Gunnars Driver
-
Posts
799 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Gunnars Driver
-
Ahh, copy! I just got my shipping within five bussiness days, så it is on the väg.
-
If I remember right, you’re from Sweden? (Hejsan!) Or I may be wrong? Already did get the Varjo? I ordered the same day they opened orders from sweden( I did get my “will ship in two weeks” today, so not that long wait now).
-
I just cant wait for them, or actually I can for a couple of weeks as I will leave for work. But after that, I cant wait any more. I did my order the same day they opened for orders to Sweden( first part of November) so it might not be a very long wait then…
-

Varjo aero ....anyone got one yet?
Gunnars Driver replied to markturner1960's topic in Virtual Reality
I have a 3.5x3m office, more or less a man cave so I dod mount the lighthouses on the walls. Not that it matters for tracking purposes. I ordered the Aero the same day it got possible in my country(Varjo didnt open for all countrys initially). -
Varjo aero ....anyone got one yet?
Gunnars Driver replied to markturner1960's topic in Virtual Reality
I have double lighthouse 2 set up for Pimax 8KX. It has newe even glitch when use( exept for one buggy software update). I have the lighthouses set up diagonally in the room, at about 2m height. there is no space in the room nit covered by the lighthouses. The lighthouse seems much better than Oculus Rift trackers, which was really good, but could be covered by the computer screen etc. My Reverb G1 causes issues at least 10 times each gaming sessions. This despite full lighting in the room, setup to help the WMR tracking. I am not the slightest worried about that the Varjo + lighthouse tracking should not perform very good. -
Varjo aero ....anyone got one yet?
Gunnars Driver replied to markturner1960's topic in Virtual Reality
They have started shipping in small numbers to ”very important customers”. Article with Urho Kontorri varjo founder and chief technology officer So they probably is on track or at least not very long behind. I did order a few weeks ago and hope for delivery in February or so. -
I got close to buy the DCS Gazelle because of a friend (not a pilot) hauling it a few years back but after a little search here I found out about the flight model. Yes, a setting that takes the type/variant of cyclic used and adjust for it would be really good. I did fly the AS332M1. Its virtually a L1, but also virtually a AS532 Cougar. The technical course was on the L1, and all simulator training on the AS532. I actually think(quite sure) all of them have the ”mixing unit”, probably still there on the H225. I’ll If you did fly any AS332 you might have noticed the automatic nose down in the final part of a landing to hover when the helo by itself lowers the nose in the same time collective is raised. As the coupling is nose down when increasing collective it does it during the landing fase as well. [Edit]Just checked the RFM/Training manual of the H225. Yup, hte mixing and phasing unit/ still there.
-
Well, even if I havent tried it its clelar that the dcs gazelle is not close to reality. DCS have different flight models and I think they would be better of saying its not close to the real thing but ”adopted for gaming with a classic joystick”. If they say the flight model is verified by real Gazelle pilots, something is clearly wrong, that why I think it looks like someone not really knowing som (like a RC helikopter enthusiast or so) did get some input on this module. On the other hand, I have seen flight characteristics in DCS being quite exaggerated to the extent that it has gotten completely unreaslistic. It is hard doing a dcs module that is both very realistic and at the same time ”flyable” with a short standard PC joystick. I have been a little involved in the BO105 flight model earlier, and they wanted it to be as ”close as possible” to the real thing. The real BO need very small cyclic movements comnpared to some other real helos for normal flying. Thats small movements on a about 55cm long cyclic. On a joystick the movements would be extremely small if made as close as possible. At the same time the secondary effects* from collective is extreme on the BO. Seen togehter it would be very hard to fly a BO on a small PC joystick in dcs without getting serious PIO. The essence from the behaviour described below is that anyone trying to fly the BO105 flight model, if made exactly ”as is” will get a sharp nose up and sharp right roll when increasing the collective. The correction is needed but the amount on a real flight stick might be only a few millimeters forward and left on a real cyclic so maybe 1mm forward and left on a joystick. So whats needed is some common sense to make a flight model flyable with a joystick, and maybe some characteristics should be left out or maken weaker not to make it to hard to fly. I think, anyone with experience should recognize the feeling but should not have a hard time flying it due to the difference between a real cyclic and a joystick. This doesnt excuse the flight behaviour of the dcs gaselle, thats not the point I have. The DCS Huey is a good example(although there is some things that is not really like the real one and could be fixed). The Huey feels nice and fun and give a good feeling despite it it not very close to the real Huey in multiple aspects. *Increasing collective makes a strong nose up and strong roll to the right(how much is speed dependent), so flying straight and level at 60 to 80knots with the cyclic trimmed and increasing power significant will causer a pitch up moment that eventually would have the nose 90 degree upp if the speed didnt bleed of, and the roll rate would put it inverted. This combined, with the right amount of collective could set you up with about 45 degree nose up and 90 degree right roll and speed decreasing below 40-45knots, at the ”top” decreasing the collective cause a left roll and nose down so you have now completed a stall turn and are flying from the same way you came from(180 degree change direction. This with the pedals held in the same position with now compensation for the increases torque and also the cyclic held completely still.
-
Ahh, I thought you meant in a real helo before. Yes, in hover the cyclic needs to be kept displaced as the dissymetry of lift will act to side wind or hovering sideways as forward flight. As I understand it, the DCS gazelle doesnt even need a displaced (forward) cyclic for forward flight ? Seems they have made the gazelle module to act like a radio controlled helicopter which use a flybar for stabilisation. Wonder if they had a RC-pilot to "help" with the flight characteristics ?
-
When we say ”centered” we do not mean the exact 50% value. Centered is the position that at the moment do not cause any rolling moment when we refer to the sidewards position. It changes depending on very many factors, as can be seen in the link to R.W Proutys information. The final position for a steady turn depends on a lot of factors and in some helicopters you still have a slight offset to the left or the right depending on for example the coning angle of the rotor disc, the postition of the tail rotor(mainly how high it is mounted also have and impact on this as a low tail rotor cause a rolling moment on the helo). Increasing the collective will cause a rolling moment that will need to be corrected for, to keep the desired bank. Centered stick = the (varying) postition that impose no rolling moment = no roll rate on the helo. Also, keeping the bank in a helicopter without a stab system is not keeping the stick in one exact position as helicopters are statically unstable and dynamically stable. You need to correct the position any time as any disturbance, how small it even is, causes the actuall cyclic position to be ”not centered”. Normally you will newer be out of cyclic response. You will newer ”flip over”. That will not happen, ever, as you describe it. All singe rotor helos is affected by rotor turning direction and have one rolling direction(Left or Right) where the response is lower. For the BO105, at speeds between 20-50-60kt the left turn response is lower than at other speeds, perhaps lowest at about 40kt or so. Left stick will always cause a left rolling moment but at the 20-60kt the roilling respons is slower than the BO105 normally have, and putting yourself into a steep right turn at low speed an dlow altitude can be dangerous as the time needed to roll back to upright will be much longer than it normally is. But remember, left stick always will cause left roll. No flip upside down. The BO105 getting out of margins for left cyclic is unique, perhaps the Lynx behave the same as it also has a rigid rotor system. For the BO105, the secondary effects of the collective and cyclic is VERY strong and if you are in a right turn and reach the left stop you just need to lower the collective. The secondary effect from lowering the collective is a (among other effects) clear left rolling moment, so if you lower the collective you will incriease the left rolling rate. Quite much if you lower the collective much. I would say that if you fly the real sa3412/342m and for example increase collective you will need to move the cyclic forward if you want to keep the attitude the same. If not moving the cyclic forward, the nose will come up. Your description of the ”only use collective” or ”only use cyclic” do not match real helos without sas-systems with attitude mode. This is due to aerodynamic effects that no helicopter can escape. Increasing collective with forward speed will increase the blade angle by the same amount on all blades. When the blade is moving forward(left side on the as341/342 i think), a small change in the blade angle will cause a big change in lift and the backwards blade will get a lower change in lift(this is due to the dissymetry of lift) and the gyroscopic precession makes the increased lift from the forwards moving blade act in front of the helo, and the rear moving blade act over the tail. As the lift increases more in fron then in the bakc there will be a pitch up moment that will raise the nose. The superpuma (I got some 2K h in it) has a advanced mechanichal mixer that actually moves the cyclic forward when the collective is raised, to counteract the secondary effects. It actually has that advanced mixer despite having an AP(SAS system) with attitude hold function. As form the side wind, you are not correct if I understand that you mean side wind in forward flight in a real helicopter. Side wind do not effect the helo behaviour in the air as the helo moves straight though the air(we are speaking ball centered flight). So the helo flies straight though the air and experience the air coming from exactly straight ahead. As we fly in the air mass, we will drift to the left or right if having side wind from the left or right. This means the turning will be 100% as if flying in no wind when it comes to the stick positions.
-
Yes, in all basic simple helicopters(without a stab system), it does. Heres a short explanation by R.W Prouty, a well known helicopter aerodynamics expert whom has written quite a few books on the subject: https://flightsafety.org/hs/hs_may-jun89.pdf Currently fly NH90, since 2013 Before: AS332M1 2008-2015 MBB BO105 1997-2008 B206 1996-2001 Schweizer 300 1996-1999 And some B206 Jet+ Long ranger, B412, B204 Huey. (And planks before that) The Bo105 is extreme on the cyclic positions and the secondary effects. At low speed, more or less all helos have the cyclic displaced to the left or right depending on the rotor turning direction. The Bo105 will have the stick very far to the left if in a steady bank to the right at low speeds. Between, say 20 and 50-60knots this is extreme and if you do a steeper bank to the right at low speeds you might first be very much to the left with the stick with not much margin to the cyclic stop and you might hit the left stop while still having a quite moderate roll rate. We had one Bo105 with an inexperience pilot that tried a step bank at low speed, also turning into the tailwind. Wasnt able to recover and crashed. This stick displacement also is vaslid at higer speeds but not that much but the reason for it, dissymetry of lift, makes rolling to the left very slow compared to rolling to the right.
-
That is not really true. First of all, you need to see the difference of a helicopter using a stabilisation and augmentation system with attitude holding mode and simple helicopters without this. A Uh60 have a stabilisation augmentation system with attutide hold( I think its called Flight Path Stabilization in the UH60). I fly the NH90 with Fly By wire wich also use attitude mode as the main mode. For these helicopters there is a synthetic way to make the stick act like ”release stick t centre = roll back to wings level . To keep a turn, keep the stick displaced. This is not how ”simple” helicopters without a stabilisation augmentation system that use attitude mode work. For a simple helo, or a helo with a simple stabilisation system, the stick will ac like a aeroplane stick. Centered stick = no roll input. (The centre change with speed and power setting so it is not always at the same position). To make a left turn, displace the stick to the left to get the desired roll rate and when the desired bank angle is reached return the stick to the centre position to stop the roling moment. In a turn, the basic helicopter actually can not ”know” it is in a turn or know that it is banking. The resulting G force is straight down through the floor so for the sake of the helo it could be doing a slight stick back nose up movement resulting in the same G-force. Becauser of the facts that the resulting G-force points straight down there is no need for any cyclic stick sidewards movement to keep the bank. In most cases the stick are very close to the same sidwards position as in forward straight and level flight. Helicopter with the ”West rotation”(anti clockwise seen from above) will most often describe a movement with the cyclic that is to more to the left when speeds increase from hover, and then the left reduces with incresing speed. Ramsay is right about the sidewards flight, cyclic will act in sidewards flight as in forward flight. The faster the sidewards flight the more you need to displace the stick to that side. For the SA342, I have never flown it and I do not have the module but as a basic helicopter it should act as the simple helicopter above. If it is equipped with an autopilot or sas system, it could behave like the description avobe similar to the att mode but only when the autopilot is engaged.
-
Yes, something like that. I have the Reverb G1 since one year and recentrly got the 8KX. The 8KX is king if you can drive it, in DCS this takes about what you have. ( I have a i9 9900KS at 5.2Ghz, 32GB RAM, ASUS Strix RTX3090 OC). DCS works fine but there isnt very much of margin to always have a smooth ride. Ohter games, no problem at all. Racing games, Half life alyx work flawless. The 8KX have a quite narrow focal distance for your eye. If you cannot see sharp with your own eyes on about 0,75M or 2foot, you might need glasses to se sharp in the 8KX. I need glasses in the 8KX despite 20/20 visuals(25/20 actually) an no need for glasses IRL except reading glasses. In Reverv Pro, Oculus Rift/Rift S I do not need any glasses so these lenses are quite different than most other VR sets. If you can accept glasses or dont need them = 8kx is king.
-
More VRAM helps a lot with DCS VR performance
Gunnars Driver replied to RealDCSpilot's topic in Virtual Reality
Well, I’m not sure but I almost think when I read it was written by nvidia. The new GDDR6X have doubled data rate per clock cycle compared the the RTX2000 GDDR6. Theres a new way of I/O of data /RTX IO) that offloads the CPU from decompressing work and also is ”and improving I/O performance by a factor of two.” I do not remember all parts but I did read this: -
You need a decent cpu-cooler for moderate overclocking. do you know what cooler tou have? coretemp is a small fine free software go keep the temps in track. https://www.alcpu.com/CoreTemp/ overclocking has never been as easy as now. Youtube etc is full of information. What motherboard do you have ?
-
What you need for VR in DCS is pure clock speed. I actually think a 6700K should be possible to overclock to betwen 4.8 and 5ghz, if you can do this you are quite close to a new CPU single core performance. If not, get a cpu that have high clock speeds in turbo mode( should not be below 5ghz to have a little headroom forward. Still, even with a new CPU you probably need to apply some of the ”OC Settings” to make it run the whole time during gaming at the turbo speed.
-
Yes, at least I think thats a good idea. You can test using the same total resolution( pd/ss) and se if theres a diff in CPU load. Remenber to look at the single CPU core having the highest load. (do not look at total cpu load on all cores together).
-
DCS pixeldensity (PD) loads the CPU more than Supersampling does in SteamVR. Same result so keep PD at 1.0, or possibly lower. One thing: I think there is a lot of people that believe their CPU is the bottleneck despite it might not be. If that is the case( GPU limiting), measures to decrease load on CPU and increase on GPU might be a bad idea.
-
Anyone have good tips & tricks for the pimax setup. Still without base stations so I just made som tests so far, the little gaming I done have been with the reverb. I see SteamVR default resolution is quite high( 100% = quite some supersampling). So, which pitool settings, steamVR and DCS are you using?
-
We are talking pitool v1.0.1.266 ?
-
I think setting both to 2160x2160(or as clos as possible) would be best. am a little bit unsure, because of the SteamVR settings for the G2. Perhaps best to use fpsvr to get a reading of the reported SS, and recalculate from Steam vr 100% resolution setting. What resolution is reported at 100% on the slider with the G2 ? I dont know if installing the beta version of steamVr fix this for the G2, it did that when Reverb G1 was new.
-
I did order the bundle so I'll get two base stn 2.0 in about a week according to fedex. Another question: My friend is thinking about getting the 8KX but because of the base station wait and also possible warranty issues, he did plan to order the 8KX from a swedish retailer that have 8KX in stock. Which base stations work? Is it only steamVR / Valve index base stations that can be used or can HTC vive be used also ? I didnt learn about this as I ordered the bundle.
-
All settings will always be a compromise between quality and fps, in DCS. In other games you might be able to use all settings to the max. I suggest to start with using no supersampling. That will be looking at the resolution and not the percentage. Go as close as possible to 2160x2160. This is to get the fps running and when it does you can tune the SS up step by step. The about 2700 x2700 you run now is actually about 160%. Which is a bit high if you combine it with other GPU-killing settings. The supersampling settings multiply so you need to keep control of the universal settings also. If you set 150% SS in the universal and 150% in per application setting/ DCS you end up with 225% ! I have always used PD 1.0 in DCS togheter with Reverb/SteamVR SS. At least in this case you shouldnt need to set it lower than 1.0 I use shadows : Flat, instead of low. MSAA, actually Supersampling does about the same thing when it coems to jagged lines and combined its a hard hit on the GPU. Start with MSAA OFF and test if you like 150% Supersampling(about 2645x2645) better than MSAA. You probably need to choose, or go low on both. I did choose to use high SS and no MSAA witht he 2080ti I had earlier. Clutter/grass has a impact, suggest lower it a quite much for starters, try 30%. Trees visibility also have a impact but as we do not want to see the threes grow close to the nose, suggest start with 50%, and then increase is, as one of the last things to increase. Smoke/chimney density: do you need to see this, otherwise set it to lowest.
-
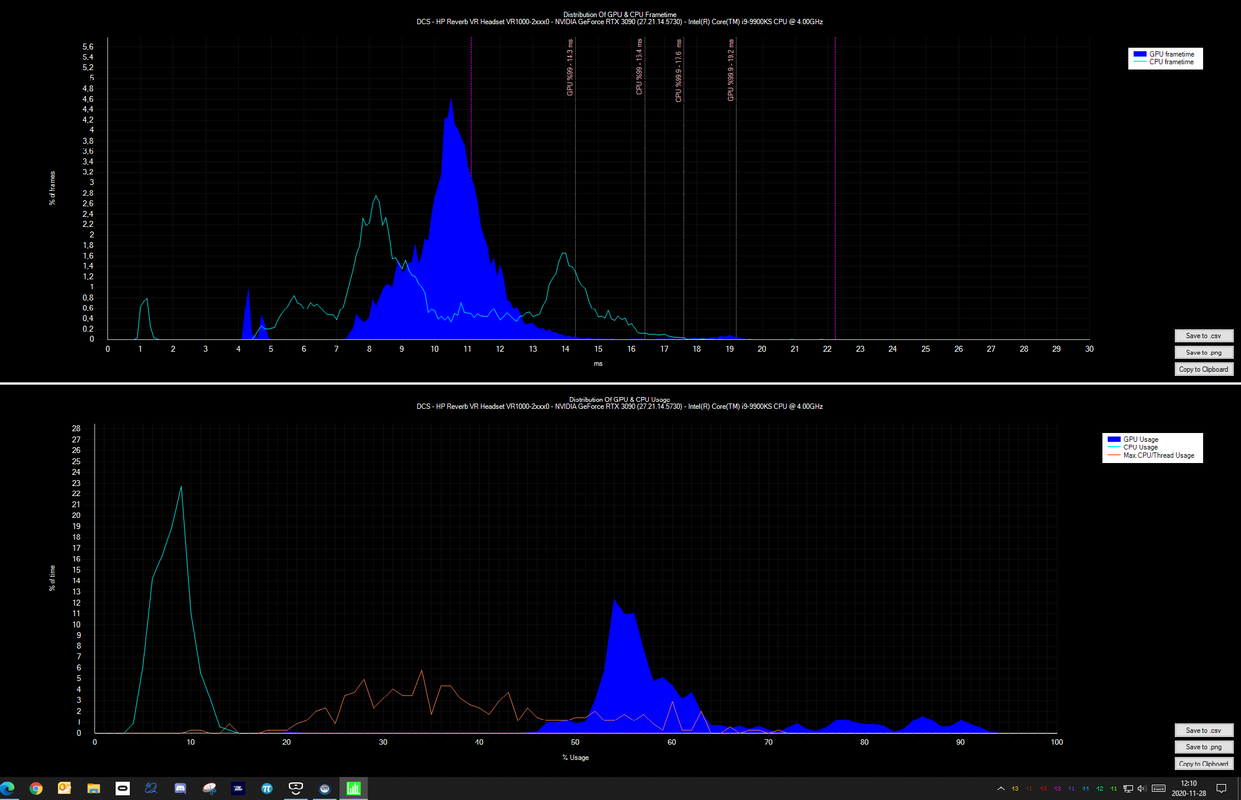
I'm still not CPU bond on that [Mission qualification -Supercarrier cold start]. Down below, datalogging from mission start with manual engine start and taxi - catapult - take of. I did use motion reprojection as I most always do, without the mean fram rate had been higher as Im either close to 90 fps(frame times about 12ms) or I get 90fps. In this test I did not stare at the tower, and did not use F2 and circel around the tower. Just engine start as I would do and taxi -take off. I can produce CPU frame time about 23-24ms by starring at the tower. But for all gaming inside aircraft I never go below 45, and mostly get 90 fps. ( SS 100% with the reverb G1, as I also use Pimax 8KX and there 150% is a bit high. I dont think SteamVR SS loads the CPU noticable so it might not make a big diff.)

-
The base stations and knuckles are now shipped, so in one week I’ll have them. Yes, I have used the 8KX in 3DOF but its not that fun in DCS, can not bend forward /move the head to flip a switch an not se things behind the flight stick. I need to perform a quick roll to find and flip a switch behind. Also, the pimax experience can really be used without controllers. I also play a racing game and there you dont really need the base stations. Can be enjoyed in 3 DOF. Yes, pimax have been ok with communication during this but the ”shipping within 7 workingdays” made me believe I would get the whole order sent. If I knew there was a 2 month wait for the base stations I probably had waited with the order.