FIN_Centurion1
-
Posts
78 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by FIN_Centurion1
-
Just ordered my Reverb today, so stoked. Should have it by next week I hope. Upgrading from a CV1. Hoping for a fairly massive improvement in clarity!
-
We need a force feedback base badly...
FIN_Centurion1 replied to TaliG's topic in PC Hardware and Related Software
Lovely project idea, I'd be eager to help in any way I can (though probably not much). I know there are some people on the HOTAS discord DIY channel thinking about force feedback gimbal design but I haven't seen any conrete designs or proposals yet. -
I'm as hopeful for the A-6E as for the J-35 Draken. Both are (AI) models in production and I can't help thinking they probably got some good specs on both of those birds. The Draken is a good fit with the viggen and a natural opponent for the MiG-19 and 21. The A-6E is a great companion to the Tomcat and good fit for DCS, the depth of the systems is probably right up Heatblurs alley. I'm sort of leaning more towards the Draken really because it must be easier to make than the avionics heavy Intruder - and it looks so bad ass.
-
Well played sir, and great video. I'm not a fan of the CE2 myself but I can appreciate it's qualities
-
The Corsair stuff is just insanely good looking! Might be the first warbird I pick up for DCS!
-
Absolutely brilliant. Gotta say I will probably pick this up day 1, which I hadn't expected to. This will be a nice change of pace from the Hornet!
-
Smudge’s video review of the C-101CC
FIN_Centurion1 replied to Rudel_chw's topic in DCS: C-101 AvioJet
It looks kinda weird to have the Magic missile straight on the pylon without launch rails. WIP? Can't wait to get home and try the cc. -
Well yes, the book gives a clear picture that this is based on analysis of Iranian pilots. Still, before someone interviews a senior engineer of this project we will not know for sure. Or are there more definitive sources available to the French speaking?
-
Tom Cooper's book Iranian F14 Tomcat units in combat claims the EQ6 variant was R530D capable and that indeed the Iraqis scored three kills with it on the closing moments of the war. Indeed there was tremendous development of the Iraqi f.1 variants from EQ 1 to 6, I believe the French/Dassault used this contract to test their latest stuff. So that they would like to combat prove the 530D is logical. Additionally, the Iraqi mirages were second to none in capability, like Exocet, As20L, advanced rwr etc
-
The SAAF fielded both the F.1cz and AZ variant, where the CZ was an interceptor/fighter capable of fielding two Magics and two R.530 sarh missiles.These missiles were by all accounts quite worthless. The CZ also had a Cyrano IV radar while the AZ attack variant had not. It instead had a moving map type display in the cockpit and more advanced ground attack avionics. The Mirage f.1 was definitely a 3rd gen fighter. There was a pitch to mate the airframe to a modern turbofan like the Snecma m53 or Rd-33, in both cases the performance gains were substantial, with electronics upgrades would have easily made the f 1 equivalent to a fourth gen.
-
Fantastic! Looking forward to seeing the various cool middle eastern paintjobs!
-
Afaik only the Iraqi EQ 5 and 6 variants carried the exocet. These also sported advanced rwr and generally more advanced avionics than other f.1 variants. They could also carry the much improved m530D sarh missile. Detailed specs on these late Iraqi birds are hard to come by, though I am sure there are some engineers over at Dassault that knows :)
-
Really looking forward to this module, always liked the lines of the 19. F-8 crusader would be a cool opponent *wink wink* Gotta say the cold war era has huge appeal to me and I know I'm not alone
-
I know this question has come up before in this thread but I have some questions about cables I've been wondering 1) Should every single cable be shielded, or is it only longer stretches of cables that need to be shielded? 2) What is a good type of single shielded cable (preferably with some kind of international name) 3) How long cables can you get away with, provided you use shielded cables of a reasonable thickness? Is 0,5m fine? 4) I wanted to use a single Arduino to drive both my rudder pedals and joystick gimbal as they are permanently attached to my home cockpit, but for ease of service I thought it might be a good idea to use female DB15 vga connectors close to the sensors and running VGA cables of appropriate length from the device to the Arduino. From my understanding VGA cables are shielded? Or is there a better cable type?
-
Those look cool, but I am not at all familiar with this kind of damper, is the damping linear?
-
Thanks all for your kind words! This gentleman down under has uploaded a video where he services this type of universal steering damper. Following his guidelines I might first try to just have less oil in the system to get a lesser damping force, and if that does not work ill take it further apart and see if there are some holes you can enlarge to lessen damping.
-
I got them off eBay, they are pretty cheap motorcycle steering dampers. They are a bit too stiff for my liking and "stick" in place, so I am thinking about trying to open one up and see if they can be tweaked.
-
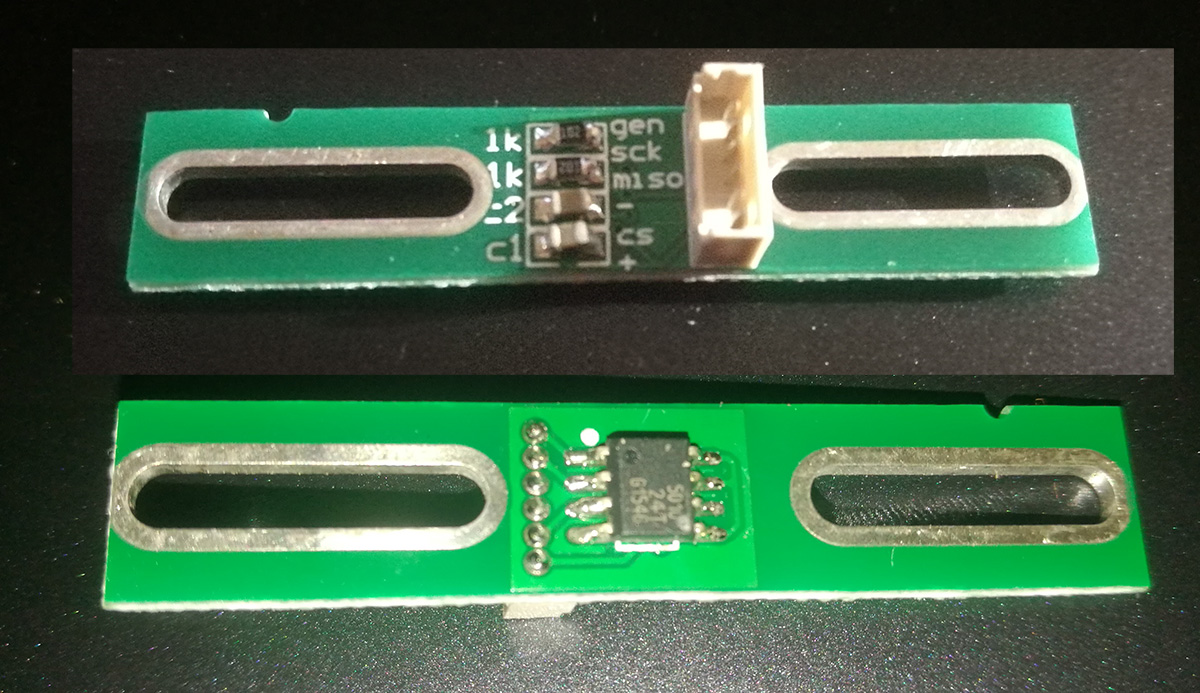
Since Sokol so kindly asked I thought I'd share my latest addition to my simming gear. The reason why I made this is I was getting sick of my old Saitek X45 hotas, especially the joystick gimbal which is prone to sticking and obviously has 0% axis separation, making exercises like A2A refueling a nightmare. Wiser from my previous DIY adventures I wanted to use a better material for prototyping and settled for acrylic plastic sheets that can be had for cheap and are easy* to work on. Since a friend of mine has a CNC machine I figured I could prototype on the cheap. I elected to use 6mm thick Acrylic, and generally feel ok with that decision. (* While easy on the tools, the acrylic goes FUBAR pretty fast if you let the heat get out of hand. As such, you need to take your good old time while machining it or use ample cooling.) The basic design is far from my own, I have looked heavily at designs by Baur and others. I also wanted to make provisions to add steering dampers for both axis so it can be used as a non-centering version for helicopters. I currently have the Saitek stick on the gimbal, waiting on some D-SUB connectors to make the connection a bit cleaner. Eventually I will replace the saitek stick with a Suncom F-15E Talon stick upgraded with Debolestis PCB. Regarding function, I must say I am surprised at how well it works. The TLE5010 sensors give really nice and stable readings without filtering. As i side note i needed to remove the pre-soldered resistors on the PCB that were connected to VCC and MISO lines, and added a 10kohm resistor on a wire near the Arduino. The springs on the cam arms that center the mechanism are currently too weak so they need to be upgraded. There are many things I would improve on a second production version but so far I am surprised at the positive outcome!

-
Fantastic! That is one part of the pit I could see myself building for sure. How do the grips look in an exploded view?
-
I did like Goblin suggested and now my sensors work! Yay! I noticed though that if I use an USB extension cable one of my sensors stops working. I guess I need to get a power adapter for the Leonardo so it gets enough juice.
-
Thanks Sokol! I think I have it wired correctly but when I have both connected at the same time it stops working. From reading other posts I understood there are some extra resistors on the sensor PCB that need to be removed (on the miso pin), but I am hesitant to try anything without good info. I'll post some pics of the gimbal when I get home. Edit: sniped by the goblin :) yeah I read that but I am unsure which resistor that is on the PCB. Edit2: what is the best method for removing the resistor? Just use the soldering iron to hear the soldering and pluck it away?
-
Hey guys, I am building a new joystick gimbal and elected to use the TLE5010 sensors you can find pre-assembled to PCB on Aliexpress. I attached a picture of it. Now I understand that there are too many resistors on this PCB board if you want to use more than one sensor, and naturally I need to use two for X and Y. Sure enough, with only one sensor connected the results are great, zero noise and great resolution. When I plug in two sensors I dont get any returns. I see that Sokol and Goblin both know how to overcome this, but I am unfortunately too newbie at this to fully understand which resistor I need to remove from the PCB or which wires to bridge.. anyone know how to help? All the outputs of the sensors are shared between boards except CS that gets a separate output cable. I connect the sensor to an Arduino Leonardo, and as I said I got one sensor working great. Looking forward to answers, and thank you to all who contribute here.
-
Tips on recycling old HOTAS joystick?
FIN_Centurion1 replied to Istari6's topic in PC Hardware and Related Software
Thanks istari but I'm in Finland so the shipping will be either real slow or expensive, so I'll pass. Nice of you to donate your stick btw! -
Thanks for the input AdrianK and Stang, and lol @ the drawing stang. Since my setup is pretty barebones I can move stuff around if I need to. The office chair I plan to use for the seat is comfy as hell (and heavy) so I hope that it will be comfortable. I also fly with the CV1 and that alone puts some kind of maximum on duration. Never mind that concentration drops quite bad after some time. Gonna start assembling my setup this weekend, will be nice to try it for real.
-
So I had already decided I would hold off upgrading, but I'm having trouble with my 1070 (already RMA'd once) and I think I am out of warranty now. Now I see 2nd hand 1080ti's for roughly 600-650e. It's still a bunch of money, especially since I am probably going to upgrade to 16gb ddr4 3200mhz at the same time. I was just wondering if anyone else has gone from the 1070 to 1080ti and what your performance improvement was like. I have a i5 6600k. The 20 series are crazy expensive here and not worth it for me. Thanks!