Amarok_73
-
Posts
783 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Amarok_73
-
Unfortunately, most of my live CP/Gs are lazy bastards, so if I want to have anything done well, I have to do it myself.
-
For me it's beyond of the dreams taking hands off the HOTAS and eyes off the IHADSS reference bullets to do something more complex using avionics, such as typing in a new way point with the keyboard unit. To do something like that I have first to put the heli into more or less stable flight, then try to do it as quick as I can hoping that heli will not ditch in meantime.
-
I've just tested my joystick with DIView and with forces set to usual settings, the acceptable size of "area" covered by SCAS would be around 8% per side of X and Y axis, while if forces are set to maximum values, this area narrows down to about 4-5% per side, but at this forces setting the operating with the joystick becomes quite exhausting, while the wear of mechanism that it is based on plastic gears, not drive belts probably increases significantly. So with current limits fixed on 2.5%, for me holding the Apache in hover means constant work on the joystick and observation of the controls indicator instead of situation around us and help with spotting the targets for my CP/G.
-
Hey @Raptor9, I would like to politely ask if the minority using FFBs and lower priced joysticks and struggling with the problem of playing too much around center of force interaction can count on the devs to look kindly at this problem and try to solve it by providing an option to reduce SCAS sensitivity to joystick movements in around the middle of the trim? Many friends who have this module complain that these 2.5%, especially with such short joysticks, which we fly, is too small a margin to be considered sufficient for comfortable piloting of Apache and, consequently, consider that this topic can be closed . The second problem that FFB users still face is that with such joysticks you can't apply curvature or dead zone to any axes as the forces are still linear so it also raises the question if this issue is still on the developer list whether or not they don't bother with it?
-
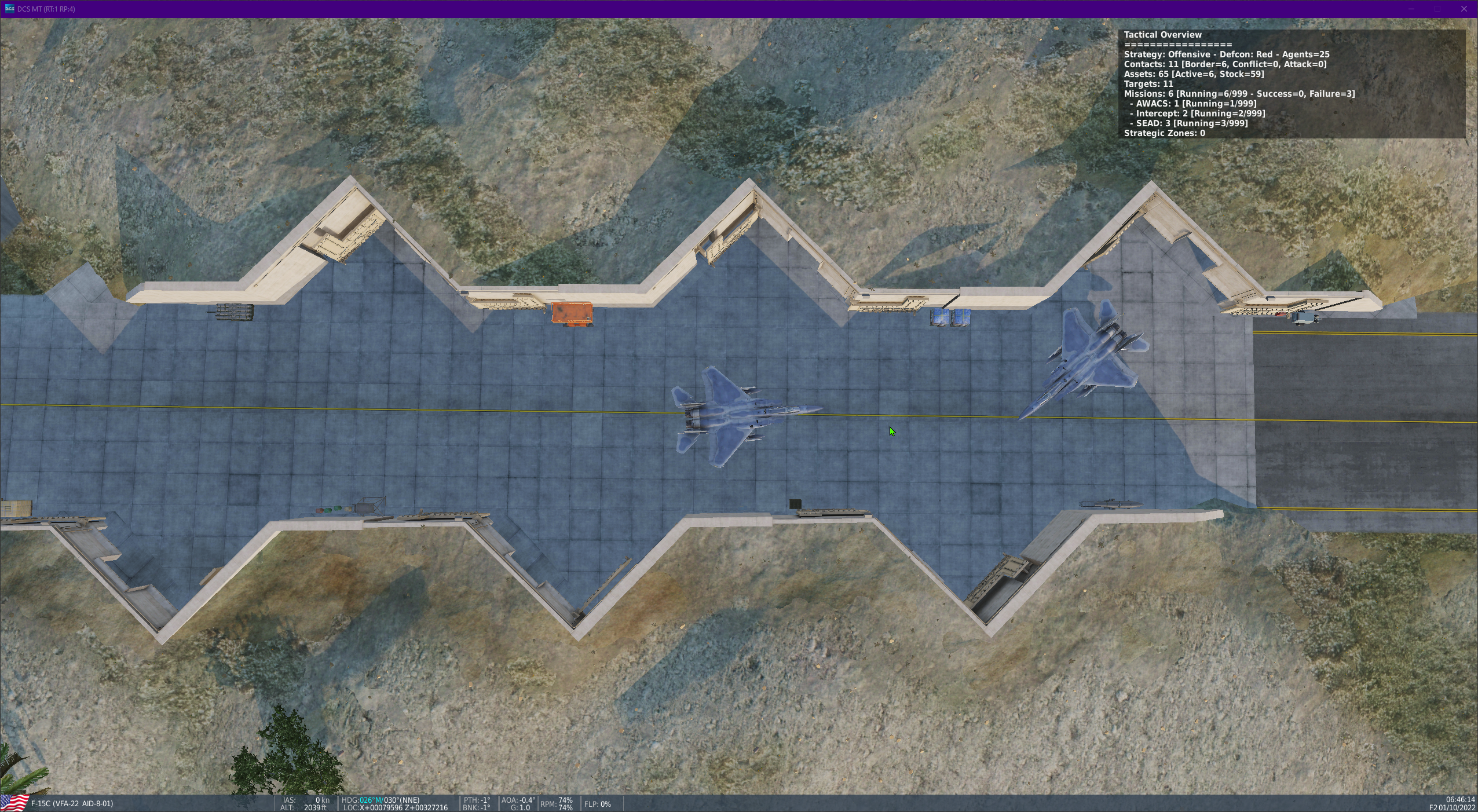
Hello, I'd like to report, that there seems to be the problem with AI's taxi routes. The plane pointed on the screenshot seems to be blocked by other planes, awaiting for him to depart. null

-

Dedicated server repeating CTD without any apparent reason.
Amarok_73 replied to Amarok_73's topic in Game Crash
Well, this tanker departs from the Cairo East base, which seems to be big enough for him, and is of the same coalition as the plane, so this isn't the factor. Besides, this time the server was about the one hour plus awake then crashed, but this mission sometimes can last for like 6-16 hours without any disturbances. I've disabled for the AI planes the possibility to refuel from the tanker, and I'll see what will be the effect. On side note, have anybody else noticed, that planes in the queue to the tanker are overlapping each other without colliding? I wonder if that is supposed to be that way... -
Dedicated server repeating CTD without any apparent reason.
Amarok_73 replied to Amarok_73's topic in Game Crash
@FusRoPotato Unfortunately there's no track I could review to check this theory, but it sounds reasonable. -
Hello, Is there anybody that can tell, what may be the reason of such CTDs on dedicated server? Looking into the log file, I can't see in the crash description itself, anything that would lead to any specific reason, only the multiple repeating messages about IL-76 hit by Mig-31 and vice versa preceding the crash message itself makes it look quite suspicious. dcs.log-20230818-204616.zip
-
@Picure I will take this opportunity to emphasize what has already been said in another thread, but apparently it did not make any impression on the people responsible for the development of this module: In the case of the Logitech G940, due to the specificity of its construction and the resulting play of the joystick in the vicinity of the center , the limits set by the developers are definitely too small and unrealistic to maintain. Therefore, I still have the illusion that developers are considering the possibility of parameterizing these limits using special options.
-
-
This happens with AI planes, so I forced them in the script to use the open air stands, so no big deal so far.
-
null
-
I given it a shot, but the only effect was the error message saying that the "info" field from the last line (second call of env.info in the script) is of the 'nil' value, meaning that the context indeed has changed, but the night mission was not loaded. env.info("#### Loading...") mn = "d:\\DCS World User\\Missions\\304\\15e_tren_night.miz" -- mission name, including all escapes exec = 'mn = "' .. mn .. '"' exec = exec .. "; success = net.load_mission(mn); return success" env = "gui" trigger.action.outText(exec, 30) -- show what we got local res = net.dostring_in(env, exec) env.info("#### Not loaded.")
-
Changed the string to single backslashes, and received the following error: No worries @cfrag, there's no big deal about it. Do not feel any obligation to waste the time on this investigation.
-
So if I'll assign to the "mn" variable the path with file name to other mission file, this mission will be loaded? EDIT: It doesn't seems to work as I assumed. No any action on this line, and no error in log file: local res = net.dostring_in("gui", "mn = 'd:\\DCS World User\\Missions\\304\\15e_tren_night.miz'; success = net.load_mission(mn); return success")
-
@cfrag I think it's clear now to me, but the example from You will be as always highly welcome.
-
Could you expand the thought? I am struggling with the loading MIZ with this function, but so far I am receiving error, regardless if I use it from MOOSE, or directly from API.
-
Installed today drivers version 23.7.1 and whole quite long session on MT passed without CTD. It left me carefully euphoric.
-
Does anybody else have been in the situation when change of airport coalition was not recognized by the planes? I have such issue on Syria, where I have changed side of Palmyra from blue to red, but red planes have "no available" for any ammunition, while if I'll add the blue plane to the same airport, it has full selection as well, as the control tower speaks with him. I've checked the mission file from the miz package, and airport number 28 is visible there as "RED". EDIT: Sorry, my bad, I've left the TACAN unit that was belonging to the blue coalition and was set as hidden.
-
It seems the situation is back under control.
-
No worries Flappie, I don't think anybody assumes that.
-
@Flappie I did as You told, check the date and time settings, they're correct, so here's the log from one of the serversdcs.log
-
@Wags@Flappie @BIGNEWYGentlemen, is it anything You can confirm that is on the ED side?
-
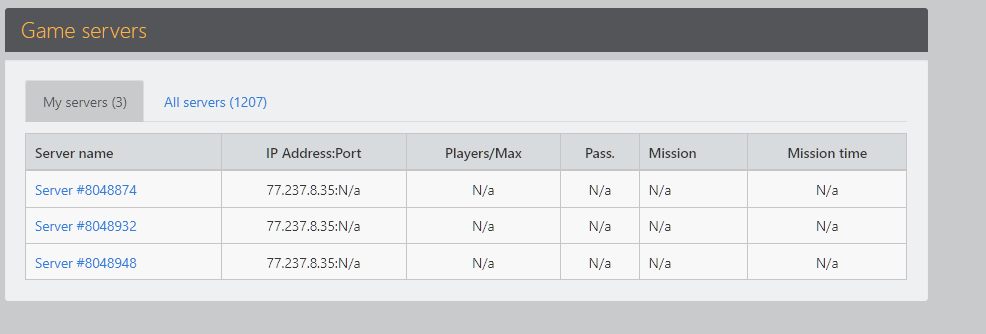
Hello, We have problem with our dedicated servers. They starting but do not appear in the server browser. The server list in the WebGUI on the DCS web page looks as on the attached screen, and the number in the server name periodically changes. Looking into the log file I can see, there is the three messages that appears continuously: "2023-07-02 07:27:55.603 INFO ASYNCNET (Main): Registering HTTP control interface as 77.237.8.35:8089 (port is forwarded by UPNP) 2023-07-02 07:27:55.603 INFO ASYNCNET (Main): Registering server as 77.237.8.35:10309 (port is assumed to be open) 2023-07-02 07:27:56.195 ERROR ASYNCNET (Main): Server registration temporarily failed with code 500. Will try again later." The port numbers are ok, specific for each of the servers. Local Web GUI works ok, and shows propper servers configuration and it is possible to connect to the servers providing the IP and port. What can be the reason of this issue?
-
Since MOOSE is developing rapidly and I have the impression that I am not keeping up with its development, I would like to ask, in the case of preparing a new mission that is to simulate a large-scale conflict between the parties remaining in it, which functionalities should I consider in order to optimally use the possibilities of this Framework. I know for sure that it should be Ops.Chief for general CAP and GCI support, Functional.RAT to introduce an element of uncertainty, or Ops.NavyGroup for handling fleet activities. What about simulating the fight for the disputed areas, acquiring and re-acquiring them with the use of armored forces and supporting these troops with the help of CAS or BAI missions, possibly with the support of JTAC. To be clear, I'm familiar with scripting missions in DCS and have already done a few, but for a new mission I'd like to avoid scripting general phenomena at a detailed level as much as possible. I want to achieve the effect of "total war" in the style of a BMS campaign, but of course on a smaller scale, compatible with the capabilities of the DCS game engine. My request/question stems from the awareness that some of the functionalities that I have used in the missions created so far have in the meantime been extended to other functionalities in the MOOSE framework and I would like to avoid using outdated solutions as much as possible.