Karon
-
Posts
1174 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by Karon
-
I had the same sensors problem a couple weeks after receiving the base. It took a couple days to speak with their engineer, a week for the delivery. Honestly impressive. They are great dealing with software and minor things but if you have to ship your hardware back.. well, good luck. My throttle has just been shipped though. I didn't care much about the delays, I expected them because they are expanding a lot quicker than it's safe to do. So, now I have two desk mounts, a grip and a throttle. I doubt I will even unpack it..
-
Don't tell me.. I have opened a ticket for a vibration issue on May 12 in my Base (bought in October 2017), ended up having to ship it back (stripped one cam screw no matter the soldering iron) and I'm still waiting. That's 89 days today, 3 months basically. I understand they prefer to repair and ship back but damn, patience is quickly running out. Can they just send a replacement back (maybe with a different or temporary firmware and then replace it once they received the faulty product, so no one can abuse) when they have the tracking number or the damaged/defective product? I have preordered the throttle as well but who cares about it when I have no stick? Another problem is that CS just says "don't worry, it's the support queue", without giving any ETA. How long this queue is?
-
Recommended gear for DCS
Karon replied to Aviator_George's topic in PC Hardware and Related Software
Warthog's grip is nice but gimbals are rubbish. Go for Virpil or VKB, they're an entirely different planet. -
Just to make it clear: I have pre-ordered the Throttle on day-1, do I need anything in order to receive che dust cover?
-
RAZBAM should aim for something that hasn't been done yet, such as C-130 et similia. Alternatively, heli (Bo-105 maybe?) or non-us aircrafts: we have enough us aircrafts and even more are coming or have been announced (such as F-14 and F-16). Since Russia apprently has a veto, I'd love to see more EU / Asian aircrafts.
-
@dburne: mate, out of curiosity, how long did it take for you to send back the base and get a replacement / fixed?
-
Don't tell me. It takes at least 4-7 to get a reply. Sometimes even more.
-
So, since my base is still dead (support, where are ya? :( ) I'm keeping myself busy and playing with Arduino and a 2.8" TFT. Virpil Desk Mount is definitely a great place to put additional controls and stuff, although by adding the TFT the whole thing it's a bit too tall for my taste. I should re-wire the column and add the TFT there probably. I'm really tempted to buy another Desk Mount to support my CH MFP and add controls to the mount itself.
-
Yep, tights. It prevents dust or anything else to fall in and can be easily adjusted. It's held in place by two rubber bands.
-
I use part of wife's old black collant. Cheap, easy, adjustable. Pic from my Arduino thread (sorry, I don't have a better one atm - my Virpil stuff and the T-50 are disassembled in a wardrobe): https://media.discordapp.net/attachments/268800846739800064/434280641496875008/IMG_20180316_133807.jpg ..so, has anyone managed to contact support? 4-5 days go between each reply (now 15 days and counting); at this rate I might get my problem fixed in 2019. I know they are busy but damn.. :noexpression:
-
Well, it's a bit late to try another approach now, unfortunately :( Question, how much threadlock have you found on your cams and screws?
-
Yep, I remember your posts when you had that problem and hopefully the solution will allow me to enjoy this great base again. To be completely honest I even thought about you before starting the unscrewing operations :D I had a different problem a few months ago (sensor dead), they verified it via Skype and Teamviewer and eventually shipped me a new pair of sensors. I guess they are busy with orders and with the wider clientele although I have opened the ticket on May 12, it's almost two weeks ago.
-
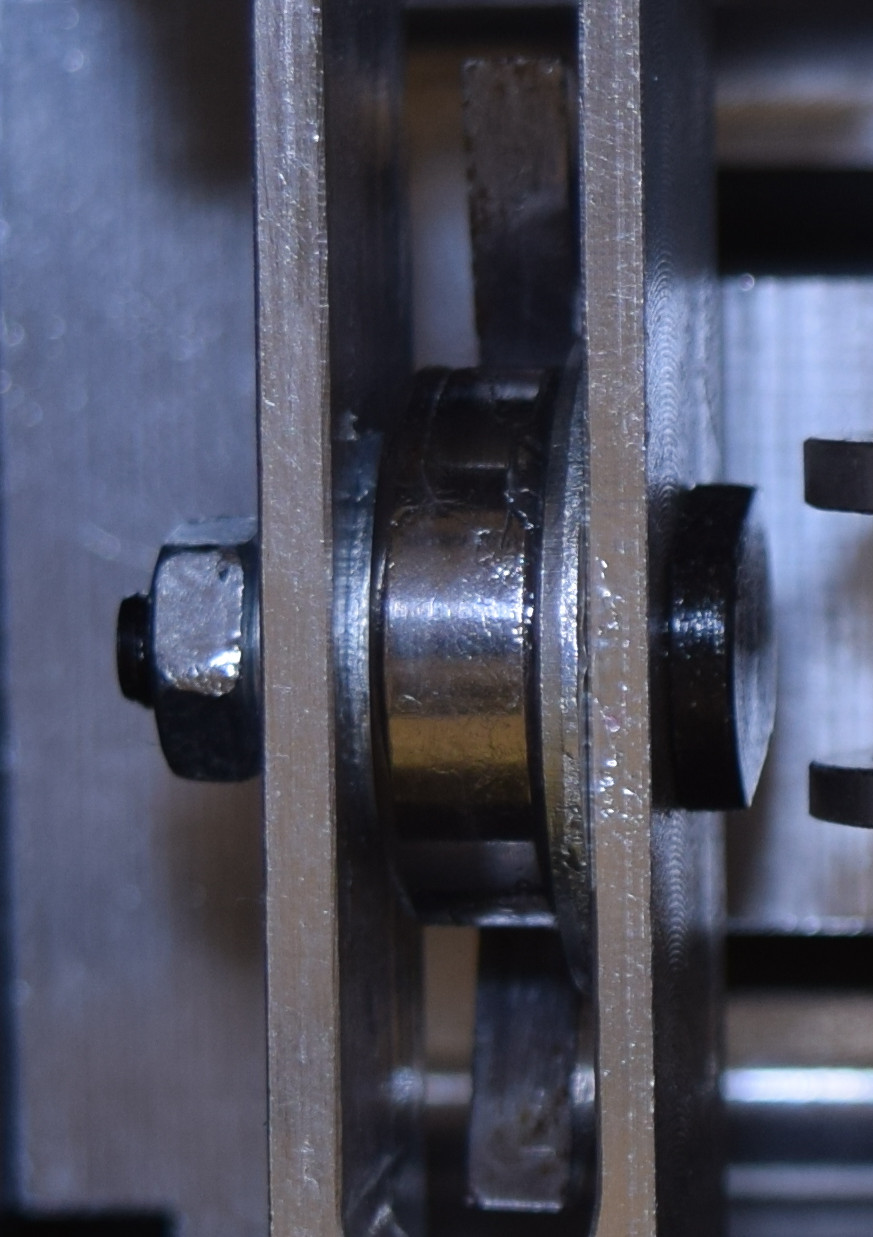
Update on my problem with vibrations and roughness on fast movements. I can't fly in this period so I contacted support about it and they asked if I have tried the cams they have sent me later (assuming I have already reported the issue). I decided to mount one of the other pairs of cams and do some tests. I dreaded this moment, my base is old (SN ~200) and I know some people had issues with the screws. Guess what, I have stripped one. For all of them I have used the same procedure: pre-heat with a soldering iron the slowly but firmly unscrew. The 2 screws holding the vertical axis came out fairly easily although damaged (the amount of thread lock though – see pic). Problems came with the horizontal axis, I knew that being screwed into a bigger body of metal made heating difficult, I didn't expect to irremediably damage the last screw. The third screw came fairly easily: it looks very different from the other tree and wasn't damaged during the process (see pic). I tried then to get the damaged screw with an extractor but it broke. On the last pic you see the amount of thread lock still stuck on the cam itself. I have updated support but no answers in 5 days. I wrote Cyph3r and hopefully someone will come out with a solution asap. I know they are busy but receiving the throttle I have pre-ordered without being able to fly will definitely sucks :noexpression:

-
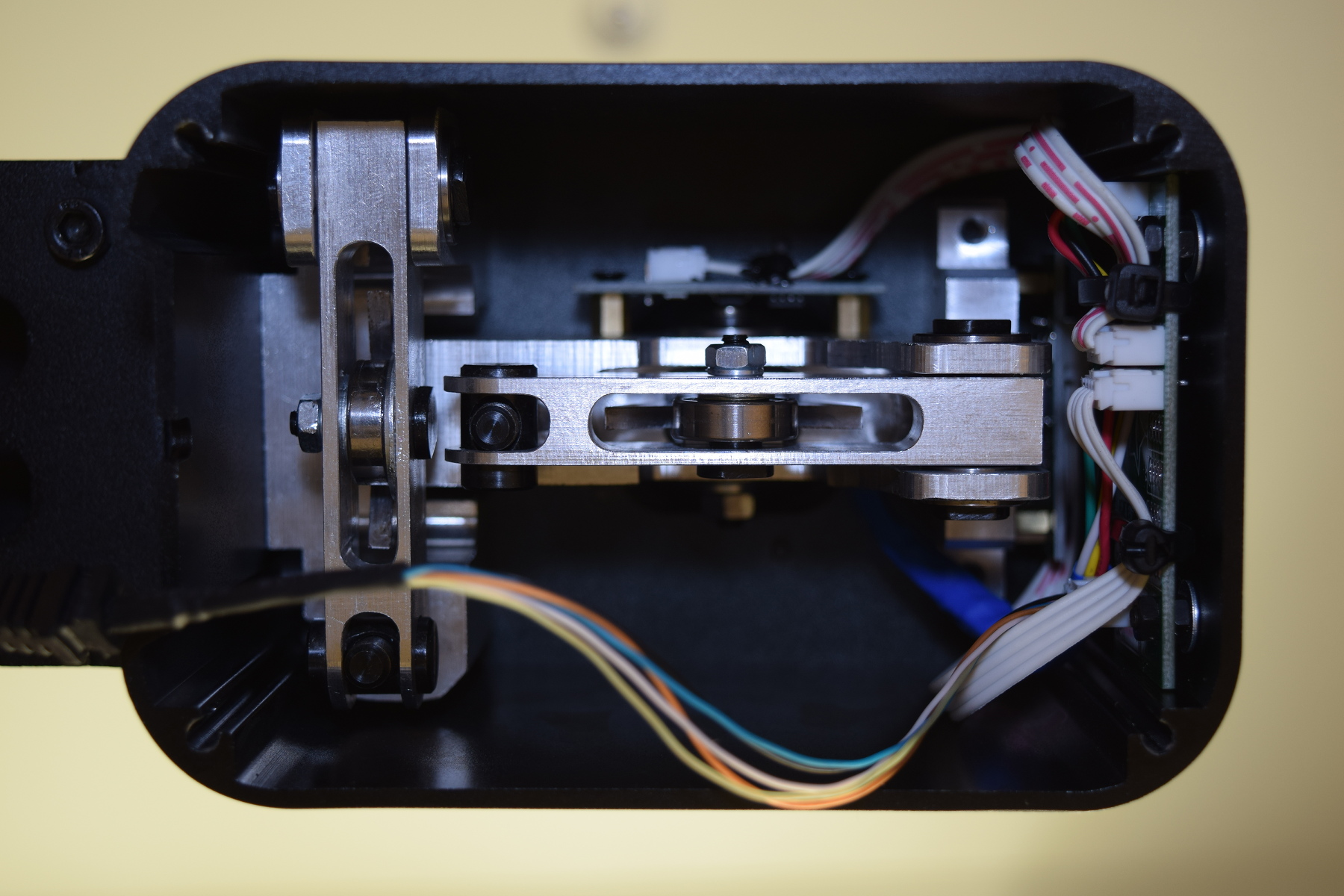
I've finally took a couple pics of my base and the solution I ended up with. In DCS I'm a rotor-head hence stick movements are usually smooth and limited so I haven't noticed the issues until I started flying fixed wings, especially WW2 in both DCS and Il2. What happens is: when i hard turn in any direction (happens on the vertical axis as well but it's limited), I have strong vibrations and the feeling on the grip is the same you have on the steering wheel when driving on cobblestone. This doesn't happen when pulling or turning lightly. I noticed that, during hard pulls, the ball bearing moves from its normal position and I suspect it’s subject to some sort of torque effect, perpendicular to the mast it is mounted on; hence I have massive vibrations on the grip. The washer prevents this movement and the feeling is much, much better to the point that I forgot about this issue at all for weeks. It is not perfect thought because the bearing can still move a few tenths/mm hence on hard turns you can still feel something, although even lesser than the effect on the vertical axis (I have applied no washer there). I wouldn't bother on a heli, but it's an annoying feeling when dogfighting (and the F/A-18 is close!). My guess is the cams are not perfect: the additional I have received are well polished and black, the one mounted on the base are not. The latter' surface it's probably not perfectly even, probably slightly sloping, this causes the ball bearings to "slip aside" and induces vibrations. Has anyone else have or had similar issues? I'm dropping an email to support as well. I already dealt with them when one of my sensors stopped working and they've been amazing. Issues aside, has anyone tried the cosmos cams with rotary wings? The sound great although not available ATM. I’m looking for feedbacks before buying them. Finally, -8 days until the Throttle becomes available. Can't wait to try mine!
-
No issues here as well; don't use any wrench mate.
-
Hey mate. The T-50 can't stay where you leave it, the VKB has something similar AFAIK. My T50 has soft springs and default cams. Also, the springs are as loose as possible so moving and holding it in place takes literally no effort. I was thinking about the new Cosmo cams but I play different games as well..
-
Controls box for Virpil Desk Mount (Arduino)
Karon replied to Karon's topic in PC Hardware and Related Software
I bought those boxes from amazon but you can get them amost anywhere. IIRC the desk mount is ~70mm wide. -
Controls box for Virpil Desk Mount (Arduino)
Karon replied to Karon's topic in PC Hardware and Related Software
Yep it's an ancient CH MFP. @Hansolo: I decided to use momentary switches only, it's a more flexible solution for different modules and I have no issues with DCS. You can use non momentary switches though (I haven't tried but I guess you can modify the firmware in order to have them send a signal for a defined period - such as 50ms). EDIT: I'll stress it again: my goal was a flexible, cheap solution independent from 3rd party software (such as DCS bios) because I plan to use it in Il2, Star Citizen and every game that can benefit from additional controls. -
No idea. Any way, considering I realised the issues after more than 6 months, is something really not noticeble unless in some situations. I wonder if the T-50 is not making me too "picky": my old CH Fighterstick had a deadzone of 2-3mm due to tear&wear and I've never bother to change its pots :D I might drop an email to Mr Cypher, so he's aware of the issue in case it something else and gets worse later.
-
Controls box for Virpil Desk Mount (Arduino)
Karon replied to Karon's topic in PC Hardware and Related Software
If you use the sketch made by the guy I've linked (maybe give him a +1 :) ) you really don't need anything else. Code is C, as you can see here: https://github.com/AM-STUDIO/32-FUNCTION-BUTTON-BOX/blob/master/ARDUINO_BUTTON_BOXV2.ino I have written my own version, changed and adjusted pins and other things such as timers: encoders send an input of 50ms by defaul, it's too long if you aim to controls HUD/HMS/ABRIS brightness for instance. 35 or 40 are a better spot, although the more encoders you have, the higher that timer must be. You don't need any coding skills though and if need any help, just ask :) These are two parts you will probably change if you want more or less buttons or encoders: byte buttons[NUMROWS][NUMCOLS] = { {0,1,2,3,4}, {5,6,7,8,9}, {10,11,12,13,14}, {15,16,17,18,19}, {20,21,22,23}, }; rotariesdef rotaries[NUMROTARIES] { {0,1,24,25,0}, {2,3,26,27,0}, {4,5,28,29,0}, {6,7,30,31,0}, };The meaning of those values is in the scruct. Encoders for example are defined by: struct rotariesdef { byte pin1; byte pin2; int ccwchar; int cwchar; volatile unsigned char state; };So, the first line of the rotariesdef type var rotaries ({0,1,24,25,0}) is: 0 → first pin soldered; 1 → second pin soldered; 24 → the input sent to the PC when turning counter clockwise; 25 → the input sent to the PC when turning clockwise; 0 → it's status, zero by default. So, you define that array as {0,1,1,2,0}, it will be: soldere to pin 0 and 1 of Arduino and seen by DCS and the PC as button 1 and 2 of your peripheral. This is the definition of the button matrix: byte rowPins[NUMROWS] = {21,20,19,18,15}; byte colPins[NUMCOLS] = {14,16,10,9,8}; just change the values according to what you have soldered. Exempli gratia, my radio box uses a 3x3 (total 9 buttons). Values are something like (I don't remember atm but it doesn't matter for the sake of this example): byte rowPins[NUMROWS] = {21,20,19}; byte colPins[NUMCOLS] = {18,15,14}; The flow of the program is very simple: it's a loop that checks the status of the I/O pins of arduino and send a message via USB to the PC if something changes. No mate, I don't plan to build and sell them (lack of spare time + lazyness :P). I'm happy to help you though, you really don't any need programming skill (see the top part of this reply). -
Considering that this problem has totally disappeared and my base is one of the first batch (fear the old treadlock!), I'm not entirely sure I want to venture into a cam swap. Since I fly rotary only, I wonder if the new cams make the T-50 even more neat.
-
UPDATE APRIL 2019 Did some upgrades on my setup, two additional Arduino Leonardo-based new boxes. I'm still waiting for the delivery of the last encoders. The Radar box (left of the UFC) has 121 buttons; the Master Switch doubles the base number and, depending on its status, some 3-way momentary work as 3-way toggles for their in-game equivalent since many buttons bindings are still missin in the RIO seat. The top "flat" box has 67 buttons at the moment but I still had to add the 4 missing encoders (should be delivered shortly). I didn't add any Master Switch since it would have exceed the HID limit of 128 buttons. I thought about "masking" some buttons as POV but still.. I tested the box with friends and on Hoggit and I'm quite happy about it, makes RIOing much faster and efficient. UPDATE FEBRUARY 2019 7" LCD screen up and running! Definitely very nice for ABRIS. Plus, added the 3rd MFD. UPDATE OCTOBER 2018 UFC done, I've found a 7" 800x600 LCD monitor and I plan to use it for the Shkval. This is the current status of my setup: I'm quite happy about the UFC, I don't care about the F/A-18 but I can now easily control both the PVI-800 and the ABRIS and, by toggling the master mode, easily use the PRTz. UPDATE 23/09/2018 I've decided to build a F/A-18 UFC. I don't know why, I don't like fixed wing.. Anyway, I've build an auxiliary panel for lights & co. At the moment it supports 70 buttons but I can easily expand it even more. This is the test of the buttons: This is how my desk looks like at the moment: UPDATE 01/08/2018 I'm about to build my 3rd control box. It will use tension dividers and other simple circuits to support different functions such as 2 and 3-way latched and momentary buttons. Once it's done I will update the thread. I have applied the tension divider to the radio box already to support 2x 3-way non momentary switches: Meanwhile I played with DCS-BIOS a bit to build a TFT based on Arduino Uno: /******************************************************************************************/ /******************************************************************************************/ This thread is about Arduino and how easy is to create a control boxes fitted with whatever type of control you want: push-buttons, momentary buttons, 2/3 way switches, rotary encoders, etc. I've promised in the Vipil T-50 thread that I was going to open this thread like a month ago but never had time (or, probably, I've just forgot :P ) Virpil Desk Mount is a massive piece of metal. It's heavy, big and.. empty. In my strugge to avoid using the mouse at all costs, I thought it'd be cool to convert the empty area inside the Desk Mount and add some controls there. I though about using a 8/16 bits microcontroller since I've worked on them for a decade, then I found Mr Arduino. A quick research and google suggested me this video.. Eureka! That video is the perfect place to start: it was easy to understand, it has both the source code and the libraries. The idea is to configure Arduino I/O pins as inputs and use them to control a wide range of switches and buttons by means of a button matrix. Moreover, it also supports rotary encoders. The sketch linked in the video doesn't support potentiometers. PLANNING Since the control box is for DCS I decided to use momentary-switches. I have a Saitek TPM which mounts 9x 2-way non-momentary switches and I had to use DCS Bios in order to make them work (I reckon Black Shark 1 hardly digested non-momentary buttons, I don't know if 2.5 / 1.5.x are different) and emulate a keyboard. Hence I went for momentary switches + 4 encoders. By using this firmware, Arduino is seen by windows as a gaming peripheral, not different from any other commercial joystick. It allows for direct mapping in DCS without the necessity of emulating the keyboard (this also mean no additional programs running in background)! BOXES DETAILS I have built two control boxes, one is held into Virpil's desk mount for their MongoosT-50, the other box is a radio/lights controls box with 6 rotaries. Unfortunately when I moved abroad I didn't carry all my DIY stuff with me, so I had to buy everything again. If you have a drill, soldering iron, wires, boxes and screws you have already saved a good amount of money. “Virpil’s” control box is fundamentally a copy-paste of the video aforementioned. I have modified the wiring and added two standard pushbuttons + a few 3-way momentary switches because I didn’t like push-buttons encoders here. Software-wise, it’s basically the same. It has: - 9x 3-way momentary switches; - 4x rotary encoders; - 6x standard momentary buttons. The second box's wiring is even simpler, having a smaller matrix (3×3→9 buttons). It mounts: - 4x rotary encoders; - 2x rotary encoders + push buttons; - 3x standard momentary buttons; - 3x 3-way momentary switches. PICS NOTE: I'll add some decent pics later on. These are low quality, quite old and the encoders caps were still missing. "Controls Column" Soldering! (the only pic with caps atm) "Radio Box" NOTE: I don't have proper tools to cut the plastic and the result is far from ideal. Any way, as long as it works, I'm happy :) This pic was still WIP, I was waiting for the delivery of caps and the last 3-way momentary push-button. Complete setup MAPPING I've linked a couple of my setups in this post: https://forums.eagle.ru/showpost.php?p=3458989&postcount=1963 Those configs are actually quite old, I have ordered Virpil's Throttle and I'm waiting for its delivery (it will take ±40 days at least, unfortunately) before changing them. Unfortunately the Shark has some poor controls options by default (I'll get a beer to whoever manages to add some more via lua!) and the Harrier is still WIP. As already mentioned, Arduino is seen by windows and DCS as any other gaming device. You can assign controls right into the Controls Options menu in-game. No other programs or keyboard emulators are required.
-
I might have found a flaw in the design of the ball bearings area, or maybe it's just my cams. Next time I open the base I'll take a pic. This actually happened a few months ago but I forgot to post about it :doh: I haven't noticed it before because I fly the Ka-50 or other rotary-wings most of the times, so movements are smooth and fairly slow. I have reinstalled Il2 and the stress on the stick is much pronounced. What happen is: during hard or fast turns, the stick behaves as if it was on a sheet of sand paper: vibrations, rough movement and weird noises. I have opened the base and did some tests. I have fixed it by adding a washer (see the edited pic attached, the red line is where I've placed the washer). What I think happens is that the cam is not perfectly squared (I mean the ∠ between its flat and vertical surfaces is not exacly 90 deg) or that the ball bearing is somehow loose. This means that, when I pull hard (NOTE: I use soft springs and I keep them very, very loose so the force applied to mechanic is quite small) the ball bearing is subject of some sort of torque force perpendicular to the mast and thus it's unable to provide a smooth transition. By adding an additional big washer adiacent to the ball bearing I basically keep it in place so it doens't twist anymore and it's much much much better. I'm not really sure what I wrote is understandable, I'll take some pics next time I open my base. EDIT> also, finally opened the thread about Arduino stuff for Virpil Desk Mount: https://forums.eagle.ru/showthread.php?t=206778
-
..and actually it's very easy to make! I keep forgetting to open a dedicated thread about it. I promise I'll do it sooner or later (I should copyright it :D ). That's how my "workplace" looks like now (encoders caps are missing in this pic though - sorry for the awful quality): Happy to help :) There are actually two more reasons why the Harrier profile it's not updated: 1- I've joined a vSquadron (132nd), we use UniversRadio and I'm waiting for radios to be properly implemented in the AV-8B before setting up the controls; 2- I've ordered Virpil's throttle, it's very different from the TWCS: for instance it has a 4-way + push hat so I don't have to split the TDC over two different controls.
-
I love the thumb pushbutton: being a rotor head, that pushbutton is the perfect trimmer. Sometimes I hold it for minutes and I don't even realize it :) I understand that for fixed wings an additional 4-way switch sounds better though. I have attached a couple of configs. Neither of them is actually updated 'cause I got rid of the TPM for a Saitek Quadrant. The Harrier is the oldest, I didn't even bother to config my Arduino stuff for it (I'm waiting for new updates, Radios especially). I think I'll maintain the T-50 config though. Note: The "Radio PTT" is for UniversRadio / Simple Radio. I can't wait for the release of Virpil's throttle, obv I've already pre-ordered it :) EDIT: that's one of my Arduino stuff, "embedded" into Virpil's Desk Mount. The post is quite old, I've finished it now and added 4 rotary encoders: https://forums.eagle.ru/showthread.php?p=3415748#post3415748