pierrewind
-
Posts
108 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by pierrewind
-
Spencer Suderman has compiled the roll rate of many aerobatic airplanes. According to his findings the roll rate of the CEII is right about 164°/s . Many variables are unknown though. At the moment, to me the CEII flight model is quite a way off in many aspects including roll rate. The roll rate has some kind of weird acceleration/deceleration going on, making it very unpredictable. These deep flaws lead to the inacuracy of the the flight model and to the discrepancy with the expected behaviour.
-
[ALREADY REPORTED]Radar bars can be increased to 167+ bars
pierrewind replied to Beanbag Ninja's topic in Bugs and Problems
Same issue here... Not too sure about how it came to be though. Scan azimut to more than 1100 degrees as well...
-
Devs we need a period of Glasnost! Transparency
pierrewind replied to LupinYonder's topic in MiG-21Bis
I'm with you on that one. Promisses are great. But to me, to put things in perspective, In the timeframe it took heatblur to create the Amazing F14 and enhance on the Vigen; Magnitude managed to come up with... a not so well done christen eagle, and not many improvements to their mig-21... I really wish them succes; I am very interested in the F4U and F8, but Let's say for now, my enthusiasm is very much restrained by questionable competence to deliver quality products. I applaud the work that's been done, but to me there's still a long way to go. -
Are you sure the autorudder is disabled? On the yak 52 based on my limited testing, the rudder is to be used during all phases of flight. As for the engine modelling and it's performance, I haven't checked the numbers. However, Performance asside (which to me is believable), The behaviour of the Yak 52 engine is correct. Instantaneous MP pressure increase with power, propeller overshoot at speed if the power is increased quickly... We are dealing with a good engine model. The christen eagle well... is a constant speed prop being modelled like a fixed pitch but with some tweaks to mask some of these deficiencies...If you add a quite bad flight model to this what does the Christen eagle bring to the end user? A 3D model? Yeah... I'm not saying the yak is perfect, it is not. But the christen eagle module is to me not even close to the quality offered by the yak52.
-
While, the yak 52 has its flight model issues (reverse airflow but mostly inverted stall problem), it is in no way comparable to what the Christen Eagle offers. The Yak 52 displays a mostly believable and coherent flight and ground model. It's engine dynamics are on point, and while being a relatively low perfomance airplane, it does what it's supposed to do nicely. I also disagree with you BBRZ, to me, the yaw is quite well modeled. During loops, the yaw corrections for most propeller aircrafts are very minimal. I think the Yak 52 FM is adequately displaying it. To me this is quite the opposite to the Christen Eagle. To me, the Christen eagle displays some significant errors in its engine modeling (the only prop airplane in dcs that is nonsense). The ground handling is Meh and to top it off, the flight model displays some big flaws. Like...The roll behaviour (any pitch correction during a continuous roll feels like a snap but it isn't. there is some weird acceleration/slow roll rate); at low airspeed the engine effects are overpowering the aircraft and the snapp roll/ tumble behaviour is odd at best. To me there aren't many things to enjoy with this christen eagle at the moment. I am part of those who regret buying it. But clearly I don't regret buying the Yak 52!
-
To Me, there are currently some big flaws to the flight model. 1) Too much perfromance. The Wing has a CL too high between 40% and 80%. This CL is directly responsible for a increased instantaneous turn rate by about the same number...Bad 2) High alpha flight caracteristics. As you get into High AOA, according to the mig flight manual, you should start to get into buffet. 3) It will not stall 4) As per the mig-21 flight manual "If the control stick is not set neutral immediately after onset of stall, during 3-4s, the aircraft will start oscillating briskly and unsteadily about its three axes, with high lateral g loads and rudder forces", "rocking of wing to wing". But since the current mig-21 is not stalling, it's not really relevant... Therefore to me, at the moment the flight model is badly flawed. As for the UUA-1, my personal position is quite different from Riojax. My testing showed -Perfect linearity between AOA and UUA at all speeds -Mach effects showing with a good predictability and in accordance with papers from the NASA. As such, to me, the behaviour of the probe is to be deemed accurate. Now, Riojax seems to be convinced that this probe should not display any errors due to non referenced calculators. However, to my knowledge no such system exists on the mig-21; the probe is only calibrated to show correct LOCAL angle of attack based on ACTUAL LOCAL angle of attack. I see 0 mention of any compensation between measured (actual) LOCAL AOA and actual AOA. Therefore, to me the UUA-1 Probe is behaving as it should. I'd love to hear more from Riojax as to why the UUA-1 probe does not behave correctly, but I need this info to be based on facts and available documentation. PS: Riojax, I think when you're saying the the behaviour of the UUA probe is incorrect. I think you say that based on Max CL coherent, then as you pull to a specific UUA, the CL doesn't stay coherent. You assume this error is due to a faulty UUA behaviour. However, based on my personal testing, I would tend to say the behaviour of the probe is correct. Therefore to me the only variable left is the CL i think the CL coded by magnitude is wrong. Your point of view is that the probe is wrong and the flight model correct. I want to hear more from you as to why this UUA sensor is bad as that could clear up some misconceptions from anyone.
-
To me there are some significant low speed controlability issues. It makes some of the maneuvers not work as it should. Hamerhead is part of it, but a basic imelman could be a problem. I wished some of these issues where looked into but no com from magnitude... The christen eagle is a great little monster. But to me the FM in DCS is very much sub par. (impossible to fly actual advanced sequences properly... weird behavior when pushed, or during rolls) If you want to go proper hardcore aerobatic, I would suggest Aerofly FS2.
-
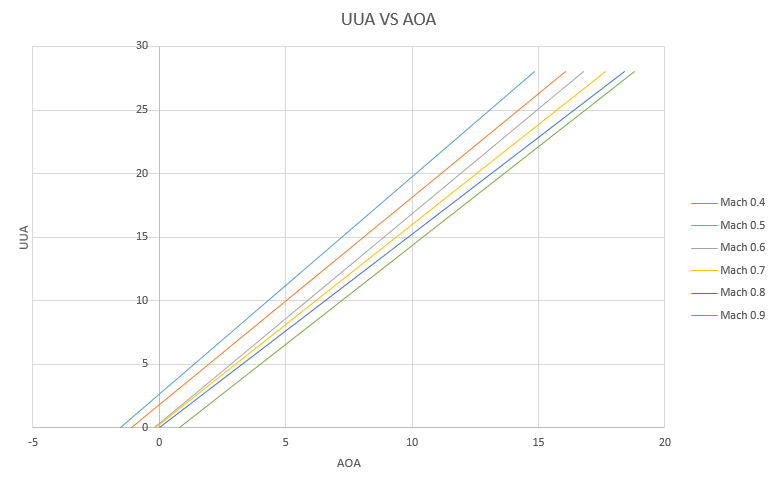
Got to play arround With AOA vs UUA. Based on data obtained, the linearity of the the relation is confirmed. (At 0 UUA, AOA was extrapolated). This shows a correct behaviour in regards to the variation of UUA and AOA. The mach effects shows up with an almost perfect predictability. It seems to be maybe a tad too strong, but it is coherent to the papers shared in this topic. With this data, the behaviour of the UUA probe is to be deemed reasonable. :pilotfly:
-
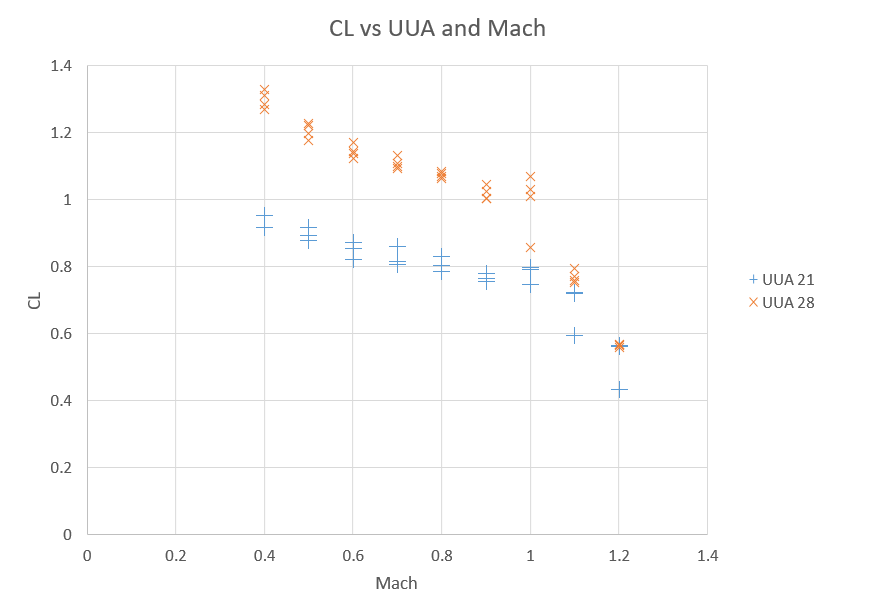
Some quick testing on my side. (see attached Sheet). I yeld very similar results to those found by Riojax, which should be considered as a good sign :P . Based on actual Charts, it shows a significant increase in CL anywhere between 40% and 80% Outch... It shows a clear downward slope that shouldn't exist. I kept the data above mach 0.9 for reference. However my flying wasn't precise enough to consider these values as accurate. I was mostly pulling too much as the speed decreased. This would tend to confirm a drop too charp in the current flight model as it should mostly remain constant below mach 1.1-1.2. However At these speeds, we actually get closer to the expected flight performance. Now for the AOA issue. I must say, I'm getting down the rabbit hole at this point. On the attached document this is what is being said for a configuration similar to the one used in the mig 21 (page 11) "The tests were conducted over a Mach number rsnge of 0.6 to 1.02. Sample calibrations of the installation at M= 0.6, 0.81, and 0.92 me given in figuree 13. These data, as well as those at the other test speeds, show a linear vsriation of local angle of attack with true angle ‘- of attack. The data also show that for constant angle of attack the local angle of attack decreases as the Mach number increases. In addi- - tion, the local angle of attack is shown to chsmge about 1.6° for each degree change in true angle of attack. Faother locations of the sensor on the nose and for other fuselage nose shapes, the variations of locsl singleof attack with true angle of attack will, of course, be different." The variations are mostly due to mach effects in this document. This is expected; compressibility is Bad! But what is really important is the corelation between actual AOA and measured AOA is maintained. This perfectly applies to the Mig 21 and the UUA. Based On my data, I show that as the UUA is maintained (within 1 unit below mach 0.8 ) it doesn't maintain a stable AOA. We are talking about 1-2 degrees difference; this isn't very significant, but that is noticeable. This could be explained by Bad uua logic, Bad AOA logic (not as if there are no bugs in DCS :cry: ), or mach effects/actual probe errors. This makes the calculations potentially out of place. However, As the UUA is maintained, the CL increases with a reduction of speed; it shouldn't. But if we look at this through the AOA, as the AOA reduces, the CL Increases; it shouldn't. So wichever way we look at this data, it just doesn't work. Which would tend to confirm the current flight model Is way off. There is a last note I have to point out. During testing, I found a discrepancy between the reported fuel level between DCS and the one reported by tacview. I used the one reported by tacview. It was showing more than the one reported by DCS; therefore it is likely to contribute toward the higher found CL. 6284.4 was FF with tacview; 5027 was FF with DCS. This could possibly contribute to a false reported 6% performance gain. Edit: added UUA 28 info. Similar result found. DCS Mig 21 FM testing.zip
-
https://forums.eagle.ru/showpost.php?p=3457419&postcount=2 On page 54/55, there is the description Of the UUA. It clearly states that the UUA "IS" the AOA and it is not variable it just is data as is the speed, altitude... It makes sense to find a correlation between the two in DCS! I will try to get some DCS data tomorrow and make it stick together. But right now I think we are creating issues with that UUA that are not actually present. Edit: Due to the positioning/Flow error on the vane, there is a discrepency between actual AOA and UUA indication. Similar to the difference between Calibrated and true airspeed. This difference doesn't prevent one given unit UUA to allways be equal to a same AOA. https://forums.eagle.ru/attachment.php?attachmentid=105667&d=1412951059 This article might help shed some light.
-
I am really not quite sure to understand what the issue is. Just because it probably is something trivial, let's go back to basics. On your said calculated chart (not actual data if I understand correctly), I see mostly everything being coherent (more on that later). On a given wing, at a given angle of attack, the CL should remain constant. That's actually true for low speeds, but as we get into compressability issues (higher mach), the CL can change slightly hence the bump on the chart. As this angle of attack should be "fixed" I do not see why we have a static UUA and a variable AOA. This just doesn't make sense to me. As such, I would tend to think that something is leading you to believe the AOA should change. I think If you could tell me more as to why this aoa value is changing, we could nail this data. Based on my very limited testing in DCS, I see perfect correlation between UUA and AOA irrespective of the speed. As it should be according to the DCS mig manual. As for the achievement logo... hum... something like a kerbal test pilot would make sense I think :P
-
To me I don't see any issue in respect to UUA vs AOA... it seems to be linear as expected within acceptable error margin.
-
Thanks to you for this great piece of research. Assuming this computation is correct as is my reading, I am forced to disagree with your observations. -According to the orginial chart, below mach 0.6, @33 pull, You should be obtaining a stable CL @0.8. From your testing, it is shown at a value well above 1.2. This equals to a 50% performance gain. To me this is very very far from being negligeable. -I also think you somehow missed a few important details. That is perfectly normal when working on such advanced computing. But, you cannot put a curve For UUA @ 33 without this value being maintained. I understand this was not possible to test at low level as you would have gone well above max G. Should you wish to continue your blue curve on chart 1 past mach 0.6, you need to fly higher, this will have the effect of reducing the air density and therefore allow you to perform the tests correctly. -I know there is some very complex wording and formulas involved. When you are saying max pull, I assume you are talking about maximum stick input. This maximum stick input doesn't show anywhere on the original chart. You shall plot the max stick input based on the associated UUA, speed and CL, according to my observations, you do so solely based on a combination of speed and CL which is not scientificaly correct. What happens at this point is the g protection kicks in before you are given the chance to reach max CL. This is somehow solved in chart 2 by smartly saying telling R2D2 to sleep but, climbing would work as well. -For your testing, The UUA 21 chart seems to be using the perfect technique. Unfortunately, it shows again a gap to the actual chart between about 50% and 30% gain. IRL that would likely equate from 7g instantanuous being improved to about 9.8g. As you can see this is a very big difference to the actual aircraft. The variable that is not explicitely stated in the original chart is the altitude. The test pilots have had to fly at much higher altitude in order to obtain the values without putting their lives at risk (like pulling 20Gs :cry: ). In theory, this entire chart could be ploted flying at 1g. (very stupid to do IRL; probably even impossible.) The great values you obtained should ideally be looked at in their entirety. I stated on different points that the CL was up to 50% higher. This difference could also be explained by unprecise weight, wing area, density. But, if the entire curve manages to have a similar shape, only a coherent g load could validate the entire chart. But then, the given lift coeficient for a given aircraft is just one part of the equation. Drag, and above all controlability are critical factors to consider. According to the actual flight manual, the current flight model does not exhibit any of the caracter the real life mig 21 should have at high AOA. That's what I miss the most with the current mig21 flight model. I really thank you for your amazing dedication and work! :joystick: Unfortunately, to me all it proved if it can prove anything is that the flight model is very very far from the actual aircraft at the moment. By the way, well done on passing my reasonability check, it's not every day you see some coherent data!:book:
-
You don't want any opinions but, you are of the opinion I lie? Please be coherent. The delta wings do have very nice high alpha carateristics. This is allowed by the self generation of very strong vortices on the wing leading edge. Unfortunately, these vortices do produce a huge increase of drag not currently visible. Also during a stall, most aircrafts will tend to drop a wing, sometimes even exibit dutch roll. At the moment, there is none of that. The other big issue is that according to this chart provided, from 28 to 33°, it is a dangerous operating area as there is a possibility of stalling (black and red area). I haven't managed to be punished by flying in this area, or beyond... And the turn rate does actually looks beneficial. To me, It starts to be a bit too much... Drag not punishing, and flying not punishing nor challenging. As other said, it feels like flying on FBW. But, this is just my opinion whether you like it or not. As for your question, to date I have flown 23 different types. I stalled most of them. Gliders are: WA30 - SNC34 - G103 - DuoDiscus - FOX - ASK13- C201 - C101 - LS-4 (HK36 and SF28 not stalled) Airplanes are: C152 - C172 - C182RG - J3 - PA28 - GA8 - Citabria - Christen Eagle - PA30 -PA31 (CRJ200 and 900 only "stalled" in level D sim)
-
I agree with what has been said. The high AOA flying is a step back... One day Magnitude will learn to do flight models.... Maybe I won't be nice to Magnitude. But I think, the split was a great thing for Heatblur. Heatblur has delivered on their promises and brought one of the most glorious aircrafts in DCS. In the same timeframe magnitude has delivered a CEII; to me the worst module in DCS (which I could have been flying way more since it is a very challenging and fun aircraft IRL). They've been promising updates most notably on the CEII sounds for more than a year now... Just for a sound pack... Quite frankly I would not be surprised to see them fail in this buisness. I just hope the customers won't be harmed...
-
No worries, you do not have to believe me. This is just my opinion sharing my personnal point of view based on my experience. If you don't want to believe it, it is up to you. But... My opinion is that the flight model is bad. This is mostly due to the fact that it does have a very inconsistent roll rate. If You try to fly any kind of advanced or even intermediate sequence it just doesn't work. The slow rolls and the snapp rolls are really a pain with a stupid acceleration/stop at regular intervals (it is for example mostly impossible to do a slow roll at medium to low speed without provoking jerky roll rate...). This is to me a very significant part of an aerobatic aircraft and it is badly simulated; making the experience disapointing at best. Something just doesn't work. This flight model feels like a bad script... going in and out of some conditions... None of the aircrafts I have ever flown even came close to this behavior...
-
I've said it before, but the CEII is in my opinion one of the worst aircraft available in DCS that I have bought. The sound is awfull The flight model is rubish The engine model is not even a thing The ground handling is... basic This airplane has no charm, no character... it doesn't even give you any feedbaack, it is just a bunch of rubish lines of code... You could even do better with sims like FSX... This is sad. I have actually flown the christen and I loved it, it could bite you, but as you learned how it flew and respected it, it was just a sweet and very capable airplane... Minus the unconfortable ride in turbulence. Any time I try to fly it in dcs I am pissed after 5 mn... The yak 52 while not perfect is miles ahead... Magnitude 3 should have more care towards their customers... I somewhat feel I bought an empty shell...
-
The CEII feels very unfinished/low quality - where are the updates
pierrewind replied to hazzer's topic in Christen Eagle II
On the visual side of things I find it good enough. However, the flight model has some major flaws. making it almost unflyable for me. The roll rate is very badly modelled and almost random (I know, it's not). Ailerons only rolls ok, but if you feed it too much rudder it "snaps" without even having played with elevator. This behaviour is unrealistic. On sanpp rolls, the roll rate is very unstable, again, this is unrealistic. I would also like to see the ground handling model revised. To me the prop RPM feels also very odd (I wil say engine dynamics in general), but mostly because of delay in manifold pressure to my input. With a violent input, one would expect the manifod pressure to jump. As a result the prop rpm should quickly increase, then go past the set RPM and then the governor should kick in reducing the rpm. Usually the overshoot is about 50rpm; none if you are slow on throttle or zero speed. This effect should produce a very noticeable sound. If they can manage to fix the flight model which btw has some very good dynamics in other areas (mostly negative airspeed), and fix the engine modelling, I'd be quite happy with that. However as of now, I have to say that the christen eagle is very disapointing. Ps: if you want to see what engines dynamics and flight model should look like, the YAK 52 is at a far better state. -
I agree with you. I wouldn't expect the aircraft to be stuck in this power on stall. To me it felt very unatural.
-
I'm not sure what you are exactly referring to. However, to me the issue is mostly present on negative stalls/spins. However if a negative snapp roll (flick roll) is allowed to develop into a spin we are back to this issue. From some quick trial it will usually happens after 2 or more turns of a snapp roll. It will of course depend on your starting conditions and your technique (I start at about 200kph, full negative elevator, full rudder and full ailerons in the direction of the turn [since we are inverted, if I quick the left rudder, I will roll to the right, requiring right aileron; if i was upside I'd use left aileron]) Well your explanation is a tad simplistic. The nose should drop because airplanes are normally designed to be able to recover from a stall. It would be too hazardous otherwise. To do so, designers are required to play extensively with chord, profile, area, span, incidence, and position of the wing and elevator plus a precise position of the center of gravity. It is simplistic to say that if I hold a hammer on any specific point, it will necessarily fall on the side of the head. Depending on how I hold it (the air interacts with the airplane) the results could be vastly different. To make sure an airplane flies well upside up is difficult. A lot of airplanes have some quirks and do things that are out of the expectations of anyone. This is truer when pushing the flight envelope flying aerobatics. Also, the ailerons and the elevators do have authority. In fact the ailerons are often used to turn a normal spin into a flat spin (along with some power). And are also on some airplanes required to exit a spin. shows it quite nicely. Opposite aileron makes the spin more flat, inside aileron can actually be enough to recover from a spin, and drops the nose. The elevator is also far from useless. It can influence a lot of different things. (Such as rudder masking). It usually has some authority and is in most case necessary to exit the spin. (on the mirage III there are specific yellow hash marks on the stick and side console to give the correct stick position for a spin recovery)
-
Well, I disagree with your opinion. One of the "standard" recovery is in fact PARE -Power idle -Ailerons neutral -Rudder opposite -Elevator to break the stall It does work for a lot of airplanes. However, an aerobatic aircraft is by definition able to play a lot more within the flight and stalled envelloppe. It can include pilot induced flat and inverted spins. Now the problem to me is that on some failed maneuvers (ex: top of humpty bump), or voluntary inverted flat spins the airplane can suddently get locked into this stall. It really feels unatural. Then , the pitch is lost wich again for an aerobatic aircraft is odd. I also am able to stop the rotation with ruddders, changing the spin to a stall. A stall is normally recoverable with power. (at this point the gyroscopic precession does not apply anymore). This is what makes me believe the flight model is flawed. I might be wrong, but I'd be very surprised to hear from actual yak 52 pilots that you can get locked in this upside down stall/spin only being able to recover with power to idle. PS: I actually have this stick and rudder book at home, but it is going into the basics of flying relevant to a cub pilot. Which is not what I'm talking about. I'm talking advanced aircraft handling and playing with it way beyond that boring normal flight enveloppe. Sorry, If I confused you in any way.
-
Nope, I later tried the recovery from very high. (see track) When in this position: -The rudder has authority -The pitch is "locked" -Ailerons are ineficient The only recovery that seems to work is to bring the power back to idle. I have never flown a yak 52, but for an aerobatic aircraft, this behaviour is odd to say the least. YAK 52 inverted stall bug recovery.trk
-
Hello, I regularly end up with a yak52 stuck in some kind of inverted stall / spin. I fly low so the opportunity to recover is low, but the controls don't seem to have any effect on this issue and I end up crashing. (see tracks) Is it known? YAK 52 inverted stall bug.trk YAK 52 inverted stall bug2.trk