Rosebud47
-
Posts
648 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Rosebud47
-
When setup as seated, not room scale, then there are no bounderies. Always had the Odyssey in room scale. Didn´t like 3DOF....6DOF feels more natural to me. Oh, I think the slider to set up the visibility of the bounderies, was for the Vive in Steam. But there is also an option somewhere for the Odyssey for setting the bounderies to invisible.
-
There is somewhere a slider, I don´t remember now exactly, where to find...SteamVR settings?... anyway, there is a slider with which you could adjust the visibility of the bounderies. If set this slider to zero, the bounderies are invisible.
-
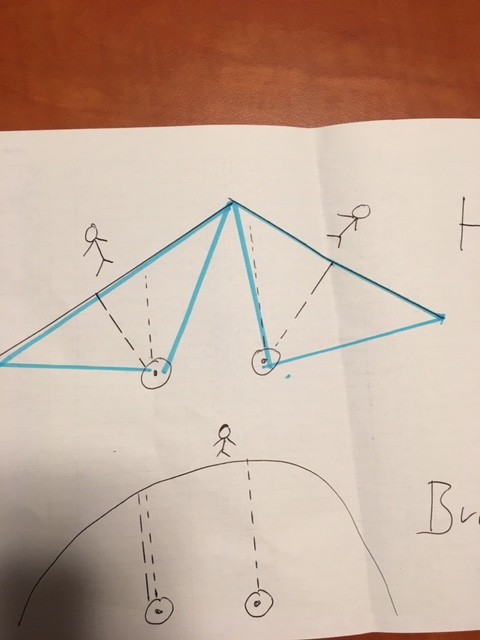
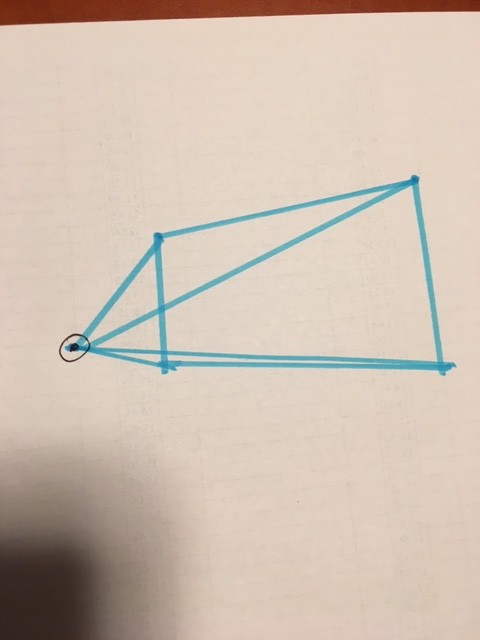
N`Abend, we were not so much off, of how it works, I think. But there´s a difference. The viewport or let it describe as the virtual cameras in the virtual reality are determined by the screens and are looking to the screens. ( see picture 4 ). Picture 5 only shows the viewport 3 dimensional. The perspective corrections of the pictures of the buildings is hard to compare with what we have in VR. But with the compositor there is also a correction done to the frames the engine creates, to make the frames match on to the lenses in the HMD in the way to correct the distortion resulted of the shape of the lenses ( which is comparabel to the building in the picture before and after correction ). The effect could be seen in the pictures of the A-10 is exactly, what could be corrected for the Pimax large FOV with editing the stereo.lua, what described before. The values I copied in, are more adequate distances from the eye to the top, bottom, left and right of the viewports for each eye, as seen in picture 5. The new SteamVr update now detects the frequency of the HMD, which is good, but so far no adjustment for the angle of the canted displays to correct the viewport and the focus line. But I´m pretty sure, that Valve provides a solution for the Index, but we have to see, if what works for the Index could also work for the Pimax with regard to the canted displays. "Parallel Projection" is very interesting, as we already talked about VorpX before. The Pimax5k+ is now my 4th headset and in the early times with my first, the HTC Vive, i played a bit around with VorpX. It was depending on the game, if VorpX works more like "fake" VR or "real" VR. Actually the lack of a information of the objects in the depth of the 3D space ( which the z-buffer provides ) forced VorpX into the "fake" 3D mode, if the application was programmed with z-buffer, VorpX worked like "real" VR. I think the "Parallel Projection" in Pitool does exactly the same like VorpX and makes the Pimax to run with games or application, which are not programmed with a z-buffer. DCS has got z-buffer programming, so no need for parallel projection. But interesting is, why the VRzooms seems to work in DCS with Parallel Projection with the Pimax. My conlcusion is simple: parallel projection ignores the position of objects in the depth of the 3D space and it looks like it also ignores the focus line of the viewport, which could also been seen as scale for the depth of the picture. There is actually no zooming into the depth of the picture on the focus line. What could be observed, when VRzooming with parallel projection is, that the things don´t appear closer, but more tiny than without zoom. This effect could be also seen in 3D cinema, when you watch a 3D movie with the shutter glasses. In the cinema the pictures of the movie also lack of an information in depth of the picture and in scenes, let´s say a landscape with a view into the far of the landscape, objects in this scene appear tiny as long as the eye has got a reference point from these objects to objects in "depth" of the scene. Compared to VR, 3D cinema is like "fake" 3D. Parallel projection should never be activated in DCS, it destroys the quality of depth information of objects in DCS and cost much more performance. Parallel projection also doesn´t work right with VRzoom.

-
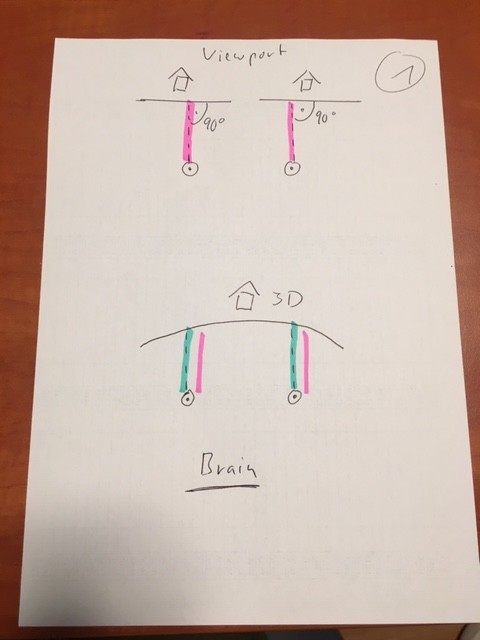
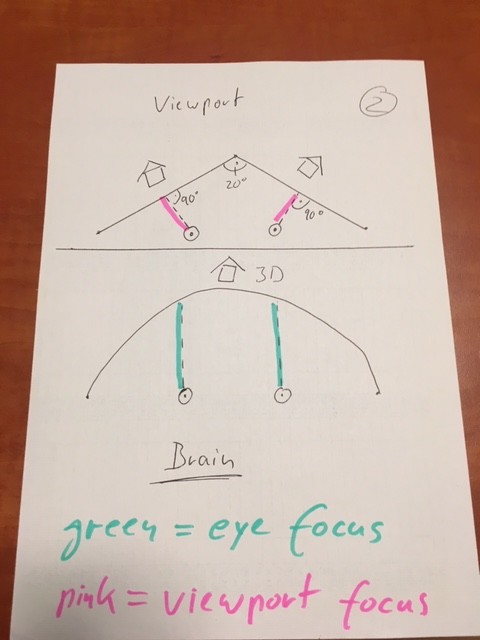
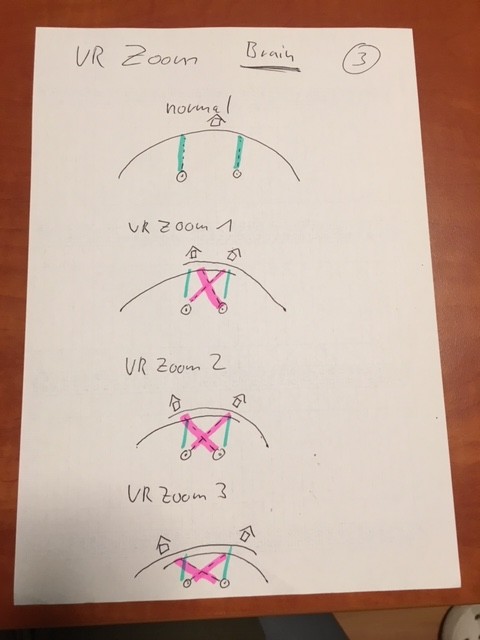
hmmm ... not to mix things up too much and keep it simple, I made some drawings. You have to excuse the bad painting, I´m a writer not a drawer. Picture #1 should show a planar HMD design. The perspective and focus of the natural view and the synthetical focus of the viewport are aligned. The brain surely takes the natural view to focus the eyes. Picture #2 should show a non-planar HMD or canted HMD design. The perspective and focus of the natural view (eye/green ) is always straight ahead. The brain always follows it nature, it could be tricked by synthetical distortation for a synthetical 3-D vision, but not, when its up to focus. Picture #2 is the normal view within the viewport of a canted displays. The brain simply don´t care for the wrong focus of the viewport ( pink ), which is still, like on the planar displays on a 90° angle. This is what in my opinion needs to be corrected in the viewport to maybe +20° for the left eye and -20° for the right eye to compensate the angle of approx 20° of the displays. This not so much of a problem, as we still could create one picture in 3D in the brain. But when zooming, things get off, because the VRzoom follows the focus-line of the viewport, which is not aligned with the natural view. The brain now tries to adjust the wrong angle of the viewport focus to the natural eye focus, which result in an overlapping 3-D picture. Picture #3 should show the process of VRzoom and what we could observe, while zooming with the canted displays, in which the synthetical viewport focus line is not corrected to natural focus line of the eyes. The brain forces the focus the pictures of the left and right eye, to be in line with the natural focus line of the eyes and creates a wrong picture. Not to get me wrong, I ´m not a programmer. DCS is my beloved hobby, but for my real life, I´m too very interested in Virtual Reality and hopefully soon, I could afford a Insta360 Pro VR camera, which films in VR in 8k resolution. Man, you should really get a VR headset soon, it´s such a great thing in DCS. I won´t never miss this.
-
Very interesting talking, twistking! I think, I was wrong hoping the Pimax to be integrated completely into SteamVR, as now, without SteamVR, Pimax with Pitool only seems to run much better. You´re right, that the distortion not only is a factor for the 3D effect, but also the correct distortion for the viewport with regard to different levels of optical refraction of the lenses. I remember this was an issue due to developement of the Pimax, as on the outer sides of the large FOV lenses, there was incorrect distortion, but Pimax managed to fix it by software distortion correction. I think so far, if not specialized, all the VR API dealing with the same distortion level of lenses, screen aspect ratio and viewports, which until today, were always the same for the first generation of HMDs, like Rift CV1, HTC Vive. The WMR headsets, VivePro and Odyssey, were not such different with regard to FOV, lenses and aspect ratio and with only slightly differences in resolution, why the settings for VR with openVR implemented into the application still work fine and the same for the variety of first generation HMDs. Nowadays things change and HMDs going to differentiate more in the named aspects, what makes it need to have more option to recognize different aspects and adjust the software settingt to different kinds of HMD techniques. I am still thinking, this is done with the compositor/API, not with the game engine, for each HMD. In DCS so far could be identified only a few files files, corresponding to the VR pipeline: In the main directory c:\Programs\Eagle Dynamics\DCS World\bin\openVR_API.dll ... which might be the main file to translate the VR settings/resolution request from the compositor of specific VR hardware to the game engine and back. There is also in C:\Programs\Eagle Dynamics\DCS Wolrd\Config\Monitorsetup\stereo.lua ... in which some adjustments could be done to the VR settings and maybe overwrite the default settings for VR in the openVR_API.dll And there is also in: C:\user"username"\AppData\Local\openvr\... ... of which I think, the openvr_api.dll in the DCS directory communicates back and the openvr files form openvr directory, then communciates to the specific HMD compositor ( steamVR, Oculus, WMR, Pitool ). But please don´t take my findings for sure, as described is only some conclusion, but not knowledge. If you like, try to edit following values for the Viewport of the Pimax in Large FOV mode (!) within the stereo.lua in DCS and have a look, if the vision with Pimax in large FOV mode could be more adequate: Viewports = { Left = { x = 0; y = 0; width = screen.width * 0.5; height = screen.height; viewDx = 0; viewDy = 0; aspect = screen.aspect / 2; eye_shift = -0.032; --tans of side angles projection_bounds = { left = -2.769231, right = 1.346154, top = 1.269841, bottom = -1.269841, } }, Right = {x = screen.width * 0.5; y = 0; width = screen.width * 0.5; height = screen.height; viewDx = 0; viewDy = 0; aspect = screen.aspect / 2; eye_shift = 0.032; --tans of side angles projection_bounds = { left = -1.346154, right = 2.769231, top = 1.269841, bottom = -1.269841, I think the original values for left,right,top, bottom in the stereo.lua are fine for the usual first generation HMDs, but need to be adjusted for a more correct viewport for the large FOV. The canted display is not so much a problem, except for the VRzoom, if the tangent space for the large FOV displays and angle to the eye is more corrected. I know, what you mean that the 3D distorted image with the canted displays ( currently we only have the Pimax as reference ) does not feel right and there is always the impression of overlapping images, even without zoom. It could be visualized, when focusing contrails from another plane in the distance. When the contrails are viewed from a side angel they are visible, when you direct focus the contrails, they become invisible, because, of what I think, they are in area, while direct focusing, in which the images are overlapping, but no longer visible on the displays. This is for sure an incorrect projection of the viewports on to the panels, but I am not so sure if it depends on the canted panel design only. When looking straight into the canted display, there is no difference, beside some feeling of incorrectness in the center of the combined left and right viewport, to a planar design display HMD - the eye is looking to a selfdefined focus point and where as the image is flat, the 3D distortion is tranlated correctly to trick the brain for a 3 dimensional image with depth. It appears flat, because of the viewport correction done in the compositor. Due to development of the Pimax, the outer edges of the viewport appeared stretched, but could have been adjusted/corrected with further developement. Of what I think happens with the VRzoom is, that the brain suddenly get confused, because when zooming in, the formerly selfdefined focus point of the eye into the image now reveals a wrong angle from the eye to the screens. Difficult to explaing and only what I think happens.... Without zooming and looking straight, the brain thinks, the image is straight in front, as it should be and the 3D effect works. At this stage, we could set the focus for the eye wherever we want into the picture - the compositor comoensates by viewport correction to not get the image as streched to the end, because of the canted design. But when VRzooming, the VRzoom works with a fixed focus point at the center of the displays, from a approx 20° difference to the real focus point of the eye straight ahead. Now, when zooming, the eyes, while focusing a point a 0° recognizes the pictures zooming in from another focus point ( the center of the displays ). As we aren´t chameleons, somehow the brain overlaps both images. this could be followed, when closing one eye and only zooming in with one eye, which works fine for the brain. Also it could be followed while zooming in with canted display, the suddenly we have two differnet focus points, which are moving each to one side, from the shared focus point we had before without zooming. So, what I think, needs to be done, is, a shifting of the focus point of left and right viewport of the screen aligned with the grade of zooming to compensate the approx 20° angle of the canted design from looking to a focus point straight ahead. @remi Don´t worry, everything will be fine with the Index in DCS, only maybe the Index will have same issue with VRzoom like the Pimax, if Valve didn´t have a solving algorithm to compensate for a VRzoom. With last SteamVR update, SteamVR already prepared for the coming Index and SteamVr now recognizes different panel frequencies...maybe an adjustment for the canted design will follow within SteamVR. EDIT: Just rethought it. I think you´re completely right: the focus point of the screens for the canted displays need to be corrected in general through the viewport, to eliminate the issues with the canted display HMD.
-
Maybe it could help to run the full roomscale setup again, not only the seated setup. The inside-out tracking cameras need to see objects in the room. I think the cameras detect differences in contrast to orientate, why the tracking has problems in complete dark rooms or when looking at plain wall without furniture or something.
-
Oh yes, the nausea effect on the first time is like a punch into the stomach. This will go away and never come back, when you get used to VR.
-
I would say, running DCS directly from Pitool without SteamVR is highly recommended :) Ghosting is really reduced now to a minimum and performance much more smoother. Just took some flights - it was like graphical poetry :) But issues found so far, with the modded planes and helos ( cockpit and/or sound mods ), which won´t load, only the unmodded planes has loaded. Also a strange issue with the Harrier, which was the only module which has a massive flickering image. ... need some more investigation, before removing Steam and SteamVR completely. Edit: Flickering image with the Harrier has gone. Seems there is needed some reinstallation of the modded modules ... Also the SteamVR Webhelper is always trying to execute, when DCS started ...
-
...sounds like these new Tensor cores of the RTX cards could be activated to work for regular application?
-
Moin Twistking, you have to excuse some of dramatized phrasing before - just wanted to emphasize on the API for VR more than on the hardware. It doesn´t make sense to me constantly complaining particular VR headset or manufacturer for the different performance indiviuals get on their system. It´s like you would buy a 4k Flatscreen, put the resolution up to 4k and blaming the Monitor, cause you don´t get the same performance like on your old FullHD Flatscreen before. The Khronos Group is now more than two years old and to me it looks like simply put some company´s logos on to a sheet and spread into the internet. But as far as I know, the USB-C type/virtual link connection on the newer RTX cards, was the only effect so far from some communciation between industrie leaders, while having in mind a standardized tethered connection from VR devices to PC as well to Notebooks and Smartphones. So far no HMD manufacturer uses this connection and the moblie varinat of VR headset are in anyway developed untethered. The Khronos Group feels a bit like the OPEC is meeting to discuss how to save the environment...lol... but let´s keep cynicism aside ... When you use SteamVR, there is an option within steamVR, in the developer section, which allows you to enter the webconsole. The webconsole gives a detailed overview on how the steamvr compositor in working and which files are requested at which point in the process on running a specific headset with specific application. Quite interesting, as it seems a lot of different files correpond and gets settings from for the individual headsets. The related file in the Pimax directory is pretty poor in its information and adjustable settings, maybe there are more possibilities, when Pimax is open source to adjust the settings for DCS. Within the Pimax "default.*" file is set the maximum resoltion to 8192 pixel, which is crazy, but resetting the value to 4096 ( same as maximum render resolution in the steamvr.setting file, the slider in SteamVR get´s redefined and could eb adjusted with values more close to the native resolution of the 5k+´s displays. By this I could reached by adjusting the settings in Pitool to 1.0 and SteamVR 36% to render resolution to 2560 x 1580 , what is still not right in the vertical resolution, but should create a more clear image ( surely it could be seen different and depends on individual perception. Another file in which could be done some corrections is the "Stereo" file, within DCS directory /monitorviews. There the Viewports could be corrected to the aspect ratio of the large FOV displays. The effect is like correcting the picture on TV from a 4:3 aspect ration into 16:9 aspect ratio...quite advisable to edit this file, if using large field of view panels in DCS. So far, I couldn´t find the setting for canted displays. Even not in the OpenVr directory "setting" files ( located in /user/apps/ local/ ... ) which also correspond back settings for VR following the webconsole in SteamVR. I think the large field of view headsets are still too new and adjustments for the degree of the canted design is not yet a factor in the setting files. But need to be in future, as a large field of view only could be realized by canted or curved design of the panels. I think for Pimax it should be about 20° angle. You´re right that this degree need to be adjusted somewhere. In VRzoom with DCS it could be observed, that each eye zooms in from a viewport which is not in the 12 o´clock position of each eye, but left eye approx in the 10 o´clock position and right eye in the 2 o´clock position and the more both viewports are zoomed in, the more the 3D images are overlapping. I guess that pimax compositor does not have implemented a function/correction of the viewports, when zooming in VR... finally agree with you, that Eagle Dynamics developer might find an algorithm to compensate the overlapping images due to VRzoom, but I wouldn´t force or complaint to do so...actually be more thankful, if it could be arranged to have the VRzoom work like for planar VR Headsets with non-planar headsets. The distortion is not really magic and is only responsible for the 3D effect for the VR headset. I had these Nvidia 3D Vision glasses before at the time the DK2 form Oculus became popular to get to experience a 3D effect on 144Hz Flatscreen. With the related Nvidia software the distortion could be adjusted by a slider to improve the accuracy of the 3D effect in the way to avoid doubled lines ( not ghosting ) through the process. I think Pimax uses kind of shutter technique for the 3D effect in their headset, but it could be also switched to parallel projection, which is used by other VR headsets for the 3D effect, but on cost of more performance needed in the renderer/GPU to create the double amount of rendered images. There is also an option within a DCS graphical settings file to allow to render in stereo ( parallel projection?), but I don´t know how exactly this option affects the process, there is an effect activating this option, also don´t know, if setting the stereo render to true in the DCS praphical settings corresponds to the stereo file settings in the monitorview/stereo file in another DCS directory. It would be great to have more information noted in the files on how VR is implemented into DCS from the developer to try adjusting the settings to native resolution and specific design for individual VR headset, as we are now getting more diversification from the VR headset manufacturer. By the way, do you know VorpX? It´s a software to make non-VR games working with VR headsets. VorpX does work, but needs much performance and it comes with issues everywhere like a mod you put on top of the original programming. I think the blurry looking images, relates more to discrepancies in the render resolution and the native resolution of the panels in the VR HMD, but also because the lenses in the HMD also work like magnifying glasses between the image on the displays and the eyes. Poor lenses result in a sweetspot effect, blurry image and visible SDE. Still curious if Valve could have solved or better solved these issues with their new Index HMD and lens technique as well as XTAL might have improved the effects with much more better lens design and technique. If so it could be a huge step into better image quality for VR HMDs - once these lens techniques are available in public, it could be backengineered by all manufacturer for more improved VR HMDs in future. At the moment, I find it very interesting, that Sweviver runs his Pimax without SteamVr, will try to follow this and see next, if the 5k+ could be improved for DCS by having more options due to Pimax changing their render pipeline to open source.
-

Worse VR perfomrnace since recent SteamVR and Win10 Updates?
Rosebud47 replied to Nealius's topic in Virtual Reality
Had nearly the same issue recently on the Normandy map. In the first moments in the air terrible performance and visuals, after 20 -30sec. it suddenly turns to usual performance and visuals. Maybe VRAM issue when loading up the scenery... ? -
DCS Steam version is not needed to run the Reverb. But as you wrote, Steam needs to run in the background. Also HP Reverb is a windows mixed reality HMD, so you need the "Windows Mixed Reality for SteamVR" App to run. The App could be downloaded for free from Steam.
-
What smell would we need for DCS? Check this out
Rosebud47 replied to DutchCoolHand's topic in Virtual Reality
Fart Edit: not own ones, so for the F-14 especially ... I mean, have you ever been flown with low fare airlines? -
In advanced, I have to disappoint twice: first, I don´t know better about how the VR pipeline works, than anyone else and secondly, of the three and a half languages I speak, english is only my second best, so please apologize, that I can´t express myself, like a native or colloquial english speaker ... anyway, I try best, to have a nice chat. Mentioning the "interface" or compositor or SDK or API or driver for VR is key for the situation with VR we are facing at the moment. The headsets themselves are pretty much the same: one or two cheap smartphone displays, two cheap fresnel lenses and tracking system all hold together by some plastic ... but the effect of experiencing VR is astonishing! The stage of VR development or let´s the the stage in the evolution of the HMD technique is pretty much in the beginning. Regarding the different APIs it is comparable to the situation in some old days, in which VHS, BetaMax and Video2000 were competitors in the market for videotape devices. Each one standard was brought up by different companies to compete in the market for the first place and biggest piece of cake of the market. Finally VHS made it as the one standard. When bluray disc started as successor for the DVD, there was also HDDVD as a competitor to bluray, but vanished quickly, so bluray became the standard format. With VR it´s virtualy the same and the reason, why we have such a mess with the VR API. We have Oculus, SteamVr and WMR competing in the market driven by individual companies to get the biggest piece of cake in the market. But as with every standard in consumer electronics in the past, there will be one standard at a time and the others will vanish. The current situation is not only bad for the consumer, but as well for the software developer. Just imagine, and following comparison is very close to VR headsets, we would have three different standard for Flatscreen monitors to work with different software applications ... it would be a mess, wouldn´t it? The Nvidia VRworks is great, but as far as I know not to easy to implement, but with lot of support by Nvidia. Implementing VRWorks clearly woudl have advantages, but makes the developer also depending on Nvidia. AMD cards user would loose any support at the same time, if not as well the AMD equivalent to VRWorks would be implemented into the application. For Nvidia VrWorks is more or less a software to promote and sell more Nvidia cards. I think AMDs equivalent is named "crystal-something" . Both SDK would support VR-SLI, which promises a massive boost in performance for VR, beside the SMP and MVR, which are greatly improving performance and quality in VR ( take a look at the Nvidias "clown house" demo or "EVE Valkyrie" which had implemented some of the VRWorks features and run much better than any other VR application. VR hardware on lacks of two issues at the moment: SDE and limited FOV. But with regard to both, there is good progress at hand to be optimistic for the future developement of VR hardware.
-
Wouldn´t say, that properly making work the new and/or canted HMDs belongs to the work of DCS developers, but to work oft he developers of particular HMD types and techniques. DCS developer shouldn´t care about specific HMDs techniques, but improving the DCS engine for VR in general and that´s exactly, what they do and it´s devinitely the best support for VR we could get from DCS developer. To engineer the canted HMDs working well with DCS should be done by programming the compositor in a right way. At this point I am very much confident, that the Valve engineers have done it. The Pimax software engineers seems to have problems to do this. Meanwhile, I would say, that the Pimax could run much better in every aspect with more properly engineered interface/compositor to interact with the applications. Pimax vision is to have their product working with all(!) VR applications, which makes the software developement for the Pimax compositor more difficult, than to make the HMD work with selected applications. It´s a very good effort, Pimax is following, so the Pimax supports Oculus exclusive games as well as SteamVR games right away, whereas with a HTC Vive or WMR HMDs the Oculus exclusive games, could only be support with a hack. Now, with Pimax going open source, there might be the chance, that the 8k/5k+ could be connected directly and better through SteamVR, without PiTool,... maybe, if the Valve engineers implement fully support into SteamVR for the Pimax headsets. This would give some advantages in better and more advanced engineered algorithm, than the Pimax engineers could do, which was always a lack of Pimax... but let´s see about this, it´s currently more wishing, than expecting it to be that way. I´m pretty sure that the Valve engineers programmed and tested the Index to work perfectly with DCS. Another point for having the Pimax fully implemented into SteamVR could be, that the Index shares the canted design and the adjustable panel frequencies with the Pimax. In opposite to that, I still wonder, that someone in the forum mentioned, that the VR zoom worked well for the Pimax before and now doesn´t work, but not sure if it is broken through a DCS update or an update of the Pitool version. There are also ways to adjust the Pimax compositor settings by hexediting the pi_server.exe, but this is real try and error and as much fiddling you could imagine. For me, I´ll wait now for the DCS spring update, which can´t be so far away from now, which should give more improvements for VR. Also for the moment I more enjoying, than fiddling around, to fly one of my first love in DCS, which is the F5E-Tiger, which gives also much better performance in VR than the F-14B. Let´s see how things go... give it some time. Eagle Dynamics developer truly make DCS the best it could be to run in VR. No need to blame in that direction. Making a specific VR headset to work properly with DCS belongs to the engineers of the headset from my point of view.
-
Great Video! Really spectacular camera angles and cuts. In regular, I don´t watch these videos too long or in full length, but yours is thrilling as a movie. ... the more I fly the warbirds, the more I love the raw power and man-to-man combat.
-
I like very much Pimax company´s philosophy... it´s quite the opposite of using VR as a cash cow in a billion dollar market. Anyhow ... not sure if going open source will bring real advantage for DCS with Pimax, but it´s for sure the right signal, like VR should be developed as an open standard.
-
What smell would we need for DCS? Check this out
Rosebud47 replied to DutchCoolHand's topic in Virtual Reality
Hot sweaty pilot? Smelly tree and vomit? Don´t need a indiegogo project for that. -
Buenas, for a comparison in practice, I think we have to wait until the Rift S is delivered. Theoretically, with regard to display resolution, I would say, the higher the display resolution, the better clarity and less SDE.
-
LOL ...Now it´s hard to get back on topic. :)
-
It sounds that the problem is not with the HP headset, as you mentioned it works fine, but the screens don´t wake up after going into sleep mode. First guess is still to look into windows power settings. Maybe the power supply is too low, which might be the case even if it´s around 750Watt - the RTX card sucks a lot of power from the system. Do you know this new Windows Ultimate power setting? Maybe activating it, could help... hope you get it solved.
-
If everything else, including Windows 10 is up to date, the only advice I could give, is: try another USB connection for the headset. Edit: if any other USB connection ( 2.0, 3.0, 3.1 ) doesn´t do any better, try to set the USB HUBs in windows device manager not to be controlled by windows power saving options.
-
So far the problem with this patent technology is, to convince the people to mill into their cranium to plug in the brainwave amplifier.
-
Doesn´t it wake up automatically, when you start a VR application? If not, then there´s something wrong. Do you have "WindowsMixedReality for SteamVR" installed or "SteamVR" only? Is there a sensor inside between the lenses of the HP HMD? WMR in windows should start, when you put the headset on or simply cover the sensor with a finger ... Did it ever start? Is the HMD and VR new to you? You should describe your problem a little more ...
-
Since using wide FOV VR headset, looking behind feels totally natural. :music_whistling::)