Naquaii
-
Posts
1222 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by Naquaii
-
The ALQ-167 was mostly used with TARPS so do not expect it before TARPS if we do it, which is not yet sure. (The ALQ-167 that is). Even so it's unlikely it will be more than a visual pod as we already have a jammer in the F-14. DCS ECM is limited to a single on/off boolean, you're either jamming or not, nothing in between. So having two jammers won't make a difference until such a time as when ED further advances what's possible in DCS in regards to ECM.
-
Unfortunately a lot of the datalink functions, including those are nonfunctional as they're intended for use with a controller on a ship or an awacs like an E-2C.
-
Hi guys! Thanks for all the input! The manual is now updated, highlights are: Updated CAP Matrix section: http://www.heatblur.se/F-14Manual/general.html#id12 Added NAV GRID section: http://www.heatblur.se/F-14Manual/general.html#navigation-command-and-control-grid-nav-grid PDF will be updated further along to include this.
-
Currently not, but it is correct procedure.
-
The multicrew limit in multiplayer is on ED's side and unfortunately completely out of our hands so I have no information regarding it.
-
TWS Auto when implemented will control azimuth, elevation and coverage to cover as many of the detected targets as possible.
-
We hear you guys and appreciate the interest but as has been said there's just a lot that's still classified about the -D Tomcat. We're missing a lot of info on the mfd menus and more critically lack most info on the upgraded AN/APG-71 radar making an accurate simulation of the -D very difficult. The same applies for the upgraded P-TID -B as we miss critical data on the P-TID functionality.
-
As for 1, 2 and 3 we'll take your suggestions into consideration. IFF is already being looked at, while it won't be instantaneous due to how it works we might speed it up in regards to how he handles it. In regards to controlling backseat stuff from the front seat, that will always be via Jester, it was never our intention to allow the front seat to work back seat controls. 4. This will change when TWS Auto is implemented as it will control the scan volume. 5. Jester follow the Natops which says to start the alignment after engine startup as the power transitions can trash the alignment. 6. Also Natops procedure. 7. We're always evaluating Jester behaviour and it can be a thin line between realism and sim, keep in mind that a human player sometimes do stuff that no real pilot would. We'll take it under consideration. 8. Currently it's quite quick to set it via an F10 map marker, but we'll think about it. The GBU-24 is implemented as far as we can, as far as we know it needs to be finished by ED. As for switching seats in MP, that's a limitation of the DCS engine in multiplayer, it's simply not possible unless ED changes this on their side. Thanks for your suggestions!
-
This is currently not possible and not something Heatblur can fix. It's simply not possible to switch seats in a multicrew aircraft in multiplayer in DCS.
-
In general our F-14B is based off of an NAVAIR 01-F14AAP-1.1 Natops from 15 may 95 update in february 97 but the TID software is a bit of a mix as we don't have a full description of that era WCS. So some stuff in the WCS might be a bit dated but will be updated and added on to as we find info on them.
-
As far as we know that function is from a later tape (software version) than what we're currently modelling.
-
You always need your own radar to track the target, there's no way for the WCS to support a phoenix launch against a datalink target without it's own radar painting it and the sparrow need a STT lock like you say. As for the link, nope, they're mutually exclusive as it was in the real aircraft.
-
IRL I'd say you could launch it active in PD-STT and have updates yes. Afaik this isn't currently possible in DCS though as it uses own radar only after it goes active.
-
Thanks! :-)
-

[NO BUG] PDSTT have some problem for lowspeed target
Naquaii replied to FWind's topic in Bugs and Problems
Not sure about your exact specifics but do keep in mind that hooking the target on the TID and then pressing PD-STT or P-STT is a much more unreliable method of locking a target than locking it manually on the DDD. This is intentional as it is described that way in the documentation and by SMEs. Also doing this while maneuvering makes it very hard as TWS is not as reliable when not flying straight and level. Flying stable straight ahead it should work though, while in a turn it's very difficult. -
This is the RWR trying to make sense of the signals and correlate all the signals to the same symbol/threat. When you turn it is possible to momentarily confuse the system and additionally the F-14 has the two rearward quadrants mounted on the stabilators. As those can move quickly when you maneuvre that also adds to the issue. All this is modelled and is the reason for the issue you are describing but it is working as intended. This correlation system also means that sometimes the RWR can't tell how many of the given threat is present if they're closely packed.
-
He should return automatically once the transitional mode is turned off.
-
As a pilot that’s usually how I do it yes. The RIO can just go half-action on the hcu and release, if full-action is never pressed it returns to basic search.
-
Nope, VSL and PAL will continue until it finds a target or it's cancelled, so if you just let it be it'll run continuously. When cancelled all transitional modes and STT locks will revert to basic Pulse Search or Pulse-Doppler Search. RWS or TWS has to be reselected manually.
-
It is accurate, it uses fm-ranging to calculate the range similar to how RWS and TWS does it. But it is hard to accurately read it on the DDD so for exact numbers I'd advise you to use the TID and just use the DDD for rough numbers.
-
When not in pd-stt or tws the phoenix will always be launched active, the PH ACT switch exists only to force the WCS to launch it active in pd stt or tws. The WCS will never try to launch in SARH in a mode which isn't capable of supporting it.
-
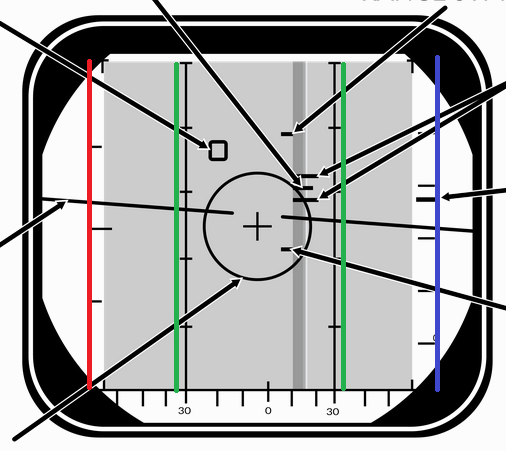
Hi again! Sorry for the late reply, I've been away during the weekend. I've attached an image with the different scales marked. The scale marked red to the left has a synthetic range marker overlaid while in PD-STT. The scale marked blue to the right has a closure rate marker overlaid in either STT mode. In other modes this information is displayed at the correct azimuth on the screen instead if it is available. I.e. closure rate in PD and range in P. The two lines marked green exist to deliniate the 30 degree azimuth mark to the left and right of straight ahead. None of the markers along these scales have any set values except that the bottom of the screen always is range 0 in pulse. Any numbers present are remains of earlier versions of the DDD which couldn't have the scale of the closure rate changed by the operator. So in all cases the RIO has to know what closure rate interval (PD) or range (P) is set and that becomes the upper and lower limit of the DDD. So if in pulse with the range set to 20 nm the marks along the left side represent 0, 5, 10, 15 and 20 nm, with 0 and 20 being the bottom and top of the screen. If set to 100nm range those same marks are 0, 25, 50, 75 and 100. If in PD the Vc switch sets the interval. As an example, in the NORM position the scale is from 200 opening to 1000 knots closing. That means that those same marks on the left now represent 200 knots opening, 100 knots closing, 400 knots closing, 700 knots closing and 1000 knots closing with 200 knots opening and 1000 knots closing being the bottom and top of the screen respectively. As you can see the marks along those vertical lines mean different things depending on mode and settings which the RIO has to keep tabs of manually. You can view those markings as helping the RIO make out which part of the screen the target is in which can the be used to manually calculate the value. The marks on the left marking quarters of the screen, the two middle one fifths and the right one sixths. Hope this helps!

-
The only difference between having the ACM cover up or not if you're already in A-A mode is that the LTE (launch-to-eject) is short in certain situations. With a pulse lock the phoenix will always be launched along the sensor line of sight regardless if you're in ACM. If you don't have a track it will launch along the ADL.
-
It's just a scale to help the RIO visually make out were on the screen the target is. None of them are dedicated to a single task, just think of them as marking a percentage of the whole screen height.
-
Not saying yes or no on that as it's not my decision, just that it's not currently possible. But I'd imagine we might eventually get to it, no promises!