AeriaGloria
-
Posts
5870 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by AeriaGloria
-
You can also remove the AOA limiter by pressing the “stick deflection limiter override” bind
-
It looks pretty smooth to me unless that is not you moving the stick I can say you are at very low speed (330 kmh), and your AOA meter is at the top. When the plane reaches its AOA limit at this speed (26 degrees) it will move the stabilizer down 2 degrees and push the stick forward. Once it’s below the 26 degrees it will go back to normal.
-
No I am not.
-
Depending on the magnitude of the maneuver, it is pretty much correct to “bounce once or twice” after a significant pull. Manuals on longitudinal stability mention that even with damper on, depending on altitude and the amount/speed stick is moved, stability is “near dead beat,” but not exactly dead beat. Dead beat stability would mean it either returns to level flight smoothly or bounced back and forth atleast once. A lot of it is a consequence of its reduced stability (only 2-4% stability margin), the damper isn’t perfect, and below 8 km the ARU reduces authority unless above 1200 kmh IAS, and above 8 km air is very thin.
-
What would you say was your experience hit rate?
-
You should be able to, right click top left corner of armament box when loading bombs. Then you can enable delay fuses and the such. I need to make a video on it. The main obstacle is you can be too low becuase there is minimum time the bomb must be in the air before it fuses. But then you can set explosion to 20-60 seconds after impact or longer I think
-
It is believed that Ka-52 has no RWR either Unfortunately Migow I don’t think the UV26 panel was ever implemented if you mean the one in Mi-8/Ka-50. Even Mi-35 used the same countermeasures panel as ours I believe.
-
I assume you reduced NVG gain all the way?
-
Well for one, how sure are you of a difference between take off and landing flaps? Wags told us before release that the difference is “LEF scheduling,” but no one has told us what this scheduling difference is and everyone so far has found identical behavior of flaps and LEF between takeoff and landing flaps in game. Not to mention, both the flaps and LEF only have two positions. Up and down, there are no medium positions. So if the difference is really LEF scheduling perhaps the only difference should be the LEF flap lights, even though no one has discovered this scheduling difference yet. Edit: Your right it does say so in EA manual. I wonder if this is an assumption like the Rene wheel that needs to be corrected
-
Is there a time to look? All I can see about video for HUD is it went down to 30 kmh
-
What sort of maneuvers? The real MiG-29 does have problems with oscillations between around 4 km and 8 km altitude
-
Reading a KOLS manual for a future video I’m planning, it says “ Ensures reduction photodiode temperature to 70-80°C. .” I don’t know if it means -70-80° total or just below ambient
-
Yes, videos and tacview will do little to help ED correct this. The more track files the better. I recommend doing your tracks with you 5 degrees below target or more so target cannot really notch you, therefore only guidance deficiencies of the R-27R/ER will be seen.
-
We also must not confuse the Beryuza datalink with the Beryoza (Birch) SPO as well. What we need is more MiG-29 pilots to definitively describe their experience using the SPO with the radar. If one does not make a difference for ED, perhaps we need multiple.
-

SPO-10 possibly missing function from changelog
AeriaGloria replied to AeriaGloria's topic in Bugs and Problems
Is it possible to get this investigated? It is probably the most wanted feature of SPO-10, and it seems per the changelog work has already gone into implementing it it just somehow did not make it into the game. If other redfor modules are made someday with SPO-10, it’s especially important. -
Thank you! I am confused here, is the 780 in this chart not for radius of turn in meters with military power at 600 kmh, 4.2 G sustained with 11.3 deg AOA? With the speed figures only in 500/600/709/800/900 kmh? We have an investigating tag everyone, so I think we got ED to take a look at it.
-
It makes me wonder how OLS-27 works, as Su-27 gets much more range from its IRST with reportedly 15 km head on and 50 km rear detection for F-15 type target (Su-15). I wonder if perhaps it uses nitrogen or still peltier cooling, and I’m sure it uses InSb instead of PbSe
-
reported earlier AEKRAN supposed to look like this?
AeriaGloria replied to Lixma 06's topic in DCS: MiG-29A Fulcrum
How interesting, thank you. I assume the electric current is partly why palladium was needed -
Ah thank you
-
If it is a preliminary 1982 manual that is the one with the phrase “ When the radar is switched on for emission, it is not possible to use the information from the SPO-15LM indicator due to its erroneous nature and, in some cases, chaos/При включении РЛПК на излучение использовать информацию с индикатора СПО-15ЛМ не представляется возможным ввиду ее ошибочности, а в ряде случаев и хаотичности.“ That is incredibly interesting piece of information……..
-
I wonder what they meant then “The thermal homing head has two photodetectors: one is deeply cooled to a temperature of -360°C, and the other is uncooled.”
-
I am just repeating what is said in MiG-29 manuals. Perhaps it meant 360 degrees below ambient.
-
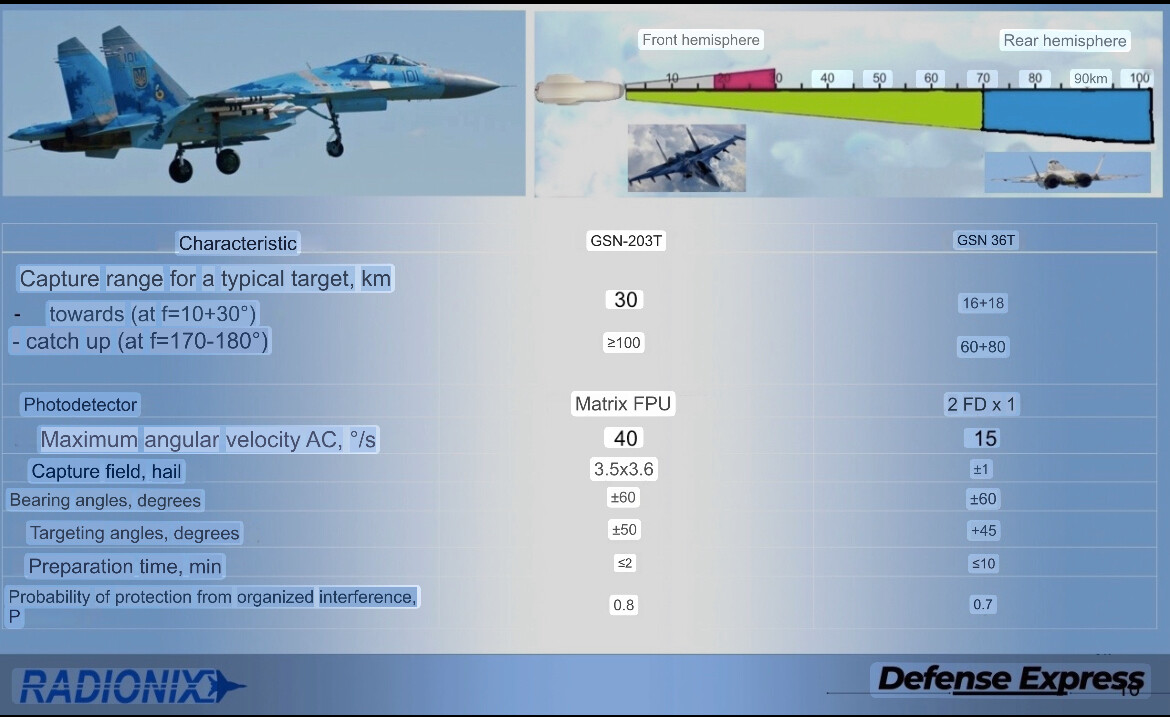
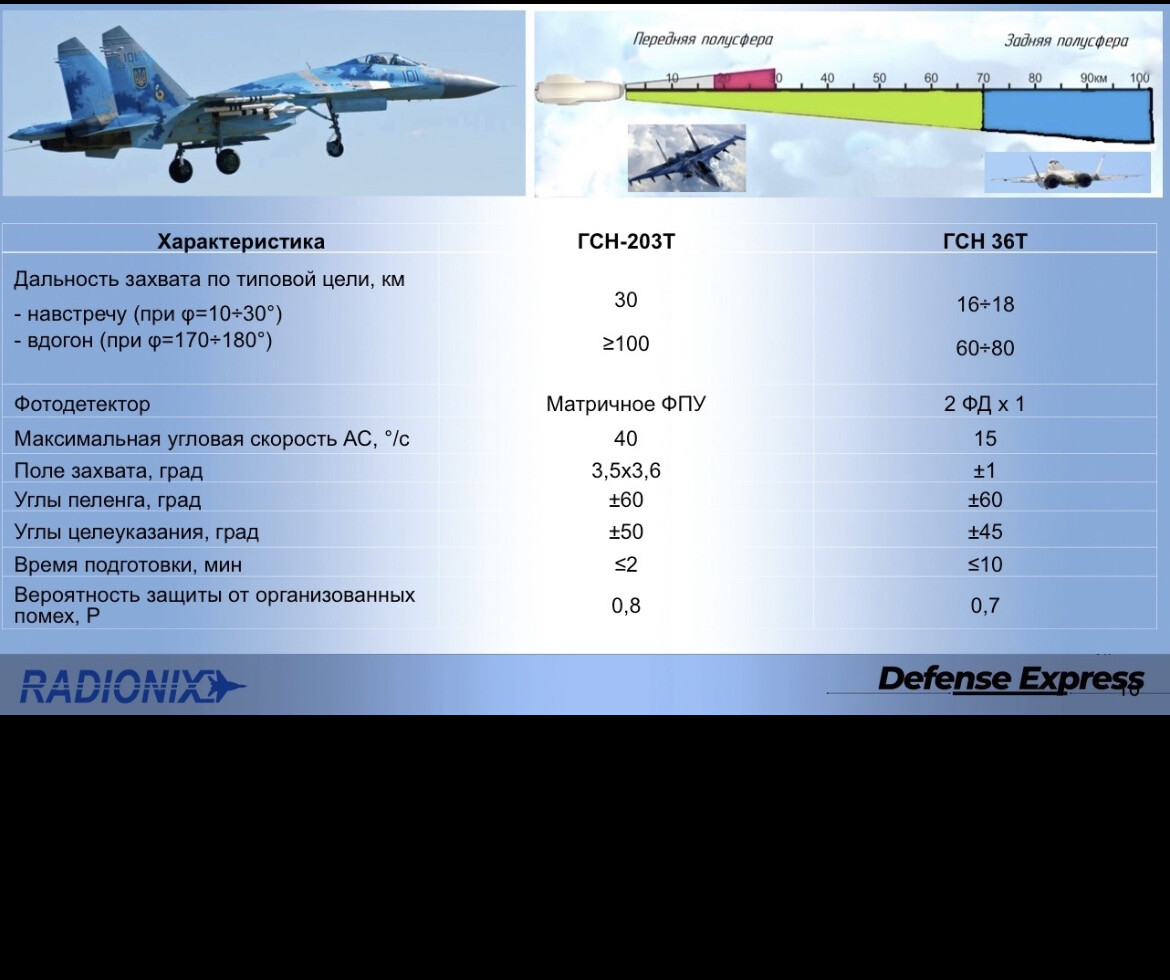
Well to be more specific, the KOLS head is cooled, Peltier cooled. However PbSe has a limit to how much it can be cooled, and if it’s like the R-60M seeker which is also a Peltier cooled PbSe seeker, it is likely cooled only to 40° C below ambient. However the R-27T/ET 36T seeker is cooled by nitrogen to -360° Celsius, so both are cooled. But 36T cooled to a much higher degree from the nitrogen and InSb working so well at such low temperatures.
-
I’ll try and do your test at 100m.
-
The KOLS head itself is about the size of the R-27T/ET seeker head, but behind that opaque cover I would bet the actual mirror of the R-27T/ET is smaller and collects less light. However, like R-73, I would bet the cross seeker of the R-27T/ET is InSb sensor material. While KOLS 14 element seeker is using worse PbSe (same sensor material as R-60M, but of course much larger material and more sensor elements using a cross type seeker arrangement). Brochures for R-27T/ET give a 15 km head on range and 70 km rear aspect range against an “average target,” which I would assume to be tested against Su-15 (as for Su-27 material when they reference F-15 type IR target the actual test was done against Su-15). I might test, but I would bet R-27T/ET is superior on all situations. R-73 on other hand has charts that were also tested against Su-15 and show much shorter ranges then we see with KOLS in DCS. I would bet its seeker is also InSb, and it also uses a cross type seeker. But by virtue of being smaller must just not be able to compete with the much larger 14 element PbSe seeker of the MiG-29 (14 element in search, 6 in tracking though). Thing is PbSe and InSb also see different wavelengths, it is assumed that InSb is much better at seeing a heated up airframe and thus better front aspect, while PbSe mostly looks for engine plume, and thus is much worse at front aspect and primarily good for side and rear aspect. In this brochure. 36T is original R-27T/ET seeker. While it gives 15 km for front aspect, similar brochures gives 10-12 km for R-73, which if we compare to a chart for its seeker, is quite very optimistic I know someone online who was able to scan German documents in an archive that also has a 360 degree graph of R-60 seeker acquisition, which gives a very good idea of the head on/side/rear aspect abilities of PbSe. In that graph, R-60 does about 1.3 km head on, 1.6 km side on, and 4.4 km rear aspect. For AB its front 2.4 km, side 3.2 km, and rear beyond ballistic range. So you can see this is far below KOLS Fun fact, IRST sensor is exactly like radar in that it only needs to move 50% of the angle needed. So to look 30 degrees in one direction, both sensors only tilt the mirror/antenna 15 degrees since both are “cassegrain” type sensors.