AeriaGloria
-
Posts
5874 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by AeriaGloria
-
Where was this post about SPO-10?
-
I KNOW it affects the information calculated on lock without range like with jammer or IRST with no laser/radar, and adjusts closure estimate for KMOD. I’ve been meaning to test its effect on IRST, I don’t see anything on the TP search screen, but I haven’t don’t any practical testing. Would be interesting if it effects HMS in some unique way
-
No you’re right, I think it’s 60 seconds to fully cool down. Funny you ask that, I have read no document that mentioned how long they cool. I’m sure if I looked in the right place I a could find but I wouldn’t be surprised if it’s like 2 hours.
-
I’ve had the same experience. The whole thing should be parallax corrected also
-
It’ll show up sometimes when you use coop because coop is often considered an “anti jamming/counter counter measures mode”
-
It is crazy how fast TWS can lock on as it sees a target within missile range Thanks for the testing. I can say manuals do say to keep AP/AJ on all times you use the radar, so I expect ED to expect it to be on atleast for 100% functioning. Lock on after launch does work, if you lose lock and missile hasn’t hit yet, regain it! Also, IRST should maintain lock no problem and give missiles with radar in ILLUM if it’s just picking up the lost lock. The whole dummy part is only needed to get the radar cooperation in IRST mode in the first place.
-

Special Options FFB tuning
AeriaGloria replied to Raven (Elysian Angel)'s topic in Controller Questions and Bugs
The controls aren’t impacted by air flow. But there are graphs and numbers showing strength depending on deflection and ARU and COC-3. -
I have not noticed much drift without RSBN correction. It should be around 4% per distance flown without RSBN and about 800m + a bit for the distance to the beacon with RSBN. How about this, set up to have an RSBN that your nav system corrects off. And you’ll only ever be around 800m off.
-
I plan to test from 5 degrees below the target so they can’t notch
-
Yeah kinda hard to say when they are all just 4 antennas with amplitude comparison
-
None are listed. Also depends what software they want. 9.13 era software instance has double rack bombs and S-5.
-
Can someone explain this behaviour? (Pitch oscillations)
AeriaGloria replied to Lixma 06's topic in DCS: MiG-29A Fulcrum
You sure? I’ve experienced it in both -
Can someone explain this behaviour? (Pitch oscillations)
AeriaGloria replied to Lixma 06's topic in DCS: MiG-29A Fulcrum
The AOA limiter well move the stabilizer 2 or 15 degrees down depending on speed. When you are more then 2 degrees below limit the AOA limiter will shut off. -
I has no center function
-

-
Great job! I would love to have someone from ED look at this post! Very convincing!!!!!
-
To me I’m surprised that manual says chaotic readings but we don’t have that. And that MPRF works just as badly
-
Cockpit indicators before cold start mistakes
AeriaGloria replied to Logan54's topic in Bugs and Problems
Have you read something that states these instruments don’t need electrical power to work? I know a few need electricity like due gage or the VSI to spin a wheel and read the air data system (which needs power of its own.) -
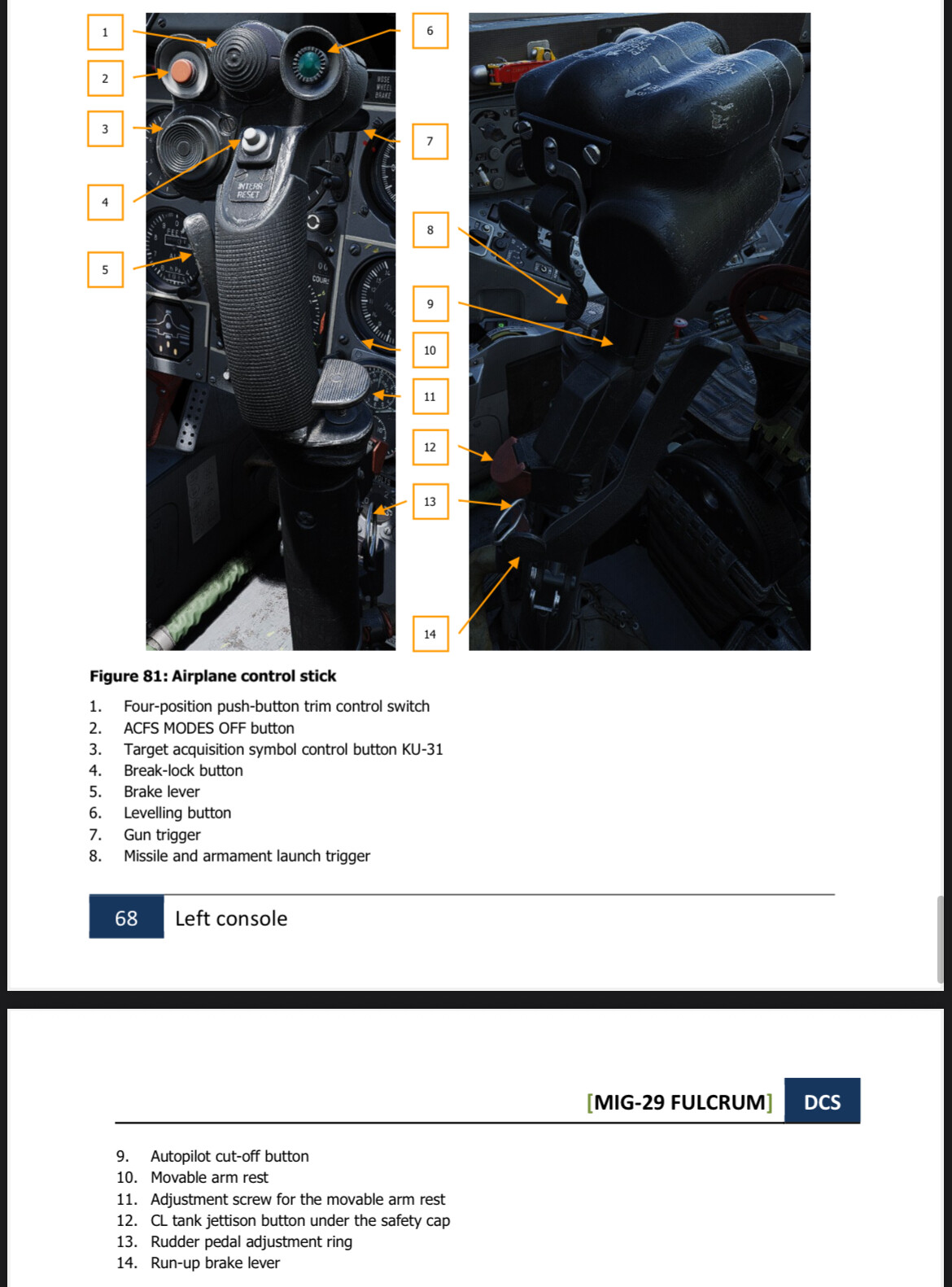
If you press the TDC slew rounded on the stick. If in gun mode it changes to alternate 12 degree lead (cs 6 degree led limit) mode
-
Funny, target acquisition button switches between a different gun sub mode!!!!!!!!
-
DCS MiG-29A Screenshots and Videos Thread
AeriaGloria replied to MiGCap1's topic in DCS: MiG-29A Fulcrum
If you want to know what the “r” symbol is on the HUD the manual doesn’t explain, watch this. It’s short, only 1.5 minutes -
It wasn’t false translation but bad paraphrasing by memory. I remember it said “may happen”
-
Radar losing lock way too easy in all modes.
AeriaGloria replied to LaCiKa's topic in Bugs and Problems
Anyways, since it’s here, in this video I talk about 1100 kmh limit and how much of an angle is required to defeat it, and what it means for coop. -
It should make the radar itself more immune to chaff and glint. Right now we can’t really see how glint or chaff might be sending into memory mode for a second or two.
-
Radar losing lock way too easy in all modes.
AeriaGloria replied to LaCiKa's topic in Bugs and Problems
I have no problem posting tracks. I just thought it was “Bugs and problems” not just “Bugs.” In addition I was trying to find a post that already had tracks posted. But appears to be removed or merged, and all I wanted to do was add detail to this post that has a track. I wasn’t trying to report an issue, and that post was here. Also. Half or more then half of the threads on this first page of “Bugs and problems” have no track, so sorry if the enforcement seems uneven.