Snappy
-
Posts
1176 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Snappy
-
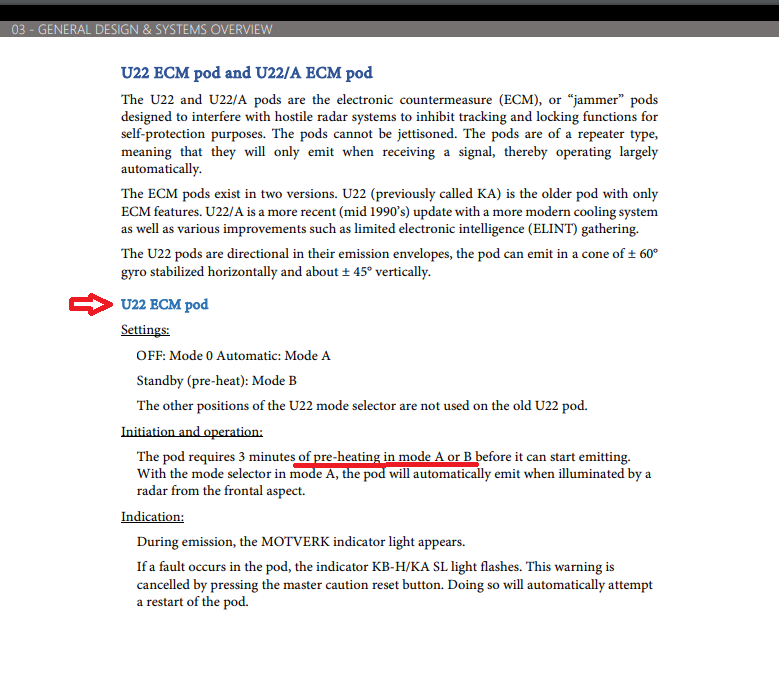
With all due respect @Zabuzard, your mentioned own manual says otherwise or is written wrong , the page for the older U22 pod says the following: null Regardless of that , the U22 Pod does not pre-heat in mode B either . Its broken completely. Kind regards, Snappy

-
Hi TOViper, sorry forgot to write that , latest OB, MT version.
-
Hi @TOViper , yes It was like @razo+r wrote , there used to be a slight discrepancy on the compass rose on the ground and once aligned with the runway centreline you could press the reference button and see it snap onto the correct course. It was only a small correction, maybe 3-5 degrees max. But it could well be that this initial discrepancy has become eliminated by one of the patches and the compass rose is now always spot-on by default, I just re-familiarized myself with the Viggen after quite a while. Like I said, in the air the reference button works and performs its function in regards to altitude setting like it should. Regards, Snappy
-
I tested now in several different mission and setups. The older U22 jamming pod seems broken. After a cold start it does not warm up neither in mode A nor B , the KB-H/KA SL light never comes on. Neither does the MOTVERK light. Also it does not work if you set up a mission where you start airborne already. And if you get targeted it does not jam at all. The newer U22/A pod seems to be working ok. Kind regards, Snappy.
-
Hi, has something been changed with use of the reference button on ground? I used to be able to press it once aligned with the runway centerline and you could see the compass on the central indicator do the manual update/correction and snap to runway heading. The manual also mentions that function , the manual course setting: "Manual course setting If needed. Press Reference button (on stick) after carefully aligning with the runway heading." This no longer seems to work, you can press the reference button, but nothing happens , the compass rose does not adjust. In the air the reference button works as it should. Can somebody confirm this? regards, Snappy
-
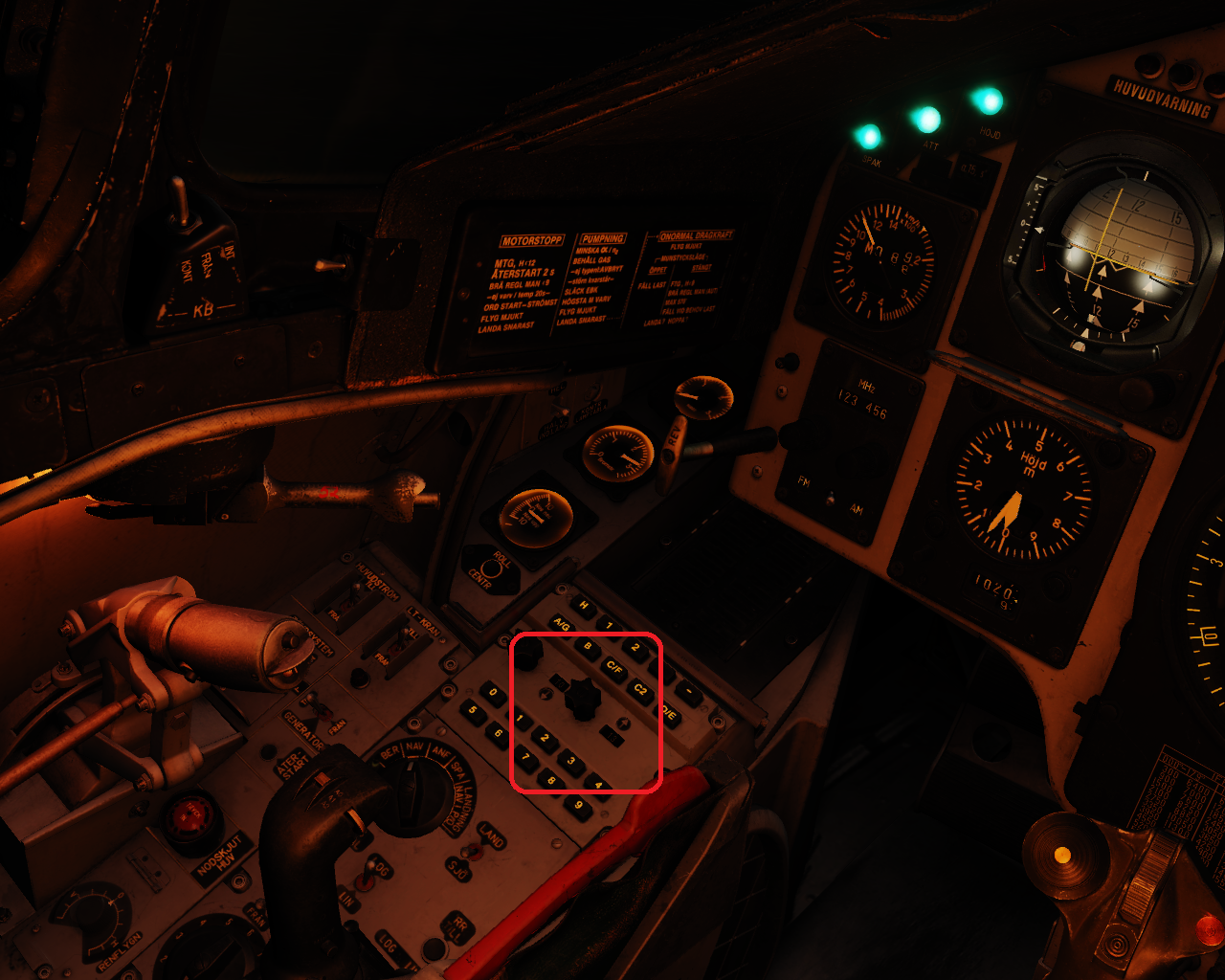
Hi, not sure if this is tracked already, a cursory forum search came up emtpy. The FR 22 radios group and base number indications are not backlit by the instrument light setting like they should. In DCS at night, with instrument, panel and floodlights full on , they look like this: Compared to this picture from the Viggen Simulator from F 15 wing , @SwedishWaffle,hope its ok, if I use your pic from reddit for this: And also another one from the simulator at NYO, also shows that the base and group channel numbers are backlit: My picture from latest open beta, multithread variant. Would be nice if this could get fixed , because its kind of annoying at night, having to use flashlight or zoom in alot just to read the numbers while droning around at low level .. Kind regards, Snappy
-
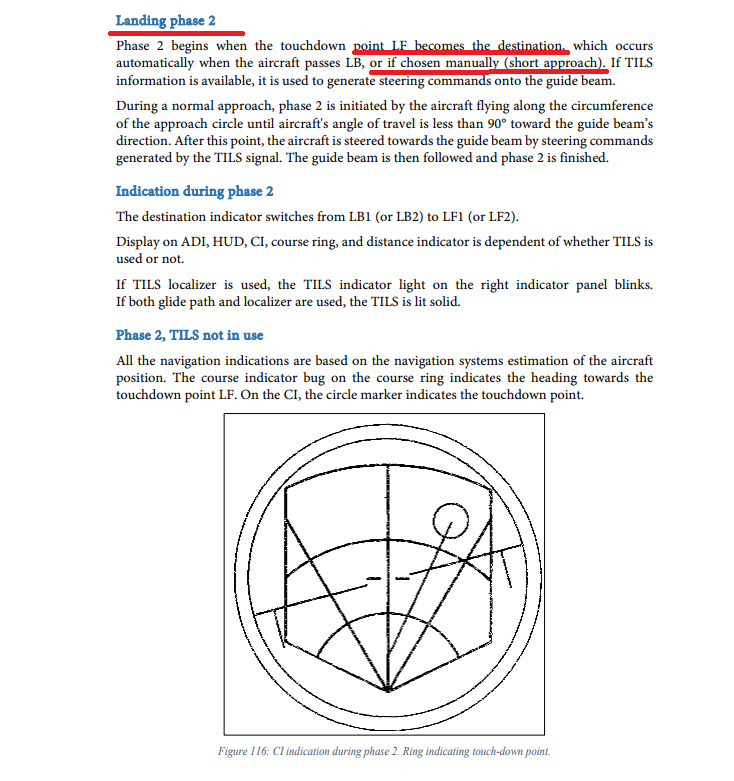
ViggenFlipFlop.trk There is a bug , the system wrongly shows LB as destination waypoint for landing phase 2, when it really should be LF. The first pic is in phase 1, I have just switched to LANDN NAV and correctly it shows LB 1 as destination. The second pic is just a moment later, after I performed the flipflop from LANDN NAV to LANDN P/O and back. On the radar display you can see that the system correctly shortened the approach as intended, but the destination Waypoint is still wrongly shown as LB1. Third pic is from the new 2.1 beta manual page 151, which shows that during phase 2, the landing destination waypoint should be LF. I also attached a track, but not sure how well Viggen replays work out. Kind regards, Snappy
- 1 reply
-
- 3
-

-

-
Hi, there seems to be a bug in the radar system rendering .The visualized sweep on the scope seems to be wrongly coupled to the existence of radar returns on the scope. I don't think this is correct. If you manually move radar antenna far upwards , after a certain point (when no ground returns are painted anymore) the beam itself completely disappears too and stops sweeping. Alternatively You can also leave the antenna elevation untouched and pull up the aircraft itself 90 degrees vertical pitch , same effect. Once the radar no longer paints any returns, the sweeping beam itself disappears. Happens in A1 and A2 mode. I really dont think this is correct. Of course it's correct that there are no radar returns after a certain radar antenna elevation upwards, but I don't think the radar itself should stop sweeping/showing the beam , just because there are no returns at the moment. I attached a small track from the caucasus instant action mission "airborne intercept" - but not sure how well viggen tracks play out. In the track I first showed the 90 degrees pull up version with antenna elevation untouched , thereafter I levelled off again and then manually adjusted antenna upwards till the sweeping beam disappeared again . In case the track doesnt work correctly, please test the two above methods. Kind regards Snappy ViggenBeamUpwards.trk
- 1 reply
-
- 1
-
-
@Silhou Silhou, please kindly add the track and material from @Some1 to that bug report, because he actually tested the pipper calculationin a very controlled environment, with constant target G and closure. See his original bug report: Kind regards, Snappy
-
Really interesting bit about the exchange flying in the Viggen, thanks a lot! I wonder what he means , when he wrote the swedish pilot flew a hands off 4 degree approach , with his hands literally on his head? 4 degrees is probably the approach descent angle,ok. But I thought the autopilot couldn't do approaches in the Viggen? Or was that changed in the JA variant? Regards, Snappy
-
The keyboard keybinds for HUD brightness increase and decrease do not seem to work. I also tried deleting them and assigning different keys to them. Still the HUD brightness doesnt change. Even after pressing them for a long time. Only method to adjust HUD brightness is via the clickable brightness dial below it. Regards Snappy
-
Radar gunsight in ANT does not calculate sufficient lead.
Snappy replied to Snappy's topic in Bugs and Problems
Yea, well, sorry but that is no solution. If the target is not maneuvering , you don't need a lead computing sight all. The very purpose of it is to provide a lead calculation for you. It's literally in the name. It cannot compensate for erratic , constantly jinking targets no, but in this case the target is flying a steady horizontal and very predictable turn at a constant low G. Ideal conditions for a lead computing sight. -
Ok, yes, fair enough, I can understand that line of thinking with the purchase salvaging. Thanks for explaining . Hmm no really good way to go about it then. I don't have the answer either. Personally I decided not to buy anymore from EDs own module lineup , until they improve a lot on product bugfixing and core. I'll stick to 3rd party with better track records. But everyone gets to make their own decision of course.
-
Radar gunsight in ANT does not calculate sufficient lead.
Snappy posted a topic in Bugs and Problems
Attached are several short tracks with a practice F-14 target set up to fly steady horizontal 2.5G circles and me aiming for the radar target dot with the gunsight in ANT mode and the target locked on in radar and within effective gun range. Still the rounds pass behind the target. 2.5 G is not much of a turn.If you want to score hits you have to aim further in front of the radar dot. The problem doesn't get better with even higher G turns of the target. If you would aim for target center mass (like you see on guncam photos, with the pipper squarely on target center mass) the rounds also would pass behind the target. Mission file is attached, in case its needed to play back tracks. Kind regards, Snappy F1RadarTGTgunsV1.trk F1RadarTGTgunsV2.trk F1RadarTGTgunsV3.trk F1MirageGunsFighter2.miz -
Well then you can still wait with future products ,until they are available via 2 week trial to see if they meet your personal expectations- Again, the A10C-II, is not only product , nor the first product of ED that stayed feature incomplete and bugged for a long time after initial release. I just brought it up as an example, because Shlomo made it sound a bit like - "it was just an update and updates are different to module releases"
-
What kind of argument is this? A-10v2 was also „just“ an update to an old module. The buyers are still waiting for the promised ARC-210 radio for it after 2 years. Just got delayed again.ED still hasn’t completed that simple „update“ after 2 years of release. That might have told you something. Anyway, I agree ED could do a lot better, but again, it’s not the first time and if you keep buying unquestioningly into their modules without waiting for reviews, don’t be surprised if their modus operandi doesn’t change and you have buggy and feature incomplete software for longer periods of time.
-
Understandable, but why did you buy into it in the first place? I mean, its really not the first time ED did a incomplete , buggy and rushed rollout of a module/update and sometimes I do wonder why people are still so fast to throw their money at them unquestioningly after EDs track record , instead of waiting how good/complete it actually is in release state and how much bugfixing attention it gets from ED. Low price or not .
-
Uhh but that’s feet, not meters .You’d need about 2000 more .Not sure I follow your take off performance calculation anyway . Probably would need to match your smoking habits for that.:) Not to leave you empty-handed , I found this old video from the german armed forces . Its in german, but you can at least use the autotranslated YT subtitles. Ignore the cheap attempt at Top Gun vibes, but it gives a few interesting glimpses of the F-4s radar screen at work while scanning for /locking a target and the gunsight in action, plus some short but nice air combat maneuvering training scenes .
-
Hey, yes I have that Image too . It’s a nice one! The Problem is currently in the Aerges F1 , if you fired with that sight picture, the rounds would miss the target and pass behind it
-
Hi Ivan, thanks a lot and sorry for my late reply. For me it isn't really working.I tried replicating your picture with and F-14 as target and the pipper on its center mass.The gunsight seems to compute insufficient lead still. I will wait for the upcoming flight control update Fausete mentioned, to see if it helps getting more the nose more stable for steadier pipper control , right now the pitch still seems to want to oscillate slightly , for me at least. After that and I will probably file a bug report for the gunsight if there is still no improvement. Thanks again for all your detailed answers with those interesting pictures here! Kind regards, Snappy
-
That was my initial impression too, that the gunsight in ANT does not provide calculate sufiicient lead , even if you aim to put the pipper on the radar dot/square (which itself may be in front of target or on its body) . I will do more testing when I have some quiet time for that.
-
Hi Ivan!, thank you very much for explaining things in such detail and also for sharing these guncam pictures. I really enjoy your posts! One question for my understanding, regarding your first pic, the one with pipper on the F-14: If this was a steady sight picture and the pipper had stayed steady for one second already and let’s say instead of the targets left displacement, you would be in the same plane of motion, so the target would be along your gun centreline. If you now pressed the trigger , would you expect to score hits? Or is the pipper too far aft on the Center of the target aircraft body?Would it be considered a valid shot? thank you very much again for sharing from your experience! kind regards, Snappy
-
@IvanK, thank you very much for your detailed reply&the interesting pictures ! Fair enough with criticism of steadier tracking ! When I have the opportunity I will try again and try to fly with a steadier pipper position. I don’t doubt what you wrote , but was really suprised about the 30% hit rate under steady perfect tracking. I have to look it up again , but I think I somewhere read about the criteria for valid gunshots during Red Flag in the 70s and it required only very few frames of tape with pipper on target. That seemed to imply, if the pipper was on the targets the rounds were going to hit. @fausete Thank you. I’m not at home at the moment, but I can check in the next few days , but I’m reasonably sure , I was a lot closer than 1600 m in my tracks. I will try to do another run with steadier pipper control , but I still feel the gunsight in ANT is calculating an insufficient lead value under steady conditions.Would be really nice if you could check it. Especially since it is supposedly able to provide accurate solutions under IMC( the mentioned blind shooting) I don’t see this happening with the current implementation. In a few days I hope to have a better example track. Kind regards, Snappy
-
New short track, with the pipper aimed on the orange radar target square (which btw is not necessarily always in front of the target, sometimes it was on the target body or around wings).Still the rounds fell short. F1RadarTGTguns.trk F1MirageGunsFighter.miz
-
Hi @IvanK , thanks for the info. Posted 1 minute ago Hi @IvanK, thank you for your input. However in its current implementation, the ANT setting doesn't seem to work very well/ accurately, let alone for use in IMC/blind shooting. Or I'm seriously misunderstanding something in regards to symbology. Could you kindly take at the attached track? I also attached the mission file in case you need it for the track to work. Its a canned setup, the target is flying steady 3G left turn-orbits and I tried to zero out closure rate . I flew as accurate as I could,trying to put the pipper center on the target when firing. Still of all the bursts , all rounds fired except a single one, seemed to fall significantly short.They did not even hit further aft of the pipper position, but missed target completely. In my understanding, it should've been optimal radar solution conditions, with constant target G, no target plane of motion change and zero or little closure rate. Am I doing sth wrong or is this a bug? Thank you , kind regards, Snappy F1MirageGunsFighter.miz F1Radarguns.trk