RvETito
-
Posts
2541 -
Joined
-
Last visited
-
Days Won
7
Content Type
Profiles
Forums
Events
Everything posted by RvETito
-
No problem, I'll let you know my bank account :D
-
Ну знаешь, может быт намного хуже- полет над водой, в горах где ровную площадку нету, можешь в минное поле садится... :D Инструкция всего лишь о принципах, всегда есть исключения.
-
Look above, on the cockpit ceiling but it's not modelled. Seems like you're suffering engine flameout due to intake icing. When EKRAN warns you for icing turn on both rotor and engines ice protection.
-
Нет, при отказе любая из гидросистем выпадать в панику не надо- давление так быстро не падает, там еще и гидроаккумулятор есть. Инструкция всех вертолетов говорить одно и самое- при отказе любой системы немедленно выбрать площадку и посадить вертолет.
-
Externals show true airspeed.
-
Yes, you're checking both the sensors (termocouples) and their wiring. If a sensor or it's wire has poor conductivity, the group it belongs to will not pass the test and it's light will not illuminate. You need to inspect all the 3 sensors in that group, regardless to which compartment it belongs.
-
There is no 3rd group of sensors in the APU compartment. Not a bug, it's a feature.
-
Hehe, the 1 million $ question. I'm usually getting paid when I'm explaining this but this time around you get a Christmas discount :D On the engine fuel control unit (FCU) there is a throttle lever controlled both from the yellow lever in pit and the collective. At IDLE this lever is at 0, the maximum postition is 120. When you move the yellow lever from IDLE to AUTO the lever on the FCU moves from 0 to 48 and in normal operation you don't move it from there in flight. With the collective you move it from 48 to 120, you have 72 degrees range with the collective. When the yellow lever is at IDLE and you pull the collective full up you will move the FCU throttle lever from 0 to 72. The gas-generator RPM governor at IDLE maintains ~72%. When you start moving the FCU lever up (either with the yellow lever or collective) the RPM settings of the GG governor start to increase in linear function and at 70 degrees the GG governor settings reach the maximum settings, usualy a little more than 101%, slightly above the EEG (electronic) limiting threshold. That means that you can have maximum engine power available by pulling the collective only but this most likely won't be enough to maintain rotor RPM 90%.
-
Care to know what the yellow stripped light and sound warning means? Also, how was the picture of the Shkval at 77%? ;) The bottom line is that this is possible IRL but it is nonsense, it's like trying to hit top speed with your car at 3rd gear.
-
Good thing he posted a screenshot, otherwise I would be still wondering what "exost fins" are supposed to be :confused:...
-
How is the rotor behaving? ;)
-
Yep, that's what this engine is all about- if you understand when each of the governors (gas-generator RPM governor, power turbine RPM governor, electronic engine RPM and EGT governors) controls the fuel flow in the entire range of the fuel control unit throttle lever (from 0 to 120), the rest are just details.
-
Если кто-то думает что какое либо управление тяжелого вертолета возможно без работающих гидроусилителей- лучше подумать еще раз. Перемещение при холодном вертолете возможно, но в инструкции запрещается изза вероятности дефектов по рулевым приводам. Сам пробовал не один раз на Ка-32, особенно РОШ при регулировках двигателей на площадке, приходится оба руками тянуть. Представляю себе если это было в полете и добавлим шарнирные моменты лопастей...
-
Also, the fuel control unit is not set to maintain 90% rotor RPM with throttle lever at IDLE. Because the engine fuel flow control is slaved to the collective, the GG RPM follows it but it's metering the fuel flow proportional to collective (respectively throttle lever on the engine control unit) position, not to rotor RPM.
-
http://forums.eagle.ru/showthread.php?t=35524
-

TOW the most feared low altitude air defense?
RvETito replied to mjolner's topic in DCS: Ka-50 Black Shark
Nice post, Brad. Hopefully we'll see ground units (especially air-defences) cooperation in a patch or other DCS module. -
No limitations on pedal input for such reasons, only for highspeed forward flight as a blades intersection precaution. The static adjustment of the rotormast (flight controls rigging) is such that the differential pitch should not change the overal rotor lift, only to distribute it between the two rotors. Even at maximum collective the pilot can apply maximum pedal (either).
-
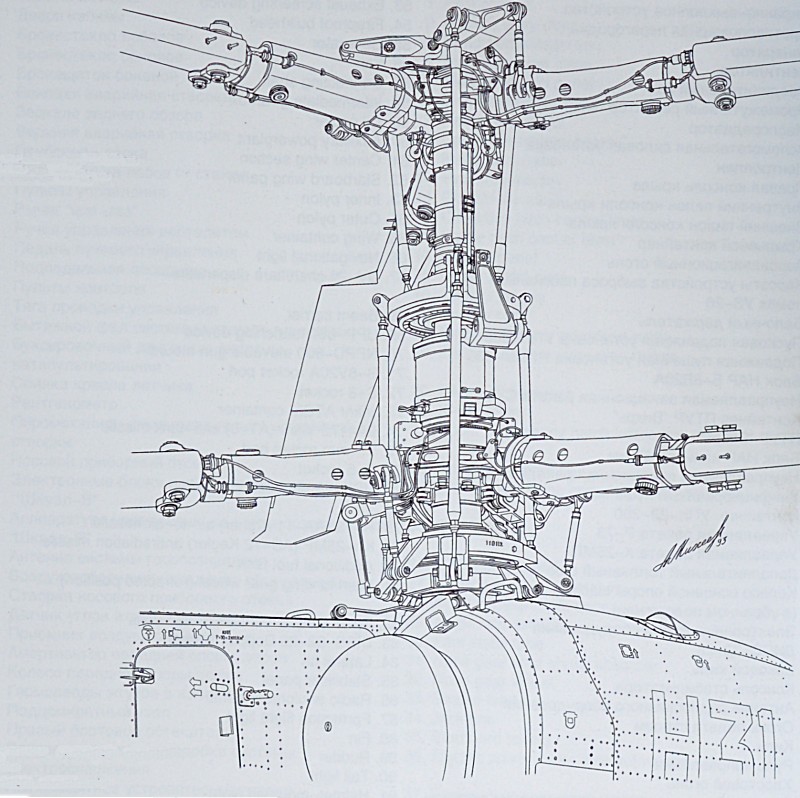
My mistake here, the good old Ka-32 legacy :) The two swashplates indeed slide up and down but only together, as you noticed the rods connecting them. They form the lower slider. The upper slider is on the top of the rotormast and is moving up-down by push rods inside the inner driveshaft. So for differential control the two swashplates move in one direction while the upper slider moves in the other. Note that the lower rotor blades pitch can be changed only from the swashplate (one link) while there are two on the upper rotor- one from the upper swashplate and one from the arm connected to the pushing rod, coaxial to the driveshaft. Look at this pic:

-
Incorrect, the swashplates are fixed for the rotormast, they don't move up and down, only tilt. Those are the two sliders that move up-down together (collective) or differentialy (pedal). Hang on, I'll look for a pic to show u.
-
TOW the most feared low altitude air defense?
RvETito replied to mjolner's topic in DCS: Ka-50 Black Shark
Just don't hover in the battle area unless you're sure about your safety. That's a common mistake I see online- people hit autohover and start shooting at things. No easier way to get all kind of surprises in your face. As for TOW or any other land-guided ATGM- just beam or change altitude. They're cable guided by an operator but they're not maneuvarable at all. I haven't been hit by ATGM yet, though I've eate some 120mm rounds. -
Negative, by pressing the trim button you release the brakes holding the srpings in cyclic (pitch&bank) and pedals (yaw). Either all or nothing, by design.
-
Correct. I only gave example of how you can judge for the yaw velocity with released controls after trimming. I don't have pedals neither, I use the X52 twist instead that's why I always need to trim in yaw because my hand get tired. Yes, this is how I flew it- no payload and 50% fuel. I never use FD including in this track but without Yaw damping and stabilization you'll find yourself in a little adventure ;) Pitch, bank and yaw channel must always be on.
-
It does. Ka-50 is a big helicopter with big inertial momentum around it's vertical axis. It takes time till it accelerates to the maximum yaw angular velocity which is more than 90 deg/sec. Try deflecting full pedal at hover and trim- in 3-4 sec it will spin like mad. Note that it will also reduce the yaw angular velocity with the same delay, even if you apply full opposite pedal. It's all about inertia. Check the Airshow Min Vody track in the demo folder, it is me who flies there ;) About at the end of the demo I bring it to hover in front of the apron, then full right pedal and collective up to the EEG limit. The yaw angular velocity increased smoothly on the climb till it reaches constant >90 deg/sec.
-
OMG, I was hoping the last minute checks, preparations and tons of paper work that I was overloaded in my real job everytime the helicopters were going on a mission will remain there. Now I see that curse is following them even in the virtual reality... It ain't easy to work on helicopters, both for real and virtual :D
-
:doh: I had another impression from our correspondence :) Check PM, Dmitriy.