AeriaGloria
-
Posts
5893 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by AeriaGloria
-
Hello, before the FM change for the MiG-29 FF, this maneuver was pretty easy, a hammerhead turn described from a western pilot who had a flight in MiG-29 by Menitsky shortly after the end of the Cold War. I remember this maneuver working really well, but it seems now the roll in the same direction as yaw is too powerful. I know this is related to or a direct cause of too strong of Lateral stability, so perhaps lateral stability is too high. Perhaps this has some knock on effect such as on the autopilot oscillations that are occurring. And perhaps my piloting is just not as good and someone else can do it much better than me. I thought to atleast mention while the autopilot oscillations are being worked on Description of the maneuver “ At 500 km/hr (270 kts) indicated, I began a 4-g pull and continued bringing the nose up until the aircraft reached an 80-deg pitch atti-tude, at which point Menitskii said "stop" (which is Russian for "stop"). I then held that nose position without changing the throttle setting and let the airspeed decay to around 250 km/hr (135 kts), at which time I briskly applied full left rudder and enough opposite aileron to keep the outside wing from picking up as it generated extra lift in the yaw. I could feel Menitskii on the controls with me intermittently throughout the maneuver. The nose of the aircraft carved an effortless arc around the yaw axis during the float from right to left as the airspeed continued to bleed off, reaching a low of around 100 km/hr (54 kts) at the apex of the reversal. I felt in full control of the MiG-29 throughout this maneuver and could vary the yaw rate by playing the amount of rudder input. By this time, I could see enough of a horizon to complete the maneuver symmetrically using outside visual refer-ences. I allowed the nose to fall through as we headed back downhill, left the power where it had been set at the time of entry, and executed a 4-g pull to a wings-level recovery on a reciprocal heading,” MiG-29hammerhead.trk
-
- 3
-

-
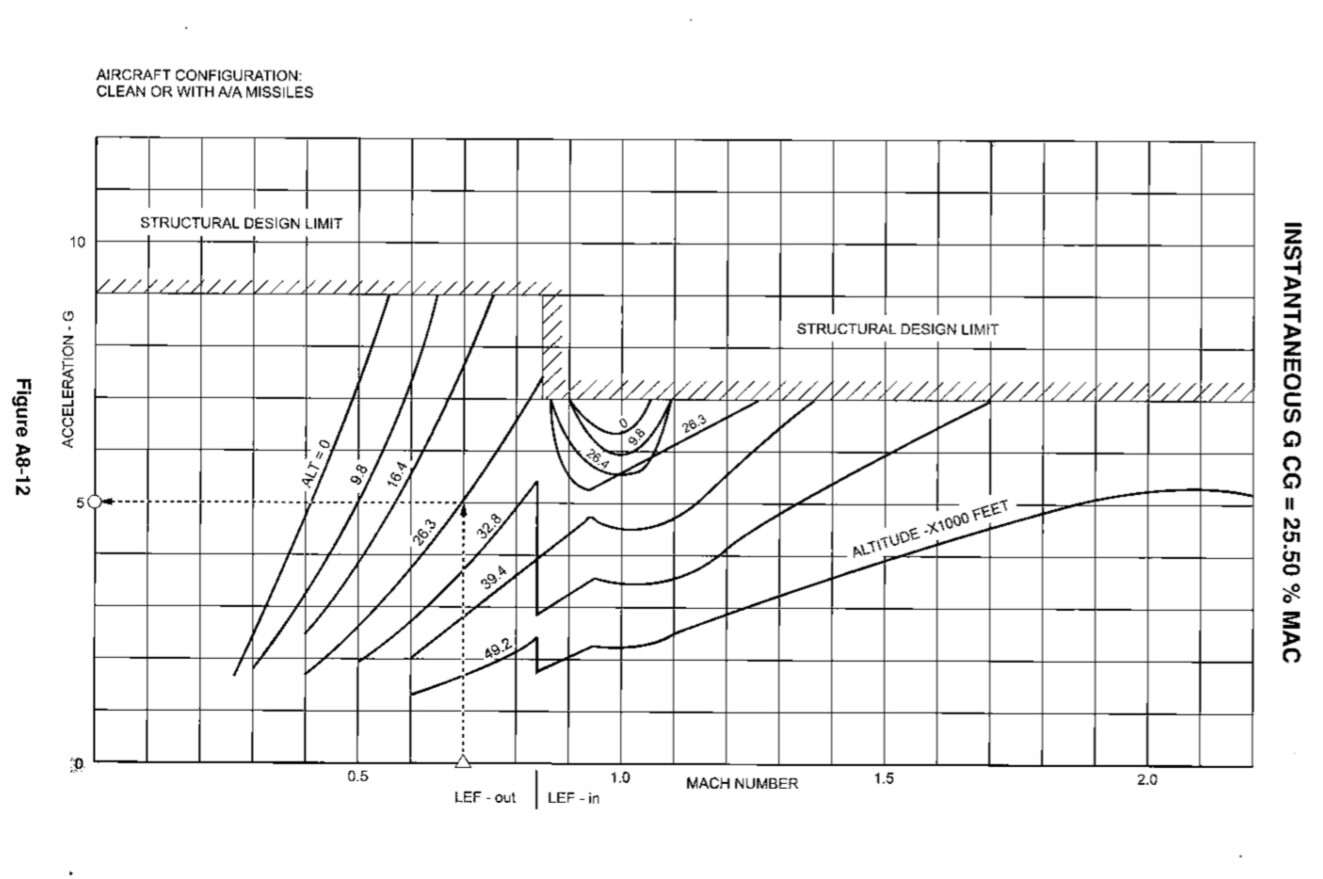
Okay here I focused on a slightly different aspect, the dip in G shown by the instantaneous chart at 0.85-1.1 Mach. This track should show whether at 0 km, 3 km, or 5 km, it is pulling too much G at Mach 0.85-1.1. I know that tuning a FM is often a “balance,” and that this may have to do with it often barely or not even pulling 9 G instantaneous at say 0.8-0.85 G at lower altitudes such as 1000-2000m which I demonstrated with the first track. In the “MiG-299G” track I instead tried to focus on the speeds it can hit 9 G from 0-3000m. Knowing per the chart it should hit 9 G at 0m from 0.55-0.85 Mach and 0.65-0.85 Mach at 3 km, I would say that the window it hits 9 G is just too narrow. Instead of hitting 9 G at Mach 0.85 or right around it, I would routinely have a huge jump to 9 G and over at around 0.8 Mach. It would then stay at 9G or over until perhaps about 0.05 Mach above where the chart said it would maintain it. So overall I would say it hits 9 G at too narrow of a speed below 0.85 Mach, and can hit too high of a G from 0.85-1.1 Mach. Granted, the behavior is much more accurate and superior then it was before the FM was adjusted for FF release (which debuted with the FC3 module the patch before the MiG-29 FF release), I just think it needs a little extra touch to reach the DCS standard. MiG-29goverload2.trk MiG-299G.trk
-

SPO-15 and Radar Problems MiG-29A Fulcrum
AeriaGloria replied to VinntoreZ's topic in Bugs and Problems
I didn’t expect the categories to be much trouble, I think the main thing with the categories is exactly what we saw above, being confused with the original FC3 categories. In which case, it’s simply a matter of time for people to get used to it, as well as the fact that by not having the frequency range to cover the EWR/AWACs categories of the original FC3 SPO. The newer/realistic categories also help you learn a lot about radars in general, getting pulse and CWI signals when a 3rd gen guides a fox 1. HPRF signals confused as CW signals at long range. As well as extra features, for example being able to tell if a F-15/16/18 is close or far away simply by seeing if you have a flashing X or an “F” symbol. Other inaccuracies are similar, for example the elevation lights will only trigger at short/medium range, but that also tells you something about the contact. You have a flashing light that estimates missile range from SAMs, and if aircraft are confused as SAMs ( the aforementioned case of flashing X) you also get an estimated missile range. It won’t always be correct, but with some practice you can begin to learn how dangerously close you are by checking category, signal strength, and where the flashing signal strength bar is. For example with F-15/18, the flashing bar is around 45-50 km, which is close to a long range sparrow shot. Both will show F category within 20-25 km, giving you an indication of “I should either be in attack position or running.” The signal strength bar amount is now exponential compared to linear, but again with practice you will soon realize what is danger close. Things I would consider significant weakness compared to FC3 is that it shows you being in the notch in an unconventional way (50 and 90 light together) and only at WVR ranges. You could make the argument however that teaches better and more realistic habits of using EWR for your notch angle, as well as telling you if you get these 50/90 lights together, the enemy is danger close. Once you get the hang of it, I feel the only true weakness becomes not showing launch and not working with radar. Of course YMMV, but I would implore that it even took us time to fully understand original SPO-15, and understanding this one may take longer but be more rewarding and often give you more information then the original that only showed “P” and one light for every fighter at every range. -
With more testing here is what I can tell. At 0m, it matches charts well At 3 and 5 km, it also matches charts well However, the main issue is something we don’t exactly have charts for, which is the region from above 0-2 km, more specifically around 0.5-2 km. I think one thing going on here is that ARU begins is at its smallest amount of deflection from 870-1200 kmh between 0-2 km. Above 2 km, it begins to increase deflection again. At 0 km, it is just enough authority to match the charts well. However once we raise altitude between 0 and 2 km, the authority is not enough the slightly thinner air. What surprises me most is how big the difference is, at 0 m it has little issue often pulling more then 10 G, and hitting 9 G over a significant range. At say 1-2 km, it will almost never go over 9 G, hitting 9 G at a very narrow range of speeds (920-940 kmh) if that, and often being limited to 8-8.5 G or less at 1-2 km between 870 kmh and Mach 0.85. The instantaneous G chart indicates it has no problem hitting 9 G at 0 km from 0.55-0.85 M, at 3 km at 0.65-0.85 M, and 0.75-0.85 M at 5 km, which gives the impression it should atleast have no problem hitting 9 G at say 0.5-2 km from perhaps 0.6-0.85 Mach, which is not the case in game. I am very surprised if 500-2000m is enough to make that much of a difference.
-
SPO-15 and Radar Problems MiG-29A Fulcrum
AeriaGloria replied to VinntoreZ's topic in Bugs and Problems
As mentioned, this is for old an incorrect FC3 SPO. On our more realistic FF SPO, if you reference the manual it will explain the categories 1. there is no EWR/AWACS category as they are outside frequency range. This category is actually for pulse radars 2. Most pulse Doppler 4th gen jets will be confused as a low power MRSAM/Hawk at long range. To show that it sees a low power Hawk, SPO will show flashing X. When the 4th gen gets closer, it will be properly identified as F, but still show flashing X. 3. There is no launch warning in DCS as SPO-15 only does this for Nike Hercules. Some pulse radars will only show P when launching Fox 1 as P is for CW Illumination, but this isn’t always the case 4. F-14 is the one exception among pulse Doppler radars as it functions differently, in which case it will show X at long range and P+X categories when within about 60 km as P is just for the CWI of Fox 1 guidance, which is often left on in F-14. The manual will explain much more -
Hello, I’ve been testing the new SPO-10, and I do love the physics based approach of the newer SPO-10 and SPO-15! However, it does seem to be missing one function from the changelog. Hopefully, this function was simply not added to the build. “At high signal power level, particularly against slow-scanning radars you will see the effect of side lobes passing over (either multiple pings, or visible gradual increase and then drop in power level as evidenced by additional sectors lighting up and dropping while the sector closest to source stays lit).” If this is modeled and I simply do not see it, please let me know how I can see it. Here are two tracks one of high and one of low closure SPO10lowclosure.trk SPO10high closure.trk
- 1 reply
-
- 1
-
-
According to flight manual, the maximum permissible speed of releasing the chute is 310 kmh, so this may be a bug
-
DCS MiG-29A Screenshots and Videos Thread
AeriaGloria replied to kotor633's topic in DCS: MiG-29A Fulcrum
So, I have a read a few sources, and I believe I did misunderstand parts when it mentioned the aiming circle on a scale of +/-6 degrees and the aiming dot on a scale of +/-12 degrees. However I did find a passage confirming that this “asynchronous invisible” gun mode will function as long as lock is maintained. So comparing what we see in DCS with this, It would have been more accurate of me to say “the asynchronous visible gun mode allows aimed fire up to 6 degrees of lead, and the asynchronous invisible target mode allows aimed fire/lead as long as the target is locked.” I’ll amend the description. edit: Found an interesting mention in a manual. One manual here describes “enable asynchronous invisible gun mode when engaging a visually invisible target or when during attack the angles of moving crosshairs exceed the maximum indication value of the ILS-31 indicator.” Yugoslavian manual -
DCS MiG-29A Screenshots and Videos Thread
AeriaGloria replied to kotor633's topic in DCS: MiG-29A Fulcrum
A bit hard to force the AI for me to make a 6-12 degree angle shot. Manuals say that it allows 12 degree lead vs the 6 degree of normal, and while it says the “invisible” target thing, what’s funny is that I believe it also says even the regular gun mode is fine for invisible targets since you have the circle on target that simply needs to be lined up with crosshairs. So to basically try and “sell” its main advantage without confusing people who would wonder why its an “invisible” target mode when even regular gun mode works on invisible targets, I decided to mention the high lead advantage of it and demonstrate how to aim in this mode (even if the AI currently wasn’t giving me 6-12 degree lead shot), so that players would atleast be prepared to aim when they did need the high lead advantage. I was thinking of adding some of this information into the description about manuals referring to it as invisible target mode, but I already had a good paragraph in my description and I’m not sure how many people read them. -
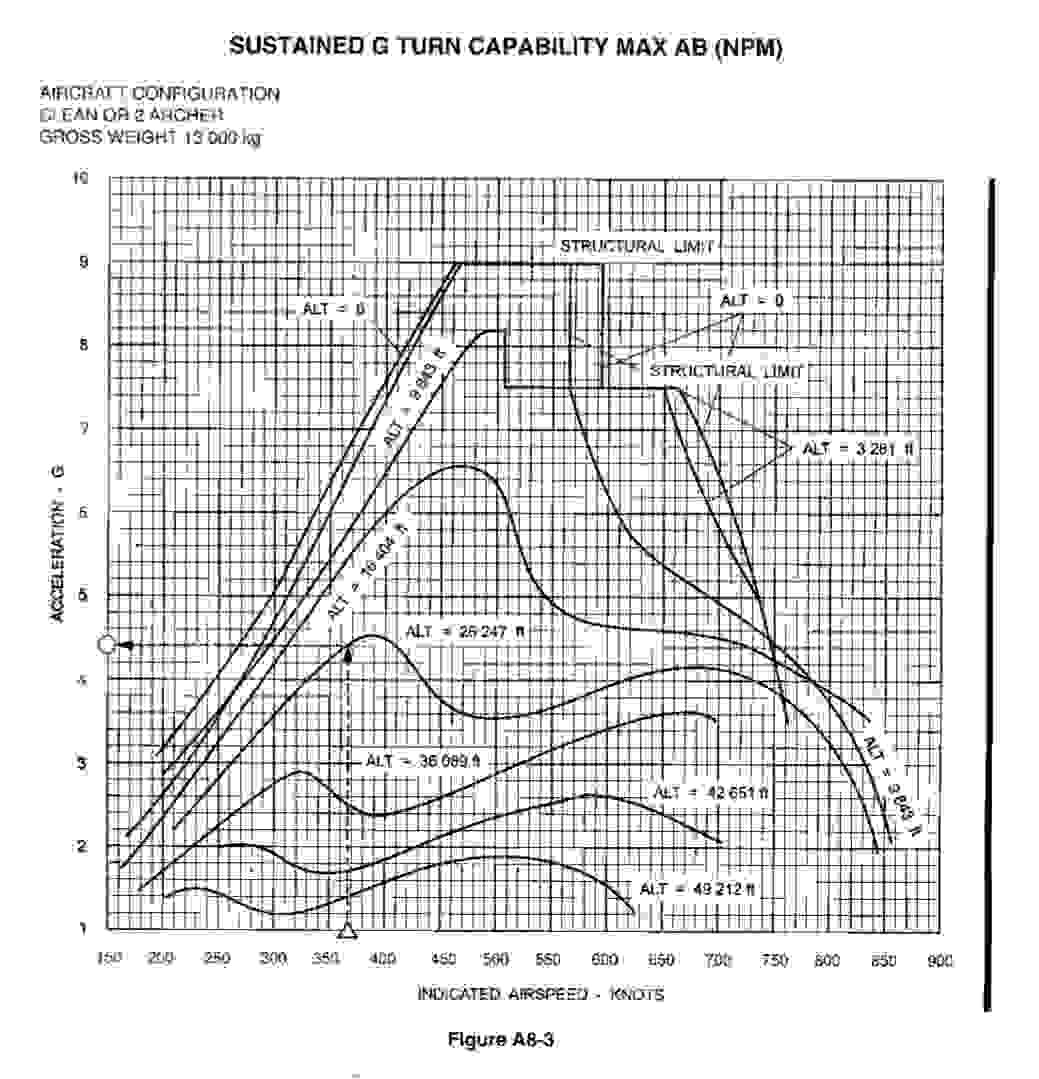
As we see from the charts I attached, sustained and instantaneous, it shouldn’t be
-
not planned or realistic New features of HDD?
AeriaGloria replied to UmamusumeMirage's topic in Wish List
It will always do nothing. It should never does more then what you see here. Lazur is basically a HUD mode with a guidance circle and target info/guidance symbols -
No, it would need Narcissus box and datalink antennas for that. This is just simulating what TACT switch does without any of the needed datalink equipment
-
Because I have 0 intention of using long alignment and pretty sure few people do as well lol
-
Above a certain speed a pedal stopper appears at 1/3rd pedal deflection that requires extra force to move the pedals beyond that point.
-
You could say it’s a digital analog hybrid. Atleast the data processing is digital.
-
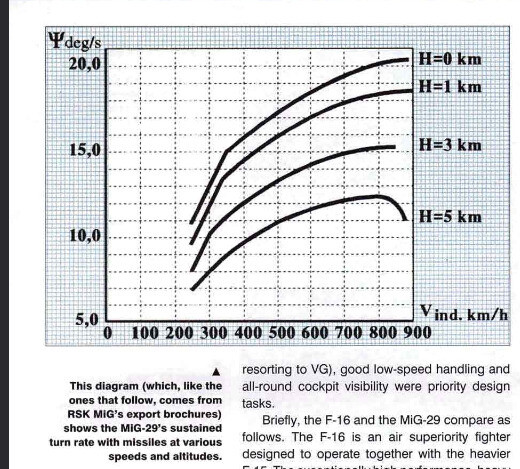
This is also about instantaneous turn. It should have no issue hitting 9 G at low alt from Mach 0.55-85. Mach 0.65-0.85 at 3 km. In addition the instantaneous chart and the two sustained turn charts show that it can reach 9 G at 900 kmh (20 deg/s) with atleast up to 2x Archer loaded. Doing that sustained, the instantaneous chart shows it should have some pull in reserve (not needing full back stick as it does now)
-
DCS MiG-29A Screenshots and Videos Thread
AeriaGloria replied to kotor633's topic in DCS: MiG-29A Fulcrum
The 4 uses of the control button or what is listed in binds as “Target Acquisition Button Depress,” basically if you press the TDC slew key on the stick. It allows you to manually turn on/off laser in gun mode, useful for saving laser life and to quicken the 30 second on/32 off cycle of the laser so you can re attack faster. What most are probably interested in is using it for KMOD ranging. When locked onto a jammer in radar mode or IRST locked while too far for laser or avoid radar ranging in COOP, you can use KMOD ranging to get a one time range with estimated closure. It also functions as a shortcut to turn TWS/TWF off if you do not wish to target the enemy it selects And also enables a sort of “High Lead” Gun mode that allows you to aim the gun with up to 2x the lead angle of the regular gun mode! -
That does look odd. What about your AOA gauge, it is frozen, is this the English cockpit bug this patch or is pitot heat or some other switch off perhaps? Either way, it’s stuck at 15 degrees, and with LEF flap down as we see in your turns the AOA limit should be 26 degrees. When it hits the AOA limit the stick and elevators are automatically tilted down 2 or 15 degrees depending on speed. It becoming “awake” part way into the mission also makes me suspect pitot tube freezing. Pitot tube freezing could also affect ARU and reduce elevator authority at speeds where it shouldn’t reduce it so much.
-
Hello, it seems to be that MiG-29 can not reach the stated instantaneous G load, and it is low enough that it also can’t reach the full envelope of the sustained turn rate numbers. Here is a track with 2x APU-470, and 2x R-60, and 50-55% fuel in order to reach 13,000 kg gross weight, which seems to be the most common testing metric other then the same with 2x R-73. in addition there is a max G load graph we see in both books and manuals that goes from below 300 kmh to 900 kmh, showing over 20 deg/s at 900 kmh “with missiles.” And there is a sentence in the “practical aerodynamics” manual that states: “For example, the maximum speed of turn in a steady position of the aircraft without weapon mounts at an altitude of 1,000m, Mach Number 0.8, with 50% of remaining fuel (aircraft weight 13,000 kg) is 19.5-20° a second.” Partway through the track I also jettison the R-60 to show a “without missile load” configuration. Images are from Yefim Gordon or GAF TO-1 from Amazon. According to instantaneous turn chart, we should approximately have little issue hitting 9 G at lower altitudes from around Mach 0.55-0.85, or around 700-1000 kmh at lower altitudes. And above this speed the transonic zone is reducing elevator authority until around Mach 1.05-1.1 (according to practical aerodynamics.) Instead, we are limited to basically 8 G from below 900 kmh, which should be our maximum rate 9 G speed. MiG29gload.trk

-
Hello, F-14A 135 early shows up different then F-14A 135 and F-14B. Perhaps it just needs to be updated to 135 and B, I don’t know. 135/B shows as P+flashing X until it’s P+C during lock. 135 early shows as Solid X and F at a higher signal strength. One track “125early” is for 135 early, the other is 135 but SPO-15 would identical for F-14B F-14a125earlyspo15.trk F-14b135spo15.trk
-
- 2
-
-
I get the feeling ED is referring to MPRF even as HPRF, basically, anything above LPRF, which was normal until the pulse Doppler age. Would love if anyone could tell me if this is feasible. SPO-15 in game shows same signal strength from front and rear antennas, however rear antennas are slightly weaker. I can upon a mention in a document about the bomber version of Beryoza which uses 16 identical azimuth antennas, so different then ours. However it says this equalizes signal strength between adjacent zones, so I wonder if this causing the equal signal strength, if it is in fact a real characteristic. Also helps explain why 85-95 degree emitter only does up close close beyond just being in side lobes. “The station is equipped with protection against false triggering of the receiving channels by weak signals received on the side lobes of the azimuth antennas. To achieve this, the input signals of all 16 channels are summed, the resulting signal is inverted, attenuated by a factor of Kpod, and fed as a suppression signal to the input circuits of all channels (Fig. 3). Signals received on the main lobes are attenuated slightly, while weak signals are suppressed. The gain of the suppression circuit, Kpod, is selected such that the signal reception areas of one sector and two adjacent sectors are equal.”
-
investigating Bombing solution seems to use Barometric Altitude only
AeriaGloria replied to ldnz's topic in Bugs and Problems
TOSS should still work, it uses same calculations as CCRP launch. After laser ranges and pitch up, the gyros remember long enough for the maneuver, or atleast, combat manual does not claim it functions any different and idk why it would need to. I would like to see if backup radar altimeter ranging works, but this seems to get in the way. -
Will upload track soon if I can, but pretty much see exactly what Kuky sees in his track. But the odd thing is, in invisible target gun mode (press ‘target acquisition depress button’ when in regular gun mode, allowing 12 degrees of lead rather then 6), this mode is incredibly precise. Bullets always right in center mass. This mode doesn’t highlight target but just shows a circle to put your crosshairs for perfect lead ( there is also a dot that does the same thing but more precise, when you have perfect aim and tone the dot will be in the middle of the crosshairs while the crosshairs are in the middle of the circle). It’s an option for those struggling with accuracy in the main gun mode atleast
-
There is also no way to disable proximity fuse. So if you intend to use missile against ground, the more vertical the attack the better so the proximity fuse isnt triggered too early. But who knows about DCS
-
Very nice!