clicks? Mine does not do that. Maybe yours is faulty. @AZDane Now I can compare all of the three. I have an older Realsimulator FSSB Lightning ( less movement) and a new Realsimulator FSSB Ultra ( 1/4 inch movement) realistic as Realsimulator claims. Maybe you can confirm or disapprove. Might be hard to tell by just watching my videos though. So to sum it up, between the Winwing MFSSB, RS Lightning and RS Ultra. 1. The Winwing hybrid base is sensitive around the 0 position. But I guess just because they use the traditional displacement gimbal underneath. But its unrealistic, so I am selling it. 2. The RS Lightning is very hard to get used to due to the little displacement. But very sensitive around the 0 position. 3. The RS Ultra is much easier than the Lightning to get used to. Due to the bigger displacement wich makes it easier to adapt to, it feels more sluggish around the 0 position. I test the sensitivity with air refueling and the precision while pulling Gs while dogfighting. So its the two extremes. Please watch my videos of the Lightning and the Ultra. And dont mind the music. I am digitizing some of my fathers old magnetic tapes @AZDanelet me know your opinion on these two force sensing bases too. As youre saying you have 2000 hours in the F16: Did all the later F16 SSC have the same amount of displacement between blocks? Or was even between modern blocks a difference in SSC displacement? Of course I know the first F16s did not have any SSC movement at all, but have those F16 (A models ?!) been used in service? Or did just the prototypes have the SSC with absolutely no displacement. I'm curious about that.
-
Winwing and RS/Thrustmaster is not comapatible. Even if you could adapt the electric connection, the mechanical connector works completely different than the Thrustmasters. @AZDaneThanks for your opinion. So we might agree that with the current Winwing MFSSB is not possible to make it work and feel like the real F16 SSC. I really dont understand why Winwing went with that "hybrid" approach. I realized the additional blade springs in the MFSSB package. Are they to be used to make a stronger resistance or to convert the base back to a traditional gimbal? I did not dare to open the base, to see what they'll do. I will be selling the base on ebay now. How do you come to have 2000 hours on the real F16 SCC?
-
I dont want to make double posts, but consider to have a look at a test I did in another more general thread about force sensing sticks:
-
Got my Winwing Base now. To demistify all of the modes, I have made a video to illustrate. First things first: I think the Winwing base is an F16 "inspired" force sensing base, but no mode really replicates the behavior of the real jets stick. Even if I changed the stick physically to a "force sensing only"-stick, disabling the displacement totally, it would become like a Saitek X65F which does not move at all. As it is known the modern Vipers have a small displacement in the stick, only the very first Vipers did not have any displacement at all. And we, or at least I am looking for the behavior in the sticks from the modern Vipers Block 50 - 52. Shown in the video: a) Force + Displacement. Displacement first, until you hit a "wall", that can be felt and even heared in the video. Then the force sensor takes over. You can see the blue and red bar mixing together in Simapp Pro. Conclusion: Useable, works good but not realistic. Displacement should be possible up to max deflection not only for the first part of the input. b) Force only mode. The displacement is deactivated and you end up with a big deadzone on every axis. Conclusion: Not useable and totally unrealistic. c) Fully realistic mode. Only the little range of displacement is used to input full deflection. The force sensing part is basically disabled. Conclusion: Not useable, way too sensitive and not precise because full deflection does not use force sensing at all. General conclusion: Unless it is possible to change the hardware to get force sensing behavior while the stick is being displaced until the input limit is reached there is no way to consider that base to behave like the real thing. Let me know your thoughts, and if you know of such, link me to a document or video that shows how to get the base behave like an actual F16C stick. Btw, sorry for hijacking this thread as it started as a Realsimulator thread, but I ordered my RS Ultra just now and its about to arrive soon for more testing.
-
I am confused. Can someone sum up what functions we currently have, besides the radio transmit functions? IFF in(board) sends steerpoint data to my flight. Thats worked already fine for me.
-
Okay to sum it up. What winwing offers here is a) The option that winwing considers the most realistic and useable. But which is still not like the real jet though. Because the full range of motion should reflect the full amout of possilbe input. I would call this approach a non-realistic hybrid b) which is like the early F16 days when the stick had not displacement or motion at all. Maybe like the Saitek X65F that I once owned, which was awful. c) must be just over sensitive and not useable, if you can really configure the stick to behave like it. That makes me seriously wonder if there is any reason that winwing sells those sticks if we have the RS FSSB around, except for the lot cheaper price for something that does not replicate the F16 stick correctly (at all). Might be interesting for space simulators though
-
Yeah, sorry. My bad usually I know the difference very well But does anyone know if the way the Winwing force sensing stick can be changed to a "realistic" continous movement like in the real jet? According to @void68there is option c) which is like in the real jet. Can someone confirm or disprove?
-
I dont want to abuse but I could find the readout for the afterburner state useful as the AB detent is different in every aircraft and I am setting up my AB detent per aircraft in Winwings Simapp Pro. How do you read the value out? ( Sorry for the thread hijack)
-
So what youre saying, or more or less confirming is, that RS got it right, or at least at right as you can get the behavior and movement of the real F16 stick with a FFB replica. Correct?
-
My problem is: The cursor enable button in the F16 is a ministick that also moves the radar cursor. If I press the cursor enable switch I accidentally move the mini stick too. What that does is that it re-enables the F16 radar in ACM slewable mode, which auto locks a bandit, which gives away my stealtiness. So can anyone help or point to a good tutorial on how I would do that? The idea is: On button depress-> Disable Axis on ministick On button release-> re-enable Axis on ministick Another idea is to assign the axis to an unbound axis on the hotas while depressed
-
Thanks. Easy when you know about that behavior. I did have VR Reset blank.
-
As title says. Numpad 5 is center view in 2D and resets VR view in VR. But I need Numpad5 for aircraft control, for example ICP5 in the F16. If I assign the function, I get the function of course but a VR view reset the same time. But I cant find where it is assigned to reset VR view. It is not in "general" and not in "UI layer" Can someone please give me a hint?
-
Not really sure about that. Possible for AI. But not what I experience on dogfight servers when I am too late pulling back the throttle and get shot, when missile would miss if I had throttled down earlier. Just my feeling.
-
Is there a tutorial or a good documentation on the simapp pro? Seems like I cant find anything on how to use or program it properly. What I am trying to do is to disable an axis input on button depress, and re-enable it on button release. I want to disable the mini stick axis on the F16EX throttle when pressing it ( Cursor enable) Reason is, when I depress curson enable to slew the Aim9 seeker a slight movement of the ministick re-enables the radar in ACM slewable mode and auto locking a bandit, giving away my stealtiness. Any help is welcome.
-
Try one of the aerobatics multiplayer servers. Its boring, non life threatening but thrilling the same time, when youre cruisin around in a jet and suddenly a human controlled WW2 aircraft crosses your way. Sometimes the weather and daytime is nicely set up as well on those servers.
-
Not really sure about it either. But for all the years I was thinking that the quarter of an inch movement refers to if the the full movement is reached the maximum input or controlsurface deflection is demanded. Hmm it feels like small movement and force on top is the first time I hear about this concept. Maybe we have an F16 maintainer around here who can clarify.
-
This is the most realistic option. I might need to look into the base, might need to be set up in some way. Didnt spend too much time with the Winwing base as the RS base felt correct all the time to me. At the moment with the Winwing force sensing base, I get movement, then it stops but still more pressure will give higher input. And it should not stop the movment until the full pressure wich means maximum output value is reached. As I said, I might need to look into the base.
-
It takes ages for the F16 engine to spin down. As I fight against human only: Try to predict when the bandit is going to fire the Fox2. Throttle to idle or at least at mil power 5 seconds before your predictive senses tell you that he's gonna fire. Have a good flare program, like 2 flares or more per second. And a quantity of 20 flares. Point at the bandit, so the missile cant see your exhaust. Loaded barrel roll, flare and pray.
-
The Winwing throttles and stick grips are good too. I just talk about the force sensing base from which the RS is the far superior one.
-
Also check for unwanted assigned axis. Often rudders are connected by default to other axis that make no sense at all.