danvac
-
Posts
335 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Everything posted by danvac
-
Yeah, that's how I set pagefile size. Have you tried smashing F2 in some mission where is more units?
-
I have set 8GB on drive C and 16 GB on drive D. Can it be that way? EDIT1: Crashed too without dump...trying to set 16 GB on drive C. EDIT2: Crashed without dump with 16GB swap on drive C. EDIT3: Increased page file to 25000 MB on drive C. Crashed again without dump. EDIT4: I have found some dmp under %LOCALAPPDATA%\CrashDumps, uploading to dropbox now. EDIT5: https://www.dropbox.com/sh/6hs2dzkfm2n6mv2/AAAyrS_VY1cpbOamLqZ502I1a?dl=0 dcs.log.zip
-
Steps to reproduce: 1. dcs_updater cleanup 2. dcs_updater repair 3. delete DCS folder in Saved Games 4. start game 5. select Instant Action->F5E->Persian Gulf->Intercept 6. start pressing F2 until crash to desktop DxDiag.txt DCS.zip dcs.log.zip
-
You can also buy NS430 for L39. https://www.digitalcombatsimulator.com/en/shop/bundles/ns430_and_ns430_l39_bundle/
-

[RESOLVED]Cockpit ilumination changes when NS430 popup is visible
danvac replied to danvac's topic in Bugs and Problems
I had same issue today in PG map. https://imgur.com/a/bgosRie -
http://cdn.akamai.steamstatic.com/steam/apps/306240/manuals/DCS_F-86F_Flight_Manual_EN.pdf
-
They are currently updating cockpits for WW2 planes, so I think that have just higher priority.
-
NS430 is not available on instructor seat in multiplayer. It would be nice to have.
-
DCS last Update: Big problem !!!
danvac replied to FistofZen's topic in Controller & Assignment Bugs
I can imagine that hotfix seems to be more complicated than expected. @nessuno0505 I would go for just setting module you want to fly and let others as they are. -
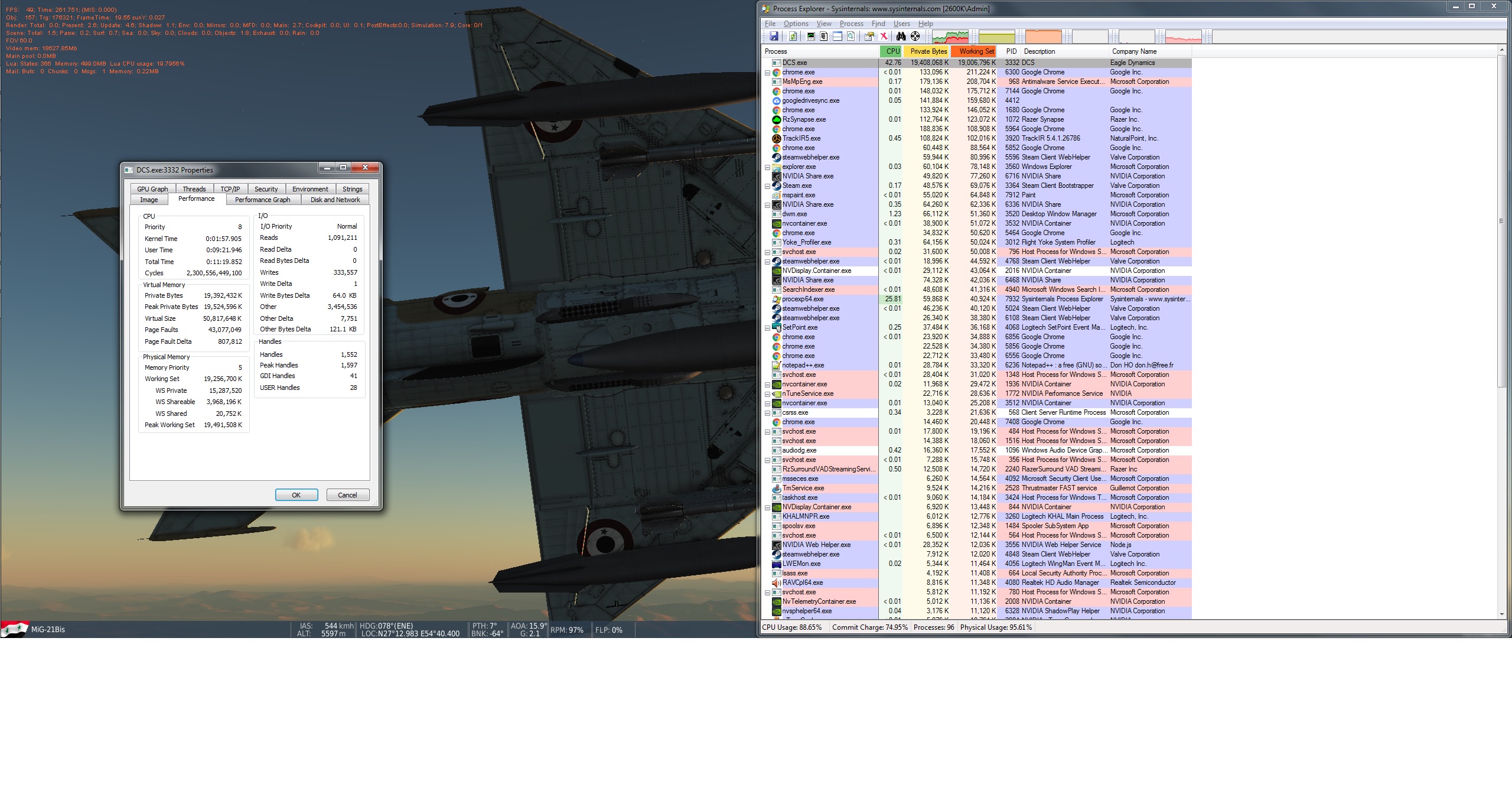
My DCS is able to use up to 24 GB physical memory. I can provide memory dump from procexp64 and mission if needed. DxDiag.txt

-
DCS last Update: Big problem !!!
danvac replied to FistofZen's topic in Controller & Assignment Bugs
@NineLine: Can anyone provide list which modules can be affected with this bug and which will be most probably affected in near future? -
I have two top down monitors setup and this issue disappered for me after some recent update. It was gone 17th Sep.
-
Long Initial point names are not shortened and are shown inside BRG and DIS information on NEAREST INTERSECTION page. See screenshot: https://imgur.com/a/3KCr5NG Steps to reproduce: Place intial point on map named "FORT LONGNAME" Check that point in NS430 on Nearest Intersection Page.
-
[RESOLVED]Cockpit ilumination changes when NS430 popup is visible
danvac replied to danvac's topic in Bugs and Problems
Thanks for confirmation it is reported. -
Cockpit ilumination changes when NS430 popup is displayed. I noticed this in L-39C and F-5E.
-
Still present in DCS 2.5.2.19641 Open Beta Update 7.
-
Hi, there are many messages not translated to English. Could you please fix that? You can easily check for example by looking into file dictionary in L-39 Kursant 01a.miz\l10n\DEFAULT\ Regards, danvac
-
Spawned facing wrong way in hanger
danvac replied to DocHoliday14's topic in Release Version Bugs and Problems (Read only)
I have similar issue in 2.5.1 OpenBeta. I have placed Spitfire (Client) on Mina Airport - Nevada - takeoff from runaway. It got spawned facing correctly when played in single player. But oposite direction in MP so I have to turn 180 degrees before takeoff. -
What exactly is meant by chaning BIOS? Updating BIOS to newer version or just changing some values (voltages, frequencies...)? It is connecting another hard drive considered as changing hardware?
-
Tested this weekend. Works perfectly. Thanks for your work.
-
It does not make sense. I know that I have sun on right side and when I look at instrumets I see shadow from left...can you make master switch off for shadows? Also this line is not correct: https://github.com/H-J-P/Ikarus_Source/blob/436993743e3241a4edf7256f3a079d8640c3c11b/Ikarus/Ikarus/Gauges/F5E/F5E-ASI-2.xaml.cs#L143 It should be: rtASIMach.Angle = (- rtMach.Angle) + rtASI.Angle; and I am still not sure if it is fixed correctly. I see it misbehave, but I did not checked if I was running correct version at that time. https://github.com/danvac/Ikarus_Source/blob/76299deb07859895ec7a3ae42eab82c9a653d4c9/Ikarus/Ikarus/Gauges/F5E/F5E-ASI-2.xaml.cs#L154
-
I did not put that change into updated class. I do not know how do you want to handle it.
-
I mean shadow in F5E-ASI-2 gauge: https://github.com/H-J-P/Ikarus_Source/blob/a3ffa94bf1939cf8e13f439fe40d0fb43e861dae/Ikarus/Ikarus/Gauges/F5E/F5E-ASI-2.xaml#L218
-
F-5E Pitch Trim Indicator Can you add gauge for Pitch Trim Indicator? Due to position in cockpit above ADI it is hardly visible. (screenshot attached) -- Pitch Trim Indicator Pitch_Trim = CreateGauge() Pitch_Trim.arg_number = 52 Pitch_Trim.input = {-10.0, 0.0, 1.0} Pitch_Trim.output = {1.0, 0.0, -0.1} Pitch_Trim.controller = controllers.PitchTrim
-
This is correct commit to calculate mach meter angle: https://github.com/danvac/Ikarus_Source/commit/76299deb07859895ec7a3ae42eab82c9a653d4c9 Input/Output values are bases on latest mainpanel_init.lua MachIndicator = CreateGauge() MachIndicator.arg_number = 179 MachIndicator.input = {0.5, 0.6, 0.7, 0.8, 0.9, 1.0, 1.1, 1.2, 1.3, 1.4, 1.5, 1.6, 1.7, 2.2} MachIndicator.output = {1.0, 0.929, 0.871, 0.816, 0.765, 0.727, 0.683, 0.643, 0.611, 0.582, 0.551, 0.525, 0.5, 0.4} MachIndicator.controller = controllers.MachIndicator