FragBum
-
Posts
2426 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by FragBum
-
I was flying the Mi-8 the other day and kept thinking of this thread and started to think about it, and it something I had just taken for granted. This would have serious implications for the flight dynamics of the Mi-8 Also is this just a like where the indicator points relative to collective or is it more serious under the bonnet of Mi8 and DCS stuff? Are there implications for the other helicopters in DCS?
-
Check that force feedback is not enabled on the Gazelle.
-
Why is it So hard to land the MI 8
FragBum replied to tusler's topic in DCS: Mi-8MTV2 Magnificent Eight
Alas most if not all VRS appears to be settling with power AKA too fast a descent as opposed to actual VRS,.. ;) -
new uh-1 collective proyect
FragBum replied to solrakbargol's topic in PC Hardware and Related Software
No stiction at least after putting the cyclic through a couple of figure eight patterns at start up and yes it is pure centerless no springs just the dampers. I did have to shim out the gimbal to remove as much play as possible. But you probably worked that out from my quip. :thumbup: -
Why is it So hard to land the MI 8
FragBum replied to tusler's topic in DCS: Mi-8MTV2 Magnificent Eight
If I may, I'll add don't worry about oil platforms, stick to runways or just plain ole open fields for starters. Setup a lightly loaded Mi8 say 30% fuel hot so it's already started. That video I linked is not instructional but it should illustrate what I am saying below all inputs are measured and anticipated in other words I am correcting for where I want to be some seconds ahead. You shouldn't be robotic with the controls or at least that is how you describe your inputs. As you loose speed and get less lift from translational lift you need to anticipate 2 basic things you will need to increase collective don't wait till VSI indicates your sinking and it should be a gradual increase to maintain your desired sink rate. At the same time because you are increasing rotor load you need to anticipate anti-torque correction. Again gradually and just enough to maintain the aircraft in the correct attitude. All this and cyclic input to correct roll and pitch, because all inputs interact to an extent. And all at the same time. Try not to think I have done this now I need to do that, more I am doing this so I also need to do that. :D Normally on approach there are land land marks that are picked for when turn into final and when to start to slow down to descent speed then normally a constant descent speed and sink rate about 3mtr/sec (~500ft /min). Set up for some straight practice runs approach from say 300mtrs get a feel for how far out you need to be to hit the piano keys on the runway. That should give you about 1 min 40 + and try at about 150 klm/h IAS. Another exercise same loadout from hover climb vertical to about 20 mtrs then control vertical descent at about 2mtr or less /sec you should settle at about 2 to 3 mtrs or so IGE. -
new uh-1 collective proyect
FragBum replied to solrakbargol's topic in PC Hardware and Related Software
Mostly depends on mechanical advantage and how you a) pivot it and b) where you apply the damper. here is some background -
Why is it So hard to land the MI 8
FragBum replied to tusler's topic in DCS: Mi-8MTV2 Magnificent Eight
Maybe I'll just say there is no substitute for even close approximations of real controls. ;) <edit> I might add here, this is where sometimes the use of "curves" might make a limited control work better in DCS. -
Why is it So hard to land the MI 8
FragBum replied to tusler's topic in DCS: Mi-8MTV2 Magnificent Eight
Don't know really. Maybe, but if your near MTOW there isn't a lot of power reserve and really need to keep VS rate in check. Way too easy to draw down rotor RPM and fall if you let sink rate get away. For me I like to keep VS below 3 usually 2mtr/sec so maybe 30 to 40 secs seems to work for me for long drops. -
Why is it So hard to land the MI 8
FragBum replied to tusler's topic in DCS: Mi-8MTV2 Magnificent Eight
And I have found that to be the case with DCS Mi-8 as well. My question, what are you using for controls? -
Why is it So hard to land the MI 8
FragBum replied to tusler's topic in DCS: Mi-8MTV2 Magnificent Eight
And promptly popped the tyres and landing gear and generally had a bad day at the office, you may get away with maybe 0.5 mtr/sec but that is still a hard landing. IMPO. If you mean under 40kph and 4mtr/sec you are loosing any benefit of translational Lift and so need more collective to reduce sink rate and if you do not have enough power you will continue to sink. Keep the VSI rate in check :helpsmilie: -
new uh-1 collective proyect
FragBum replied to solrakbargol's topic in PC Hardware and Related Software
I use a similar arrangement with an adjustable oil damper aka motorcycle steering damper and there really isn't any difference in feel for collective up or collective down and it stays where you set it. If your collective is light weight you wont need any thing else it will be fine. @solrakbargol nice job,.. :thumbup: -
I doubt it's actually VRS, different kettle of fish so to say, if you allow vertical descent to exceed available power, it's just bad piloting, look at your charts. Oh and it's translational lift. :) And it's not "soon" you need to preempt it, well everything, don't fly in the now fly in the future.
-
I know this is a little old but what control devices are you using? The Mi-8 is really stable in pick up, hover flight and set down, and I can't say I have experienced VRS. (always fly with wind) Have I fallen out of the sky, yes on numerous times. :D The causes for me anyway. Letting descent VS get away from me. Manoeuvring into the same direction of the wind and suddenly loosing translational lift with out (pre)correcting for it. Kinda like above not preempting for lose of TL on approach. There are others but they have nothing to do with sensible flight. :music_whistling: I could well be wrong but actual blade attack angle would vary according to weight and wind and air density. ?? Happy to learn more anyone. ;) I suspect the blade angle might be a guide to (TOW) weight sort of like Huey transmission pressure?? And if your nervous wait till we get multi crew and I'll take you for a loop or 2,.. :P
-
@AlphaOneSix I for one appreciate your posts and do not consider them to be a waste of time.
-
No one said it was perfect with some skill you'll get it, you don't need to put the heli in R for race and plant the boot a gentle approach is best. Besides get creative dink the tail rotor on a tall building, landing on those cranes in NTTR or on top of those tall buildings there is always something to try. :P:thumbup:
-
Hi K-51, looking good bro. I'm just going to say if it works half as well as my build (and I expect it will or even be better :thumbup:) it will make an amazing difference to your flying but especially your hovering and pickup and set down. Just the visceral input and the finer control will improve your flying. If your a rotor head something like this has gotta be on your to get list.
-
TBH map efficiency for my Rift setup is as follows, single player with reasonable eyecandy. NTTR best performance can get mostly 90FPS. Caucasus same deal but don't hit 90FPS as much. PG rarely see 90FPS mostly 45FPS but also see major slow downs. Normandy Most times I get 45fps of course this will vary with settings but above is with same settings so illustrative of how it works relative between maps. Don't forget a laptop CPU and GPU rarely preform as well as desktop systems so your going to get some performance hits right there. The reason the temps are controlled is there simply isn't the thermal capacity in laptop hardware hence performance is throttled. DCS needs clock cycles and GPU grunt and lots of it.
-
I sometimes think VRS is blamed even when it more a case of not enough power to slow decent, Just my thinking here and I may well be wrong. However the only times generally when I have issues is when VSI is well above 3mtr/sec to 5mtr/sec vertical descent no relative H movement, depending on load. Un-checked VSI increases very quickly to a point where you do not have enough power. This also may or may not invoke VRS but generally you got there by descending to fast. And usually attempting to save yourself you have (and again a great point about leverage and fine control of collective input) you end up bleeding off rotor speed and associated loss of rotor efficiency (effectiveness) which of course cascades until the earth catches you . :cry: As an observation I generally hear people coming in hard hit the ground and they then claim it was VRS but the sound of the rotors says completely different. Question wouldn't the loading on the rotors be less in a VRS situation and increasing blade pitch only adds to increase the zone area of rotor affected by VRS? As I understand it stepping sideways into undisturbed air is recommended to get out of VRS.
-
Just back into an object (mostly) works for Mi8, Huey and Gaz. :music_whistling:
-
And that is exactly why I build my own controls. :thumbup:
-
I have no problem inducing tail rotor failure, just clip it on a tree or other object and heaps of practice,... :music_whistling:
-
Modified Logitech 3D Pro, no centre detent.
FragBum replied to FragBum's topic in PC Hardware and Related Software
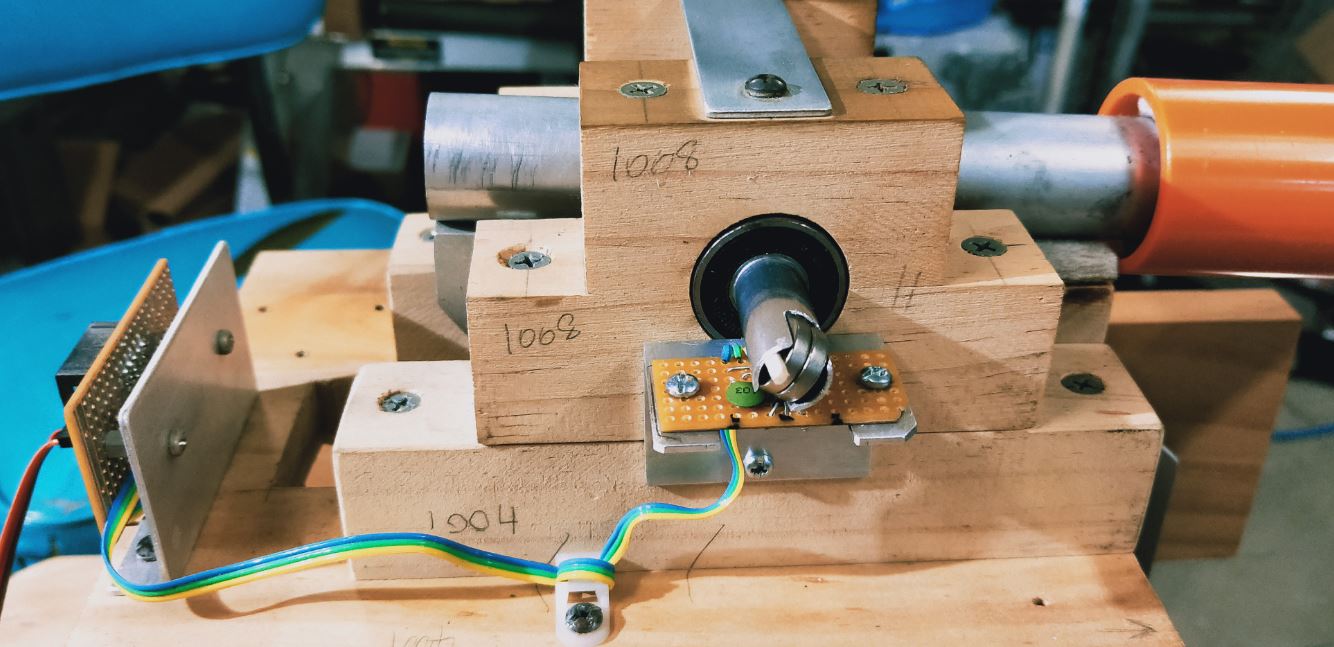
Well necessity is the motivator if invention, so the collective pot got replaced last year because it was spotty, they don't seem to last long! Now maybe I am becoming more fussy in my old age but damn it, it got spotty again cheap potentiometers. So the collective got an upgrade and now sports a HAL effect device, took the helli s out and fine tuned the collective and wow it's a keeper folks. The trick with the double magnets is I get about 55deg of rotation and a single gives about 40deg for FSD of output.
-
This can happen sometimes just delete the items that don't apply then go to the input(s) you want to use that item(s) and select from the dropdown box in the corresponding column for the wanted source, read the header names on each column to identify the source device for that column. That should enable you to sort them out, sometimes deleting all of them can be easier and manually setting the inputs.
-
[ALREADY REPORTED]two floating cranes on Caucasus map at Apsheronsk
FragBum replied to Floydii's topic in Object Bugs
Huh they must really be Skyhooks,.. :megalol: :music_whistling: -
Gotta be the Mi-24,.. :thumbup: :P