uboats
-
Posts
7127 -
Joined
-
Last visited
-
Days Won
11





Recent Profile Visitors
17427 profile views

-
wmd7 has no A/A as far as our SME knows.
-
CM-802AKG in NAR mode doesn't respond to input when DL slew rate is 0.7
uboats replied to tekwoj's topic in Bugs and Problems
@JG54_NF2 Please take a look -
There is a problem with the dispersion position of GB6 submunitions
uboats replied to supersylph's topic in Bugs and Problems
any trk? if you use default open alt, it should be ok since last update @JG54_NF2 -
please dont say quick to a man
-
alright, let's see in next update

-
pl11b turns to an ARH?
-
good to know, will try it regarding, masking and external animation i will check with another programmer.
-
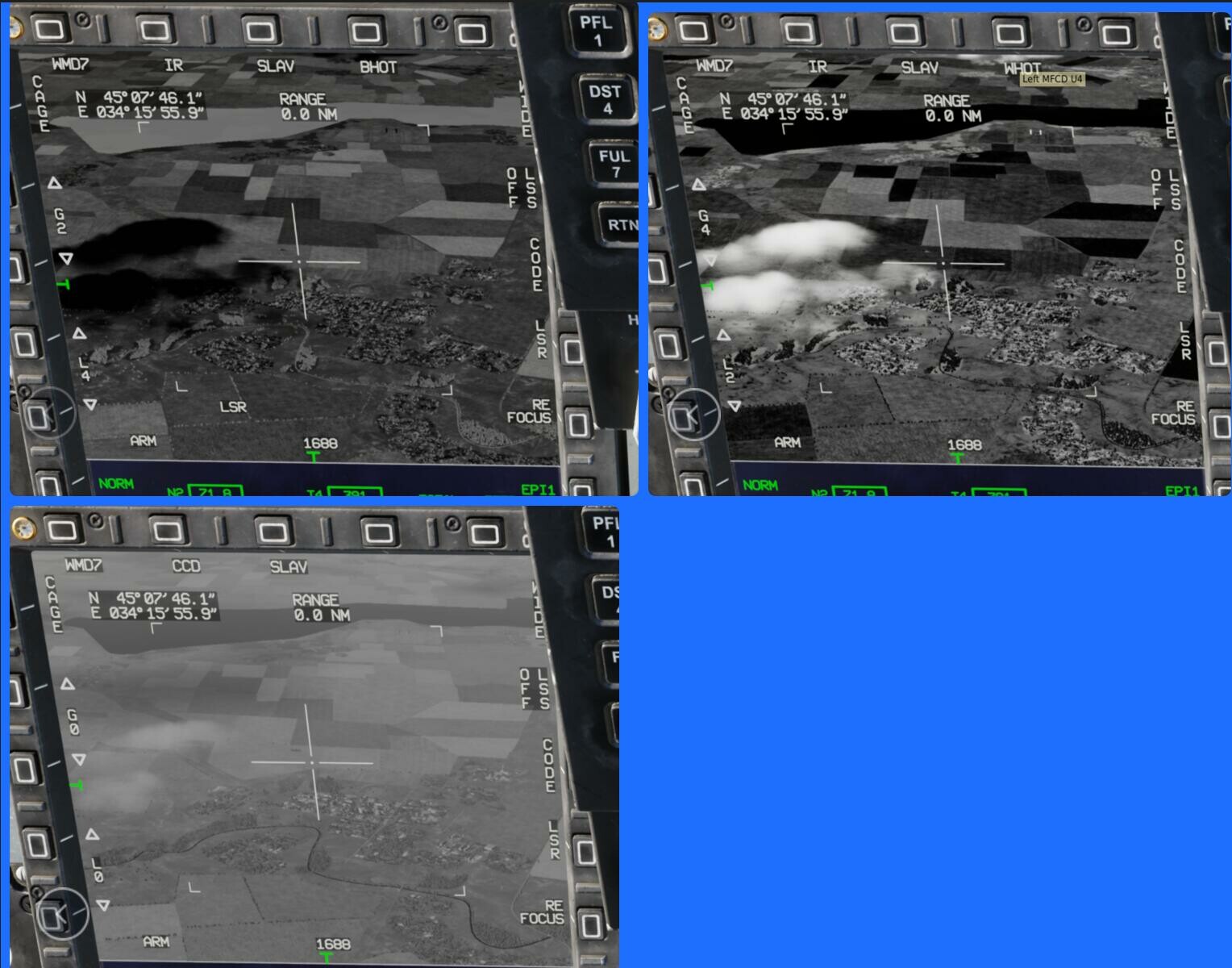
it's a trade-off. there are several image type provided by dcs, tv color, ir, tv bw derived from ir, new flir not sure you still remember the bug that sometimes the whole monitor was covered by big black plate (not only jf17 had this issue, i remember hornet had/has it too)? this was caused by using tv color (although post processed to bw), and this affect the game experience so we have to use tv bw derived from ir which looks quite similar to new flir.
-
it's a pain now, will rework its script later. the root cause was making it a player controllable unit. thinking about removing control feature and removing the EO unit
-
if the accuracy for bluefor is fine, then let's wait and see what ED will do
-
thanks a lot for the test and the results look interesting. since I have a hardcore CEP based on align quality beyond jsow scheme, if there's 3m bias, it's reasonable, because it's not that perfect accurate. but now I realize that the warheads effect is limited, to destroy a unit in game, direct hit is the onlg option. hmmmm, will check the code later and see what i can do
-
@sylkhan any issue for ld10, please share it here
-
Where is the JF-17 official manual? I can only find a chuck's guide.
uboats replied to Napillo's topic in JF-17 Thunder
we found a translator to translate CN to EN last year, but after two- three months, he said he had no time and quit, and we didnt see anything from him yet. still finding a new translator -
"If you have bombs on dual rack or different bomb type (250 & 500) you will need 2 profiles" for dual rack, it's still same weapon type, so 1 profile should work "If you look at the f-18 JDAM/Jsow they are perfectly acurate, look at 3.40 mn, our ls6 & GB-6 are not." I dont have enough space to install other maps, IIUC, this is the issue you want to report for ls-6 and gb-6 he? can you please recreate a map on caucasus and provide trk/acmi together? if the 3m bias is the issue, do you still remember when it can accurately hit the target? ED changed the JSOW-C scheme a bit between Nov and Dec, we followed to update which include some accuracy related i believe.
-
that's different story, like the scheme's terrain following guidance has some issue