sinelnic
-
Posts
292 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Everything posted by sinelnic
-
I do not, but I can point you to a very interesting book, "Principles of helicopter aerodynamics" from Cambridge University Press. It has a very math-heavy chapter on coaxial rotors, but sadly some pages are missing in the google library. Maybe you can get it from some local library (it's US$ 100 in Amazon, too much)...
-
^^^ :drunk: ^^^ Thank you Yo-Yo! While thinking of this I think I understood the why of your nickname, thinking of this stuff can make one a rotor head, let's hope we all can avoid blade collision :). I'm now having problem with the lower rotor difference in hovering thrust. When you say "The ratio is only 1.2:1. To obtain equal torque the lower rotor blades pitch is less by 1.25 deg.", you mean that if both rotors had the same blade pitch, the lower rotor would produce 1/1.2 (that's 1 divided by 1.2) thrust compared to the upper one (because of downwash)? If so, to produce 1:1 thrust, shouldn't the lower rotor increase blade pitch to generate more thrust? Where am I wrong, oh Master?
-
Ok, for the reason for the transition from right yaw to left yaw, my theory is that I'm actually experiencing right yaw while climbing at very slow speed (but above ETL), so that the flight path is tilted up so that it corrects the rotor discs vs CG alignment while having strong right yaw induced from the above mentioned effect in a high collective scenario (even more right yaw). Once we reduce climbing and accelerate enough the alignment looks more like my second post. Oh I need to fly, dang!
-
Mr Einstein, thanks indeed for your kind words even though I'm blatantly attacking your theory!! It's a pleasure to discuss in this way and I'm sure we'll all benefit from this by becoming smarter, prettier and better human beings. I'd like to become taller too, but I'm not sure this is the correct way :P Now please consider that I'm only basically educated in this matters and I'm just amateurly conjecturing stuff here. The main drive for my drawings came from Yo-Yo's words, they were implying we were using the wrong reference system for the analysis and, during lunch, I got the image of a "spherical" system instead of a planar one. Since paradigm change always led me to understand some previously inaccessible problem, I thought I'd give it a try. But I'm in no position to challenge anything, just to guess creatively. That being said, let me try and explain the main issue I have understanding your drag theory. It is the following: you state "In a hover, the two rotor disks of the Ka50 contra-rotating coaxial rotor helicopter are designed so that they produce the same amount of torque (due to drag) in opposite directions. The lower rotor actually produces less lift/drag than the upper rotor for the same relative airspeed, but since it is working in the higher airspeed downwash of the upper rotor, they match torque production at a hover setting." -> I might be completely wrong, but I'd think that if the lower rotor has to produce the same amount of torque than the upper rotor while working in a downwash, it should actually produce MORE torque in "normalwash". If the air is going down, the rotor blades face less air resistance when cutting through it at the same AoA, because that AoA is intended to push the air down and get the corresponding opposite drag and hence the lift; in fact if the downwash were strong enough it would be "accelerating" the blades, not resisting them. So the lower rotor in a downwash should work harder to get air resistance, either by rotating faster (not the case I think) or by having a higher AoA. Am I drinking too much Vodka? If I'm on a plane and I get into a downwards air current, I have to pitch up and/or add power to keep altitude, right? So if the above is right (and please correct me if I'm wrong, but please teach me in the process), then when departing a hover you'd get right yaw instead of a left one. Whenever I take off and move to effective translational lift, this is exactly what happens to me. Please try a rolling takeoff from a runway (for visual reference) with no wind and verify my experience. I'm off my country this week but will gladly post a track on saturday showing this. Once we get into the high airspeed zone, my elucubrations continue, the F1-F2 forces difference in my second post (at the mast, I stand corrected :)) grow bigger than the pure drag-induced opposite right yaw. Don't get why though. Will keep on thinking. Vodka is not helping :). Regarding your experiment, I couldn't try your track because I'm not at home, but can I assume you gained a lot of altitude while pitching up? (there's no way you would avoid this without touching collective, which would introduce more variables to the experiment) But if you gained altitude, you were in fact flying diagonally up and thus keeping the same deviation of the rotor discs centers to the CG relative to the helicopter motion path, thus nullifying the intended effect. Or am I drinking too much Vodka again? It's actually very difficult to try this, in every scenario that I can think of, whenever you try to make an immediate rotor center and CG realilgnment against the motion path, you end up modifying the motion path itself!! (like for example when departing a hover, you pitch down... and the heli flies down!!) Let's keep this up! we'll eventually get it, leave this forum and create our own flight simulation company, and charge 15 bucks for exclusive access to WIP content. Oops sorry, that was completely off-topic.
-
Yeah you'd be better off going to bed because it's 2 AM in Moscow now (and later in any of Russia's 11 timezones). I'll stay here though, in case Yo-Yo is feeling insomniac for some reason :blink:
-
Probably you already checked this, but are you below 20 km/h or less (ideally 0) when you start the autohover? If not, the AP will try to not only hover, but also to position the helicopter in the exact 3D point where you engaged AP.
-
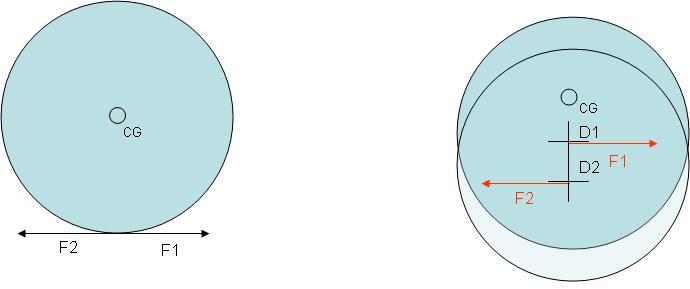
Eureka! I think I got the Yaw. Please see the picture, the key is that rotors centers are disaligned with the CG if you take the HELICOPTER movement plane as the reference, hence the top rotor (F2) generates more moment on the HELICOPTER than the lower one: Did I get it Yo-Yo? Did I? DID I?!?!?!? [Edit] Corrected forces to appear at the rotor centers, not at the tips, thanks EinsteinEP!!

-
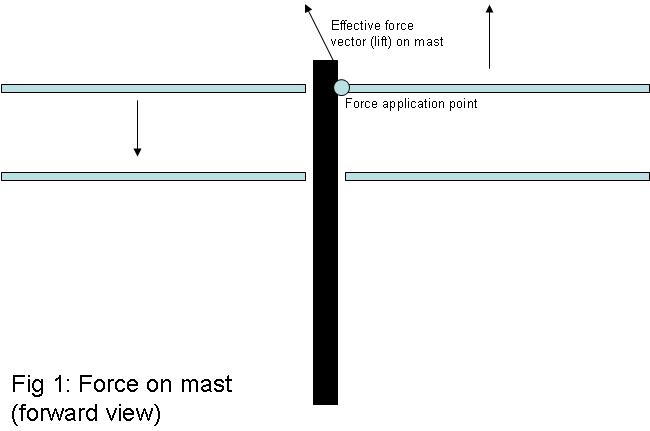
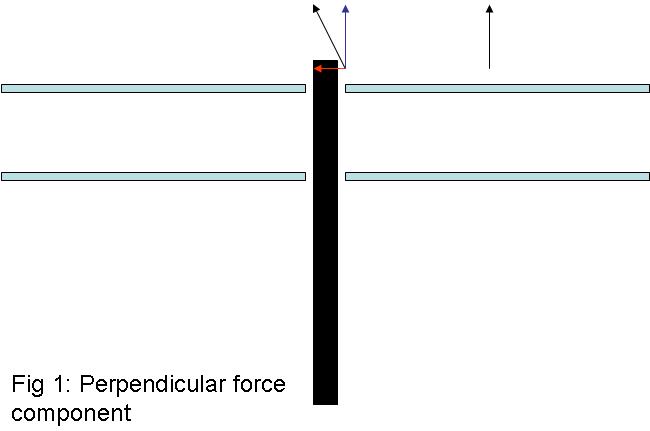
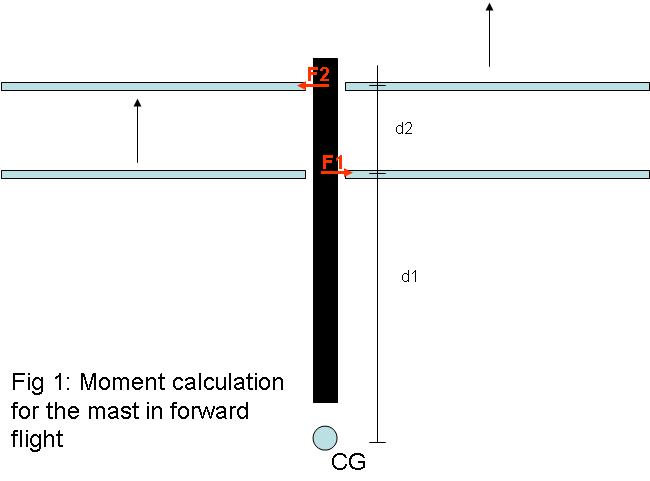
With all humbleness and not attempting to provide a solution but to help understanding to myself, may I be allowed to participate? I tried to create a graphical explanation for the roll induced by the different height of the two rotor discs in forward flight. I can of course be completely wrong, but I hope not by too much. Fig 1 shows a crude simplification of the force that the "moving forward" blade generates on the mast. It's really more of a rotating force but having dampers in the joint between the blade and the mast, and considering the whole blade is generating lift, I believe it's safe to oversimplify this way. I may be wrong. Fig 2 shows the decomposition of the force vector, one part goes to increase the lift, and the other "presses" against the mast Fig 3 shows how, under my ad-hoc analysis, the moment calculation then shows why you get a roll just for having both rotors at different distances from the CG. Did this help at all? I'm still researching Yaw.
-
The issue with DickDastardly's suggestiom is that the terrain mesh in DCS has at its best one vertex every 19 meters (probably much more) whereas for it to work credibly for trees you'd need at least 3 vertexes per meter. That creates a very heavy mesh for LOS computations, even if it's not displayed, considering that every AI unit and sensor would have to include it in its calcs in realtime. Probably not doable without true multicore support.
-
The rocket pod is not articulated so the only way you can aim them, is by maneuvering the helicopter. "Locking" does not apply to rockets for aiming.
-
Ok, my first wish for the list: Improve the "mood" of night flying, by adding more realistic lightning to cities and villages. As inspiration, there's an excellent add-on for FSX called TerrainX, which creates actual lights (like those on the runways) that appear over streets, which give the cities the "starry" feel. Also, night textures in the current engine do not have any illumination, I don't expect to have dynamic city illumination, but some pre-rendering or other technique could be used intead of just the complete black we have today on cities, which is not realistic unless we're also modelling deep energy crisis scenarios as well :). The final intention is to get that feeling of flying over a black sea with star islands, that to me is so magical when flying at night. That's it, wish gone.
-
Hahah Yeah! I want Glottis as FAC. No enemy would dare face us, I tell you.
-
ED is teaming up with Tim Schaffer for Campaign design?
-
Had some problems with W7 RC x64, the game would lock-up regularly, until I disabled the desktop gadgets. Now runs beautifully. [EDIT] My problems had nothing to do with gadgets but with a faulty sound card connector. Sorry about that.
-
Well every weapons system that I know consists of a sight and a trigger from the user´s point of view... some sights are more complicated to operate (radars and such) but in the end, you get a firing solution and hit the trigger. The Shark´s systems are quite simple in fact, and perhaps, what makes the Shkval seem so easy (once you learn it) is that it being an optical system, the game is limited in its simulation by the richness of the visual simulation, that is, you don´t get targets partially covered by grass or bushes, nor you get difficult lighting conditions from shadowing or similar. But once we take that as it is, the operation IMO is as real as it gets. The trick lies, however, as GGTharos mentions, in employing the full system in an effective, efficient and consistent way, which is truly incredibly complicated. My 2 cents.
-
Well if I understood you correctly, I think I felt the same for a while, just enjoying the helo by itself, turning it on and off, flying, navigating and such. But having tried the Deployment campaign, with its very nice introductory flights, easy "conflict escalation" curve and simple but effective "storytelling" that sets the mood in, I became more involved in the actual usage of the Shark as a war machine, developed a sense of purpose, and became a better human being. Guess everyone enjoys this differently...
-
I love the patch. I would like to marry the patch, actually, if I could have ED´s blessing. I get the feeling the FM (or at least the control inputs/dampeners behavior) was slightly tweaked, because the Shark flies much more smoothly now. I can still feel my own inprecisions when controlling the heli, but they have a much lesser effect and my flights are much less "bumpier" than before. Is this just my imagination?
-
If the sim were located in my country, you'd need a strike schedule... also you'd be left at the roof of the train with just a rotor piece in one hand and your underpants in the other, wondering how to return home...
-
Actually the real mechanical system. Thanks anyway Poko!
-
Would it be too much to ask, some diagram and/or explanation on how the actual trimmer system works in the Shark? Thanks!
-
Thanks for the effort DCS team!!
-

Problems completing 'Clear Tkvarcheli'
sinelnic replied to GAJ52's topic in User Created Missions General
Uhm... re-read post 7... first line... -
Hello Sweinhart, could you please confirm that you need a 120Hz LCD to use Nvidia 3D Vision? Or can you use it with a regular 60 Hz LCD? Thanks!
-
Hello Yo-Yo. Would you know what Joystick model were they using for this testing?
-
Spanish DVD has the extended pdf flight manual
sinelnic replied to Distiler's topic in DCS: Ka-50 Black Shark
If the studio head is unable to make a decision, just follow the studio's heart. But in any case don't let the issue go to the studio's intestines... Oh wait! what I'm I talking about here? I already got my manual :P