amalahama
-
Posts
1814 -
Joined
-
Last visited
-
Days Won
2
1 Follower

-
There are a lot of missing avionics features, included in the F-16 and later addons, that I'd expect to be implemented in the Hornet too
-
Bumping this, now that it seems that Horner is receiving some well deserved love Regards
-
 I expected it in the next patch but according to newspaper it doesn't seem to be the case anymore... I really love ED putting some care and attention to the hornet, because it's lagging behind the F16 and the Apache in realism
I expected it in the next patch but according to newspaper it doesn't seem to be the case anymore... I really love ED putting some care and attention to the hornet, because it's lagging behind the F16 and the Apache in realism -
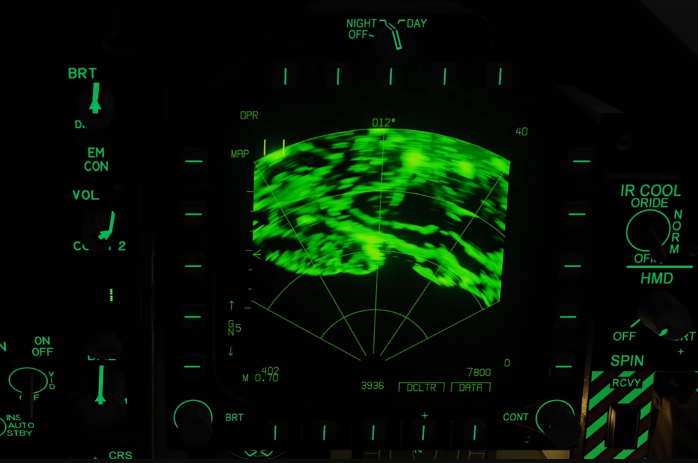
Not functional radar elevation in MAP mode
amalahama replied to amalahama's topic in Bugs and Problems
You haven't got the point. It's not a sidelobe. The main beam has a certain limited aperture that only allows to 'paint' a certain band in the radar scope. This is because AG Mode is a 1bar , and that's why managing radar elevation in AG modes (it also applies to GMT mode) is so important. -
investigating Not functional radar elevation in MAP mode
amalahama posted a topic in Bugs and Problems
This is a basic feature in any RBM mode that still is missing in all ED's modelled radars (of course Heatblur and Razbam have done this right). Currently radar elevation does nothing in MAP mode in the Hornet, basically all terrain extending from below the aircraft up to the radar limits is visible all the time This is very unrealistic. AG modes in mechanically steered radar antennas use 1 bar search patterns with limited aperture that eventually only allows operator to see a small "band". See for example the fantastic F-15E radar, but you can see similar behaviours in the M2000, F-14 and F-4. ED, I think it's time to solve this basic missing feature in the AG radar. BR null
-
I think your are expecting the F-16 behaviour in the F-18, but they handle offset points differently. Not sure if what you describe (that's possible in the F-16) is actually applicable to the hornet
-
What the AG radar need is a realistic implementation of a 1 bar scan including antenna limits, not a colour scale stick on the screen
-
Question about AG radar scan limit in elevation
amalahama replied to Akiazusa's topic in DCS: F/A-18C
Any word on that? The lacking in modelling AG radar beam limits is ridiculous, ED really lags behind other thirds parties in AG radar modelling -
Hi, it's quite annoying that both DCS flagships, A-10C and F-18, still has very simple INS implementations, which make GPS-denied scenarios useless. Both lack INS update methods and in the A-10C, not even drift is modelled, and in the case of the Hornet, GPS-denied navigation is very buggy. As BS3 and F-16 were upgraded with very detailed INS systems models, and pretty much any other 3rd parties have excellent INS modeling (special mention to F-14 and M2000C) question is: is ED planning to upgrade A-10C and F-18 INS sooner than later?
- 1 reply
-
- 6
-

-
So the Viper got a highly detailed, fully modelled INS coupled with a realistic simulation of GPS, when can we expect the same with hornet?
-
The Viper is the one that ED seems to care about lately, Hornet has been neglected for so long. Currently Viper is quite better simulated than Hornet, so better stick with it Regards
-
Hi, In the Hornet roadmap, it's indicated that the INS and GPS simulation has been completed. But the INS modeling in the hornet is very lacking, INS fix methods are not present (even if in GPS-denied missions the INS would drift) and the DMS also lacks functionalities like the option to pan around the map. Can we expect some additional features in the INS modeling in the future? In the F-16 for example, various INS fix methods have been implemented. Regards
-
I have the feeling that the viper is in a more finished state and with less bugs, but also the hornet has a number of advanced features that the viper doesn't have. But overall I think the hornet is a better choice to invest your time in, but be ready to some frustration with bugs and incomplete features
-
The de-synchronization in moving targets make sense as the Hornet doesn't have a Handoff function like the Viper. In fact, for static targets some misalignments should also be perceived, needing a final fine manual adjustment on the target, specially at long distances where the hot spot is small. Alignment is perfect by default in Hornet so this manual fine adjustement is not necessary. Mavericks boresight can also be adjusted in flight like in the Viper to improve alignment between TGP and the Mav, but for whatever reason ED has decided to not implement this functionality.
-
I absolutely believed that PF zones could be transmitted through the DL, but Wags video didn't show it. So, can we expect to have the option to send through the net lines and zones, or that's not applicable on the Apache version we're getting?