Logan54
-
Posts
958 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Logan54
-
если что, то вот Ми-35М с хреновой оптикой и старым вооружением

-
Тогда почему игрок способен сфокусироваться на приборах?) Отступление от реала, которое вынуждает игрока в ОНВ смотреть приборы (реализм?) порождает в итоге весь этот срач) Ми-24 не дневной вертолет. Просто кабина не адаптирована под ОНВ. Сами ОНВ не являются частью вертолета как прицел или прибор наведения. ОНВ это элемент экипировки летчика. В итоге в одной армии мы имеем один тип ОНВ для Ми-8, второй тип ОНВ для Ми-24, и третий тип ОНВ для Ка-50, то есть никакой унификации. Конечно легче сказать что это все приведено к реалу, ну хорошо, пусть будет так.
-
Понимаю, Вам не просто) Но если бы у 24ки не было десантного отделения, который легко переоборудуется в грузовую кабину уборкой сидушки по центру, я бы не предлагал эту идею) Впрочем, вопрос был адресаван не Вам)
-
Так я за навигацию и говорю) Какая может быть навигация, если вместо того чтобы долететь до района БД, приходится постоянно поднастраивать яркость очков то меньше то больше? это я так понимаю, реализм по мнению ЕД-настройка яркости?) С засветками в кабине я не спорил, они могут быть в неадаптированной кабине, но то что текущие очки имеют самые ограниченные возможности по обнаружению гор перед собой (я не о БП, я просто о наблюдении за подстилающей поверхностью), с этим мало кто будет спорить)) Сделать ОНВ современного образца по типу ГЕО-1, чтобы они были на всех вертолетах, пффф, зачем, летайте на эшелоне с грачами)) Зачем этот бонус в виде недо-ОНВ, если он не дееспособен?
-
метода, ради которой нужны дополнительные грачи с дополнительными САБами и не дай Бог пво проснется)) Ну да, проще ж игроку искать выход, нежели привести ОНВ к приемлемому знаменателю)
-
Длина десантного отделения Ми-24 составляет 2.5м. Длинна ракет 9М120 в ТПК составляет 1.83м, вес ракеты в ТПК примерно 50кг. Что мешает взять на борт комплект из 8 ПТУРов для перезарядки составом экипажа (бортовой+Петрович) и через меню Ф10 выполнить смену пустых ТПК на те что в наличии в десантном отделении. Естесственно наличие Корда будет в такой конфигурации невозможно, как и десантирование л/с, катапультантов. Но сама возможность выполнять перевозку грузов до 1.5 тонн внутри грузовой кабины имеется. Эта возможность увеличит потенциал вертолета. Все вертолеты могут перезаряжаться в поле. Масса груза типа 8* ПТУР Атака составит 400кг. Уверен, бортовой техник будет в силах правильно закрепить ТПК внутри отделения) Так то можно даже на выбор игрока туда НАРы тоже погрузить, в общем, к размышлению разработчиков) К этому пункту можно еще добавить возможность "перекинуть" с поврежденного крыла на исправное те ПТУРы что там стояли) так же где-нибудь в поле силами Петровича и бортового техника)
-
Так это уже день деньской будет) Бывает такое, когда хочется летать без костылей. Но похоже, мы не дождемся нормального ОНВ на этот модуль
-
Если уж совсем по правде, то ОНВ имеют регулируемую фокусировку которую настраивает летчик таким образом, чтобы видеть земную поверхность, а это примерно от 100м и дальше, в полете будет где то на 1.5-2км. С такой фокусировкой приборы в кабине при любой освещенности будут нечитаемы в принципе, потому что ОНВ сделаны для закабинного пространства) но тогда чтобы видеть приборы, нужно иметь настройку подъема очков, которой нет конечно) поэтому у нас в ДКС все хорошо читаемо в ОНВ) А засветки достаточно дружелюбные) с ними все норм)кроме контурных огней, которые сейчас светят во все стороны одинаково)
-

Option to add/remove IR covers from communication menu.
Logan54 replied to PickleMonster's topic in DCS: Mi-24P Hind
+1 ED should let us rearm IR suppressors on the ground/or on airfield. Razorback did cool mod but seems to me we need to have item in reload menu -
Usually, I m not waiting jets below me, because I hold 10meters or so)
-
-
Является ли текущая засветка ОНВ контурными огнями нормальным явлением? Если смотреть на фото, то дальняя сторона диска НВ не имеет никакого подсвета.
-
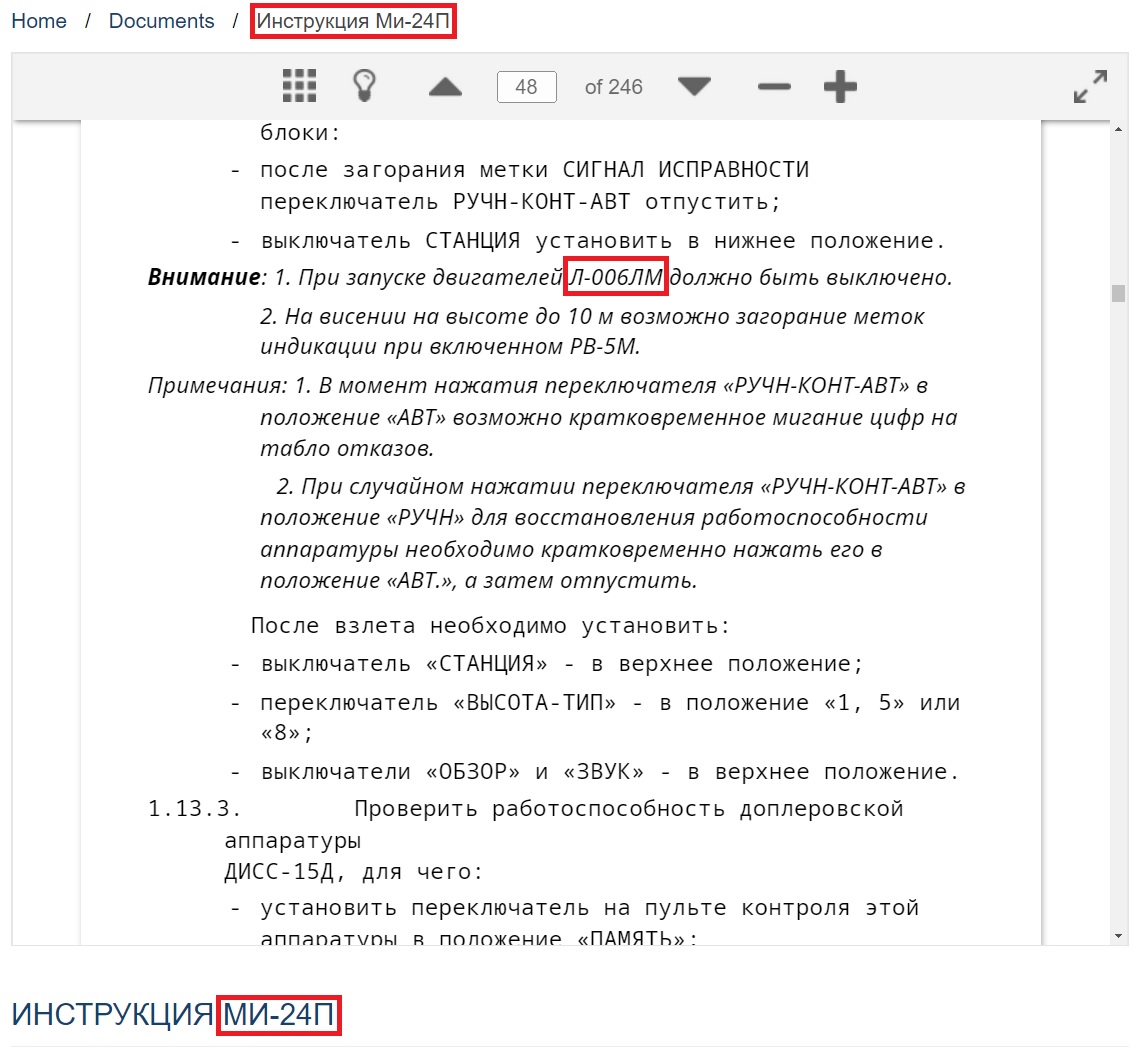
L006LM its not "Lipa"this is "Beryoza" RWR, its mounted left and right near the engines, "Beryoza" in use on russian Hinds and there info in operating instruction about it. Lipa is L-166
-
@BIGNEWY In real Mi-24P documentation mentioned about using L006LM. Why ED hiding to realise it? Is this super weapon as AIM-120C or 9X? Also a lot of Mi-24P with L006LM photos with russian board numbers that used as Ministy of Defence, so as Ministry of Internal Affairs. What the main reason of ED`s decision not to include it?
-
А можно сделать комбинацию клавиш на "показать/скрыть подсказки" это те, что всплывают при наведении мыши на переключатели? Я понимаю, что можно их убрать в основных настройках, но имхо при изучении одного модуля и постоянных полетов на изученном это подбешивает), иметь возможность "очистить" кокпит это реально хорошо)
-
чертов гений
-
И все же
-
В общем я нашел интересующую меня информацию. Если верить схеме, то пружинный механизм перегонки находится на самом КАУ, не указано, что он перегоняет сами педали, и тут вопрос, как он вообще работает?
-
Да как бы споров вокруг педалей многовато, и несогласных с перегонкой тоже)) Вот и решил капнуть, но по ходу нужно глубже копать)) Кстати, тут уже оба форума "Березу" просят, а им в ответ мол "Березы на Ми-24П не было и точка")) А тут вдруг вижу отсылку на Ми-35П, немного даже улыбнул данный факт) Чуть погуглив фразой "Ми-24 перегонка педалей" вышел на след гидроусилителя РА-60 (который на Ми-8), и вот он реально перегоняет, но именно с Ми-24 нигде ассоциаций не нашел...
-
а как именно СДВ-5000-ОА воздействует на перегонку? тут просто не написано видимо, ну и информацию я взял из источника по Ми-26, но в схеме нет никакого возвратного элемента
-
Моя фраза "вырвана" из раздела 7 "Аэродинамика и динамика полета" ИЭ вертолета Ми-24В. Конечно жаль, что не П, но это конкретный документ. Так вот на что ссылается в этом вопросе ЕД, я пока что не понял. в ИЭ САУ-В24-1 уделён 1 разворот, и нигде не указано про эту "перегонку". Кроме того, есть четкое понятие (указанное мной выше), что автопилот не вносит корректировки в органы управления. САУ это всеобъемлющее понятие, которое собирает информацию о том куда летит вертолет (датчики), что от него хочет летчик(ОУ+пульт), имеет несколько режимов таких как висение и маршрут, под режимы, помогающие стабилизировать скорость, направление и высоту, но где в этом перечне устройство (и как оно называется?), которое "перекачивает" педали? Я не нашел, может плохо искал. Или не там ищу, направьте, если не сложно
-
А есть ли вообще перегонка?
-
Согласен, что не соответствует, поэтому и попросил фото, где будет видно целиком всю сетку, у меня к сожалению нет сейчас под рукой Ми-24, так бы сам сделал) Извиняюсь за флуд, если есть возможность, направьте в ту ветку, которая для этого подойдет.
-
Несоответствие сетки ПН и той что я увидел по ТВ, это хотелка?
-
1. Отключи перегонку, педали с возвратом в центр, отключи триммирование педалей, забинди кнопку U (вкл/выкл микровыключатели). 2. Включи канал направления, нажми U (МВ зажат, бленкер канала направления в центре) для отключения канала во время взлета/посадки, после взлета движением педалей и РУ доверни на нужный курс. Вывод должен быть на курс + 10 градусов в сторону нажатой педали (примерно). Нажми U (МВ отжат, канал направления активен) и одновременно верни педали в центр, за счет запаса 10 градусов, ты довернешь ровно на нужный курс. 3. Для виражей: нажми U (МВ нажат), с одновременным отклонением РУ в сторону разворота, чуть додави внутреннюю педаль, и держи её сохраняя шарик в центре. Ничего кроме РУ трогать в развороте не нужно. Для вывода одновременно с уменьшением крена сбалансируй педалями и при выводе на прямолинейный участок нажми U (МВ отжат), верни педали в центр, мне такое помогло летать)