FragBum
-
Posts
2426 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by FragBum
-
Modified Logitech 3D Pro, no centre detent.
FragBum replied to FragBum's topic in PC Hardware and Related Software
Well I use the hall effect devices for collective and anti-torque controls, you just need to scale them in the settings to get full range, cyclic is next. I have the basic machinics just need to implement the sensors. So yes they work fine with Leo Bodnar, your range will be slightly reduced but you need to make allowances for this in your design and DCS settings. -
DCS Mi-24P feels very twitchy
FragBum replied to Hummingbird's topic in Controller Questions and Bugs
The MI24 seems fine, certainly not twitchy at all, if anything maybe a little soft but likely just the stability assist, so far a gem to fly, -
Um it seems fine to me, maybe beginners luck but not difficult at all.
-
For me I am waiting on both the Mi-24 and the Kiowa. As for the Mi-8 it's actually a fairly agile bird and given the weight and power IMO makes a fairly good choice if your looking at the Mi-24 when it finally gets released. ;) Having said that the Huey is a blast to fly as well, even if a tad under powered. Vertex ring state, you mean settling with (out enough) power. :lol: The Ka-50 still needs antitorque input, granted it isn't as responsive. my thoughts anyway. :thumbup:
-
After the Gazelle, buy another Polychop Helo worth the risk?
FragBum replied to marcoscosta's topic in Polychop-Simulations
Yep on the to buy list for me. :thumbup: -
What do you use as a Collective?
FragBum replied to melchionda's topic in PC Hardware and Related Software
I just built my own. :) -
@RePhil, thanks for that. Once I build my controls the Gaz and all other helis are great to fly with no saturation. :thumbup: :)
-
Modified Logitech 3D Pro, no centre detent.
FragBum replied to FragBum's topic in PC Hardware and Related Software
Good to hear Gizmokev and yes it becomes much more immersive when the controls are more "real life" like.:thumbup: Oh and 705NAS Awesome. -
Modified Logitech 3D Pro, no centre detent.
FragBum replied to FragBum's topic in PC Hardware and Related Software
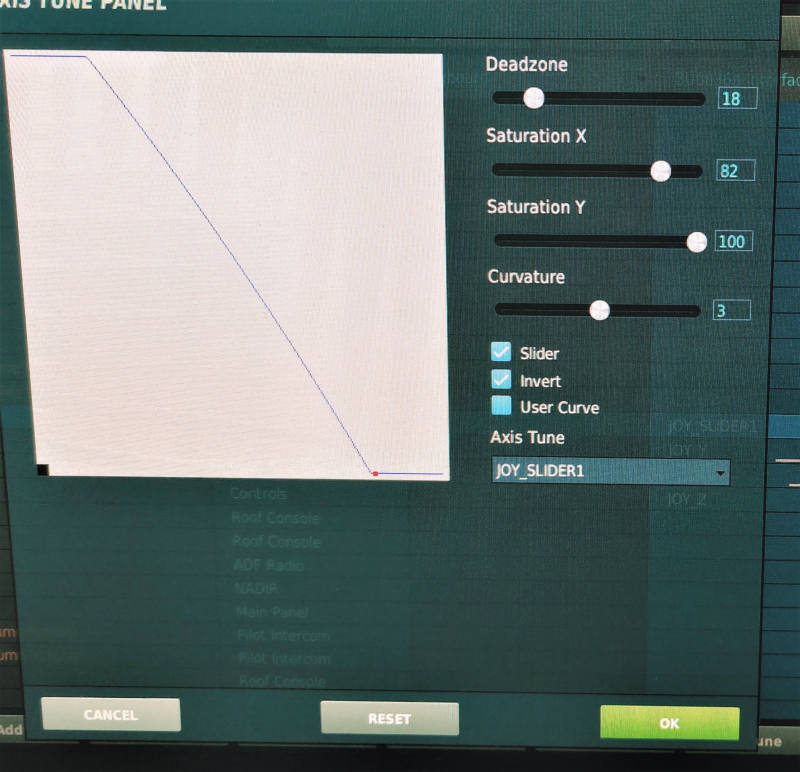
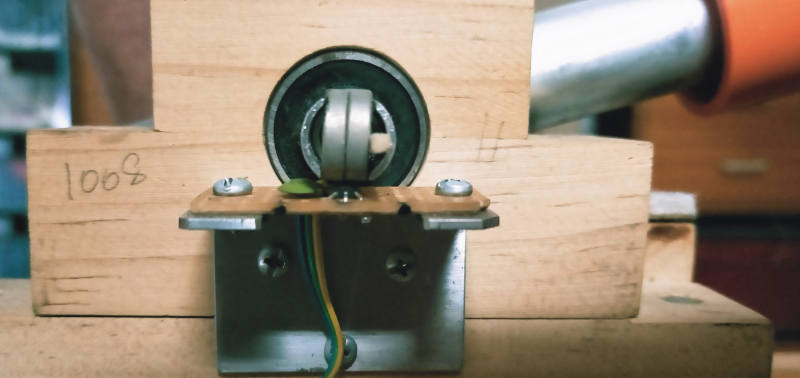
Okay what I found is with 2 magnets I got increased angle of rotation over that of 1 magnet. They are stacked n-s:n-s just watch your fingers they will snap together, I tend to bring the edges together and slide them together. The pivot point is pretty much dead center over the HAL device which I bought from the Leo Bodner site, I also use the BU0836X 12-Bit Joystick Board for input as well there are many others out there but I can say this one works a treat. The sensors are A1302's and yes they work just like a potentiometer as far as the controllers analogue input is concerned. here http://www.leobodnar.com/shop/index.php?main_page=product_info&cPath=103_82&products_id=195 The sensor is mounted on some matrix board (I'd like to say Veroboard but.) the stuff I used is cheap and cheerful but available locally. This is mounted on a bracket fashioned from aluminium angle and allows slight wiggle room for setting the assembly invplace, AKA slightly larger holes and washers. Now it is best to position the sensor as close as practical to the magnets keep in mind some clearance is required to allow the magnets to rotate with out touching the HAL sensor. What I have done was to align the magnets so they are vertical at the halfway point of travel for the collective, i.e. collective half way up this gives pretty much the maximum amount of travel. The limitations and there are a couple. Because the output from the HAL device can only vary between about 0.7V to 4.3V actually a little less to keep everything linear and smooth. you will need to adjust the curve in axis tune to get full scale input. This also allows you to shift the start and end points so you have full range input. here is how the collective input is set up. Whilst I could get about 55 degress of rotation with 2 magnets in practise it's more like about 50 degrees usable or so still more than enough for the collective I have the design process of course will dictate how much angle of rotation and how much travel you end up with and something you might want to consider if your wanting to model a specific helicopter, I kinda went generic and that works fine for me. As for the amount of angular rotation needed I have found that at least for the collective and pedals the 50-something degrees is more than enough the cyclic will likely end up with only 1 magnet and should provide more then enough throw. As for a gear box you might find the backlash a tad annoying. :)
-
I'll just park this here :D The only DCS Heli I haven't successfully done a loop in is the KA50 :megalol:
-
Yes and some have different "hard points" even in some maps some buildings have none and you fall through,.. :megalol:
-
The mingun version is lighter again especially when you unload the amo with better visibility. just saying. An BTW watch out for VNE coming out of the loops. :D
-
Well for me going from 1080Ti to 2080Ti gave the ability to increase some settings in VR but it was a welcome improvement but in no way an "OMG" increase. Well it was as far as the numbers go but DCS VR only a bit of an improvement. However for VR in my experience higher CPU clock speed will give you better performance. That's just my observation. FWIW.
-
Exactly either get better input devices or use curves to compensate, I thought sim meant simulate real world not pretend, just saying. I can't see those that a right into the motor sport sims looking for an xbox steering wheel and pedals as "proper" input controls okay for a bit of a laugh just look at the effort they got to. Then there are the DCS simpit builders I'm pretty sure they don't want a $20 joystick to be the reference input device. :music_whistling:
-
Some musing on using a joystick as I have found this can also be an issue with the helicopters, especially the Gazelle. I first had issues flying the Gazelle and investegated what appeared to be a dead spot right bang in the center of X and Y travel. This also corresponds to the mechanical centering position. At first I thought is was just a mechanical "thing" as in overcoming the spring tension exerted on the joystick center. However it wasn't long till I removed the springs from the joystick and noticed a small but definite deadspot using the setup function in DCS looking at the transfer curve as the stick was transitioned from left to right or back to front there was was a distinct deadspot well more of a snap of the controller output to center of output and a noticeable amount of hysteresis, that is the amount of movement required to continue input was exaggerated. AKA a deadspot! This occurs in both the X and Y axis of the joystick and makes a neat way for the joystick to have little or no effect in the mechanical center but sucks for helicopter sim flying. This especially applies to the Gazelle where the cyclic input is so "centered" and likely less of an issue for say Huey or Mi8 where without trimming the cyclic is slightly aft and either to the left or right of center (ish) Even if you do trim I feel the higher mass makes this less apparent in the larger helicopters. IMO. The next thing and I am in no way saying you can't use a joystick (but you tend to notice the ones that are using a joystick on servers, just saying :music_whistling:) heck I know of people using keyboard. But. Having an extension will help considerably as fine manoeuvring requires almost no movement just a slight pressure on the cyclic to accomplish. Having a mechanical centering function also IMO does not help.
-
Ah yes and for me that was a case of the mysterious "re-enabling of the FFB" it happens sometimes after an update.
-
@Holton181 What controller and input device are you using?
-
No, well maybe you've built your own pedals the rest of it is just an extension of that, I did the same. Trust me once you get a decent cyclic input a joystick will not be your choice for helis. :thumbup:
-
So for those that make the effort to build a pit with approximately proportional inputs or buy them, you would have the coding to suit a $50 joystick. Thats called game mode isn't it? I'd prefer it as a flightsim first and foremost. :) There are a number of fudges you can make using saturation on the cyclic input to compensate for such a short through and the detent center of a joystick and it's return springs but you than loose some authority of the cyclic. Trust me if you think the Gaz's cyclic is sensitive try an R44 that was a real eye opener. I wont argue flight models but Huey ,Mi-8 and Gaz feel the same as far as cyclic input, take into account the mass of the aircraft and the rotor head type, they actually respond in similar fashion.:thumbup:
-
If I might make an observation here and assuming kinda standard flight pedals with that dreaded "centre detent" action. Then yes I ran this sort of setup because it helped overcome the mechanical centering effect of the pedals and reduced (after practice) over correction and allowed me to jump right on the ball as it where to keep the Huey (and other helis') facing forward with a tad more control and less effort. I got rid of the mechanical center detent in my old combat pros which helped a lot but building my on "anti-torque" pedals made it that much better. However as a general heli thing using so called flight sim pedals yes it helps adding such curves and I'd suggest trying it and see what it brings guys. :thumbup:
-
But terrible field of view,.. isn't that still heavier though? :lol: :thumbup:
-
Easy when you place the aircraft on a mission or edit a mission select the aircraft and change the load-out to zero ammo or as required. <edit> Wait a minute If I apply your previous communications idioms you are actually asking can one remove the minigun and not, not load the minigun, as I understand it from Sven, no you can not. AFAIK.
-
I see,.. you got it sorted.
-
Why is it So hard to land the MI 8
FragBum replied to tusler's topic in DCS: Mi-8MTV2 Magnificent Eight
Me neither. ;) That's interesting, I modeled my pedals so the physical movement was about the same as the "virtual" movement in game and I don't feel the need for curves. -
I think flying the Gazelle or Huey or for me and DCS heli with a joystick would be difficult at the best of times and for a number of reasons. Cyclic action would be to sensitive given the throw of a typical joystick. Collective operation limited to a small throw "throttle" control to control lift. Anti-torque pedals limited to an almost unnatural twist of the wrist to control yaw. Still given your situation some saturation on cyclic might help initially, maybe 30 to 40% Some curvature on collective to spread out the lower control range could help. Maybe also some curvature to reduce sensitivity of anti-torque on the twist action so it's fairly insensitive around center of action. I started with a 3dPro joystick and soon found I needed actual pedals however for helicopters you really need pedals with no center detent. And for that matter a cyclic with no center detent. Add a collective and a long throw cyclic and you soon get the feel for helicopters.