yogi149
-
Posts
376 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by yogi149
-
Hi, das ist ja eher das, was ich für Kunden nicht möchte. Was müsste demnach ein USB-Board können, damit es "plug & play" wäre? (Und was unterstützt DCS bei der Config?) Reicht es Bords mit 64 / 128 konfigurierbaren Eingängen zu haben, die einfach an Panels angeschlossen werden können? Für meine Controls verwenden ich aktuell die BBI64 von Bodnar, da man da eben durch das gemeinsame GND ein Kabel mit z.B. 23 Signalleitungen und nur einem GND benutzen kann. Die steckbare Verteilung mache ich erst im oder kurz vor dem Griff. Am BBI wird nur 1 Buchsenleiste mit 2x23 auf die Pins vom Board gesteckt. Beim BBI wird über die Software gesteuert, was am Kontakt "arbeitet", Schalter/Taster oder Encoder. Der Trackball ist übrigens auch ein Kensington geworden. an die Bedienung muss ich mich noch etwas gewöhnen. Und ich habe noch die Arme für das rechte Seitenbrett auf die lange Version getauscht. hat schon mal jemand eine Schwenkmechanik für eine Tastatur gesehen oder gemacht, die die Tastatur durch ziehen direkt um 60-80° reindreht? So etwas werde ich mir wohl mal dazu bauen.

-
hm, dann sind das aber doch keine regulären Schalteingänge wie die Tasten auf einem Joystick. Bin ich ja immer noch nicht schlauer. Es geht darum, ob mein italienischer Kollege eben Einzelboards mit 128 oder eben mehr Eingängen machen soll. An einem Ausgabeboard tüfteln wir auch, um z.B. die Circuitbreaker bei einer EC-135 auszulösen.
-
super. Und wie genau steuerst Du die jetzt an?
-
selbst USB 2.0 hat 480 Mbit/s, da solltest du auch bei voller Belegung nix merken. Mein Board hat insgesamt 12 USB Ports. Davon die Hälfte mit USB 3.1 (10Gbit/s theoretisch) Da ist mit Sicherheit kein Geschwindigkeitsproblem zu erwarten. Aber es geht immer noch darum, ob jemand tatsächlich mehr ale 128 Schalter/Taster am Pit in Funktion hat. Windows 10 zeigt ja direkt auch nur 32+4 Eingänge pro Controller an. Hier der Beitrag: https://forums.eagle.ru/topic/273981-max-joystick-buttons/
-
Schalter und Tasten, nicht USB Geräte. Gelesen hatte ich das im Home-cockpit Unterforum. Hast Du denn alle 240 belegt?
-
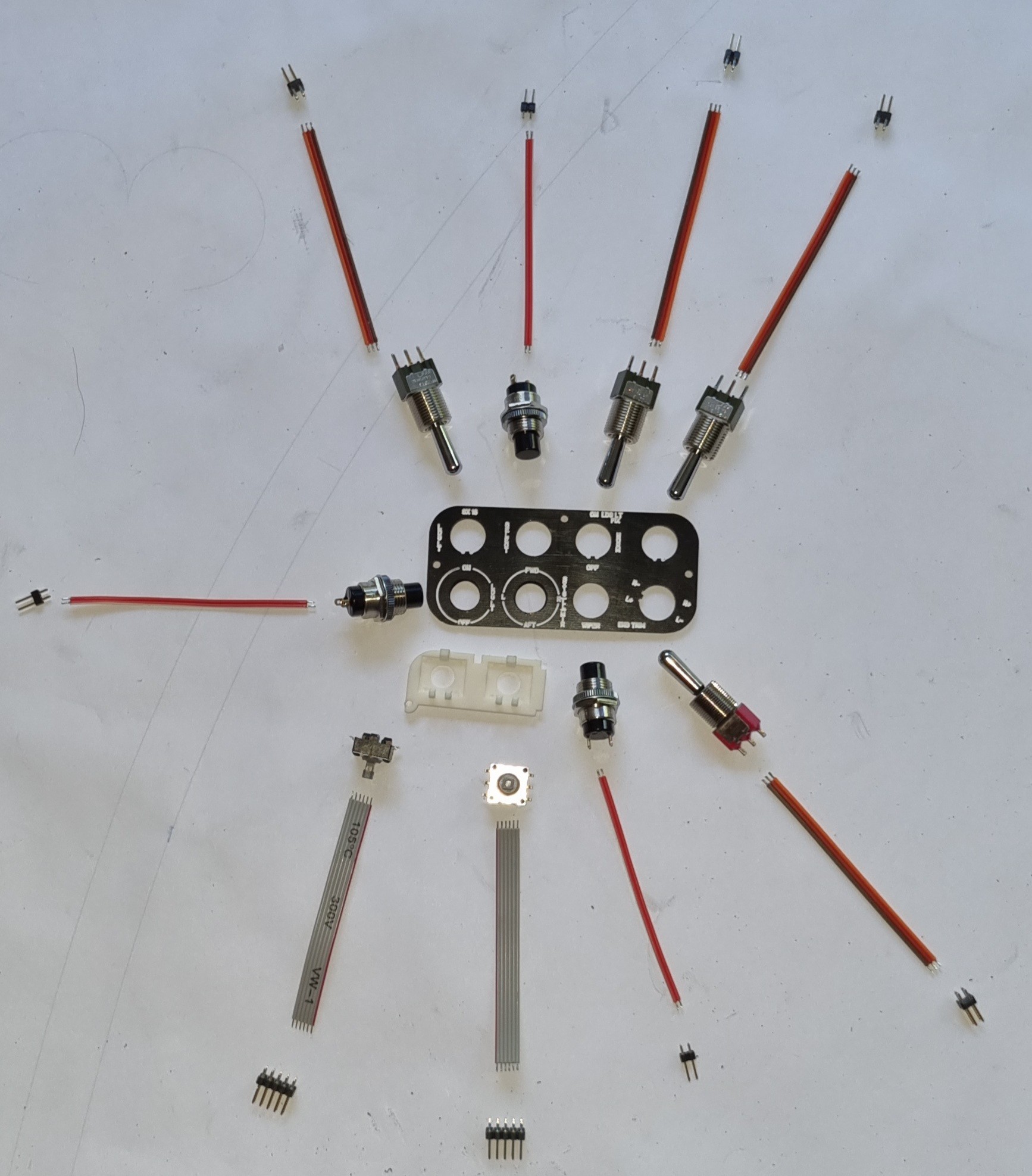
so sieht dann der Schaltersatz für den oben gezeigten Griff aus: alle Coolies, Schalter und Taster sind auf dem Spread-out Bord gesteckt, so das auch noch eine halbwegs freie Zuordnung zur Input-Nr. gemacht werden kann. Einschränkung dabei ist allerdings, das die Matrix-Bords immer 6 Eingänge mit gemeinsamem GND haben. 3 Pos- Schalter und Coolies dürfen deshalb nicht über die Block Grenzen gesteckt werden. Deswegen habe ich auch eine physikalische Trennung der 6er Blocks bei dem Spread-Out Bord.
-
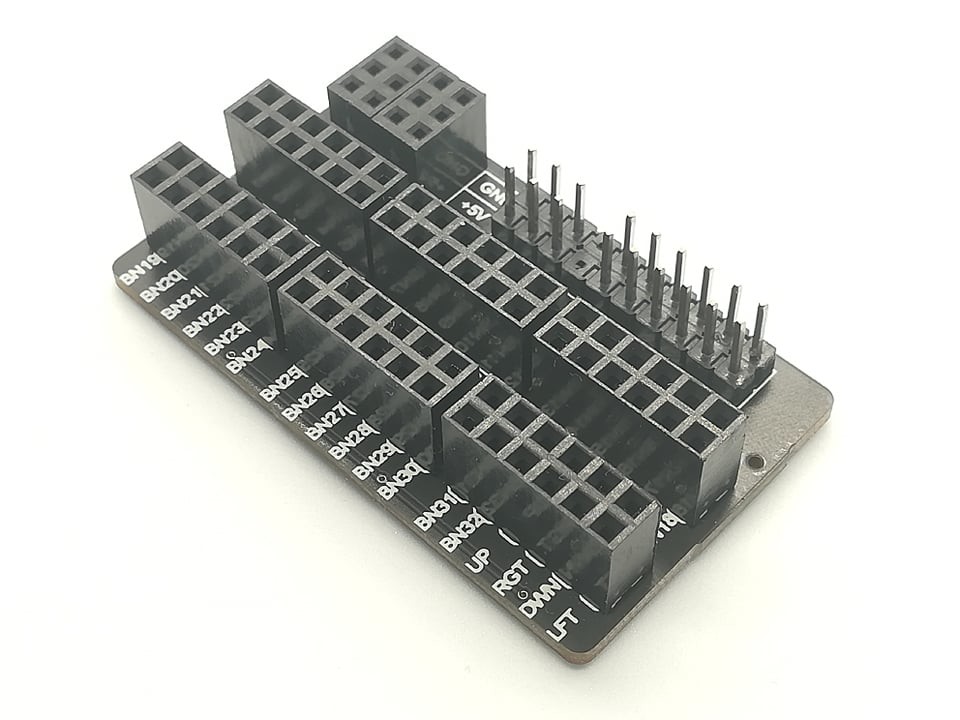
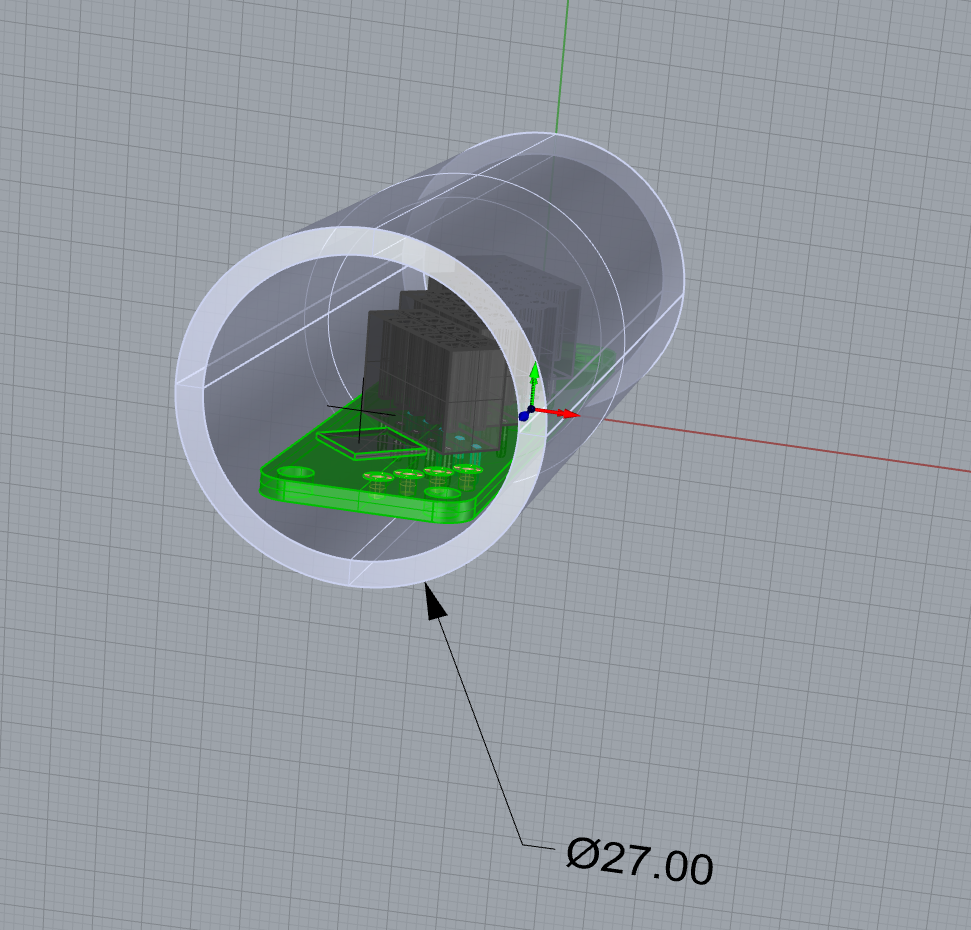
für die nächste Generation sind schon Controller in Planung, die im Griff sitzen und nur noch einen USB Stecker haben. Für die Cyclic soll der ins Rohrende oben passen und 20, 25 oder 36 Funktionen haben. der hat z.B. 20 Eingänge (4x5) Der Aussendurchmesser von 27 mm ist die Verkleidung, damit man das einfach in ein Alurohr schieben kann. Für die Collective dann bis zu 49. (Die Apache braucht 42 im Griff) Da ich gestern was von einer Begrenzung von 128 Eingängen bei DCS gelesen habe, mal ne Frage: gilt das insgesamt oder pro Controller? Hat das schon mal jemand mit großen Panels probiert?
-
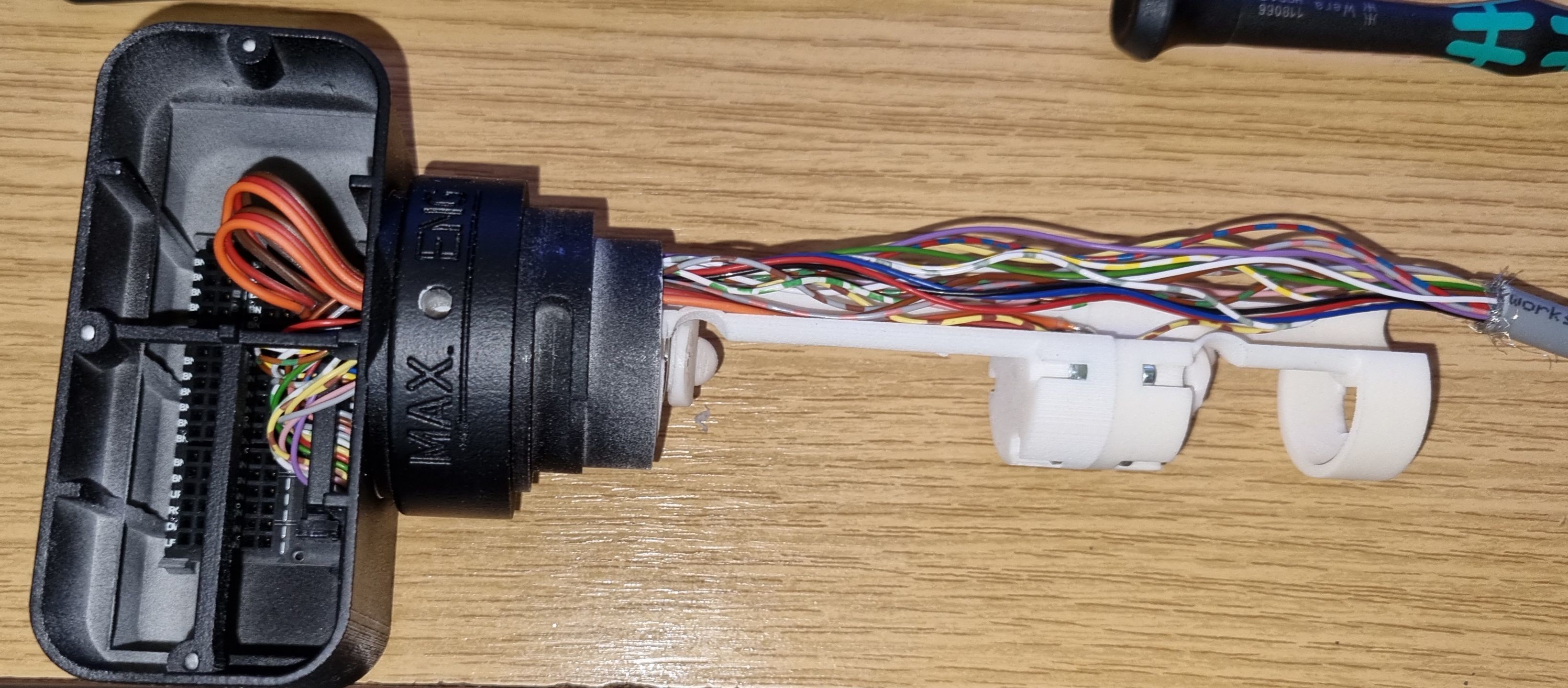
und so sieht es dann "am" Griff aus. das Rohr wird dann einfach drübergeschoben. Und für das Kabel ist unten bei der Mechanik eine Bohrung.
-
Das passt hat einen Aussen Ø von 26 mm und geht damit in ein 30er Alurohr mit 2 mm Wandstärke. Ein Magnet (Ø5mm x 3mm) im Griff (meine sind aus PA12 SLS gedruckt) zieht dann den gleichen Magnet auf dem Arm im Rohr mit. Die neue Gehäuseversion erlaubt sogar ein 18 adriges Kabel innen durch das Rohr zu führen, da die (blöden) modernen Helis die Kabelführung inszwischen innen haben. Das 18 adrige Kabel erlaubt dann 36 Funktionen und 4 Achsen am Griff. 2 Achsen wären dann für die Throttle und mit den 2 übrigen könnte man noch einen richtigen Daumenstick machen. Für die Apache zu wenig, da bekomme ich aber noch was passendes.
-
yap, 2x 270° ohne Schlitz im Rohr.
-
da scheint ja Kensington stark vertreten zu sein. Hab mir mal die 2 Tasten Orbit Kabelversion bestellt. Und hier wäre noch etwas für die "Selberbauer": aber ihr dürft die Funktion erstmal raten oder auch sagen.
-
Hi, ja der Orbit ist schon in der näheren Auswahl. Mit Kabel oder Wireless? Ich glaube, ich würde eine Kabelversion vorziehen.
-
Hi, seit gestern kann ich wenigstens wieder etwas Coptern. aber zum "Einsteigen" geht halt nur ein kurzes Brett rechts. Das Navi GNS430 wird noch ins Brett eingelassen. Trackball wäre geplant, da wo jetzt die Rift liegt.
-
Hi, mal ne andere Frage: wer benutzt Trackball statt Maus? Und hätte eventuell eine Empfehlung für eine links Version.
-
Hi, noch gar nicht. Könnte mir aber eine Verbindung über eine Collective / Throttle Console vorstellen. dafür muss ich noch etwas knobeln. Bei dem Bild wär für eine gute Bedienung die linke Armauflage schon im Weg. Soll ja "schnell" entfernbar sein, dabei aber trotzdem stabil. Und für jeden baubar, der ein bisschen Geschick hat. Wie machen es denn die "Bürostuhl-Piloten" bis jetzt? Mich würde es nerven, wenn sich da alles bewegen kann.
-
nö, ich hab da so ein Universal Litiumseifenfett ( 1kg Dose aus dem Baumarkt, vor min. 15 Jahren gekauft). Das reicht völlig. Da muss auch nix kugelgelagertes hin, die Potis sind ja meist nur langsam und mit kleinen Winkeln unterwegs. Nach dem Drucken etwas mit Schmirgelpapier die Stufen weg machen und ein bisschen Fett dran. Wie gesagt das läuft beim Kumpel im Flugsim seit etwas über einem Jahr so.
-
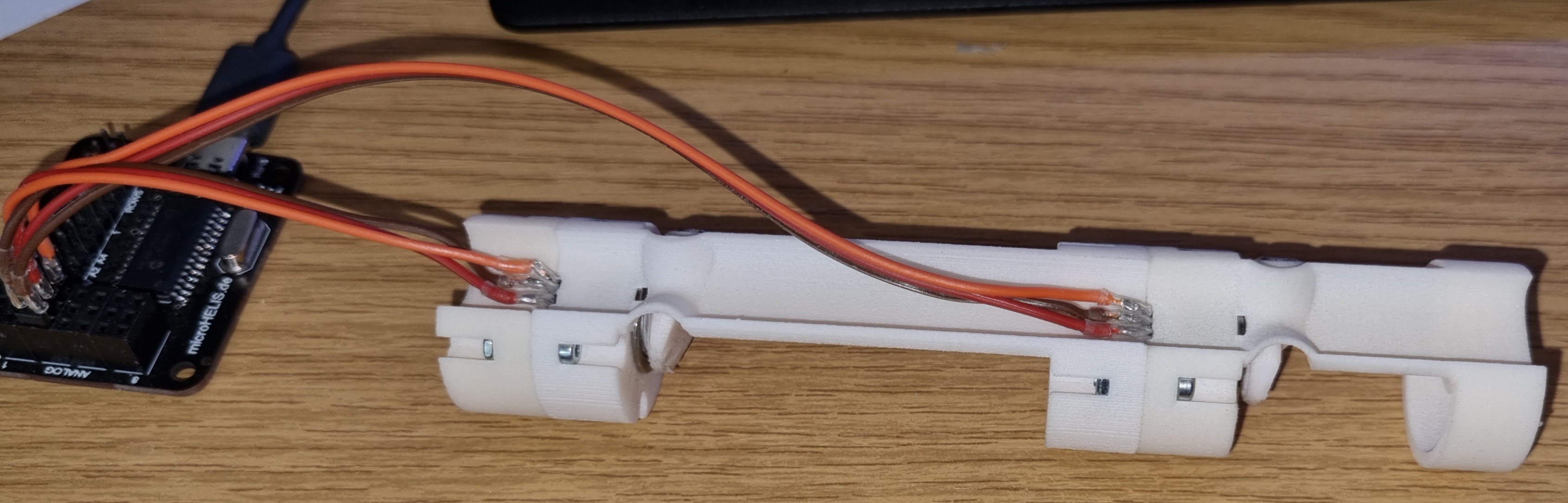
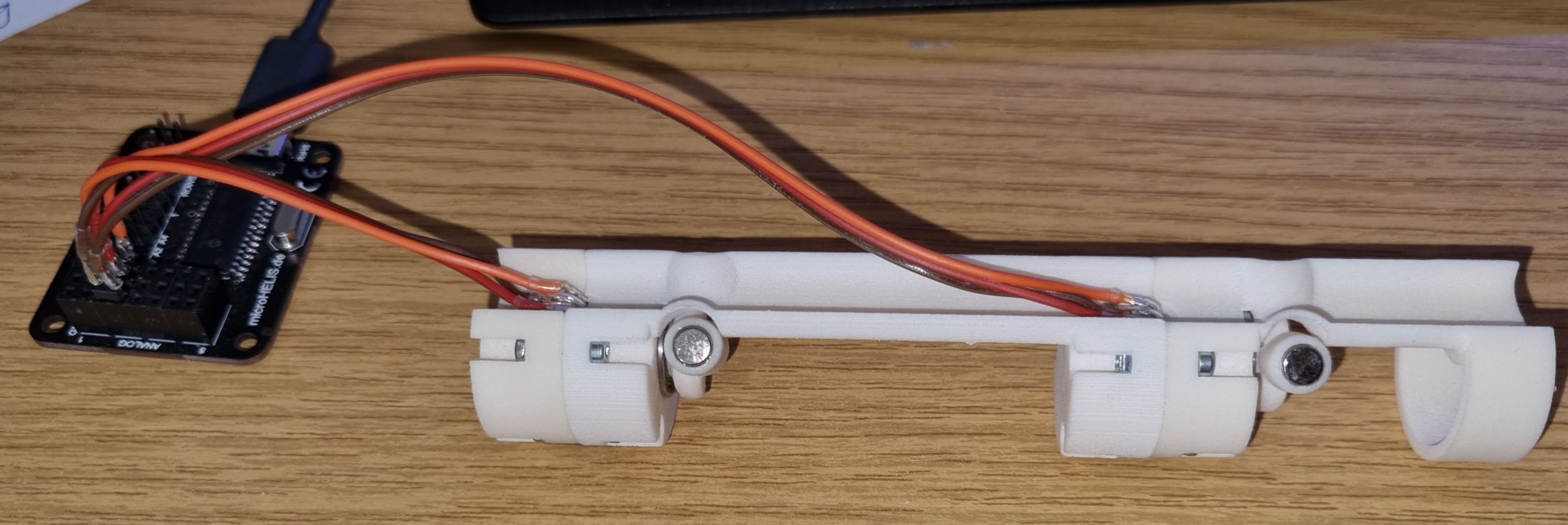
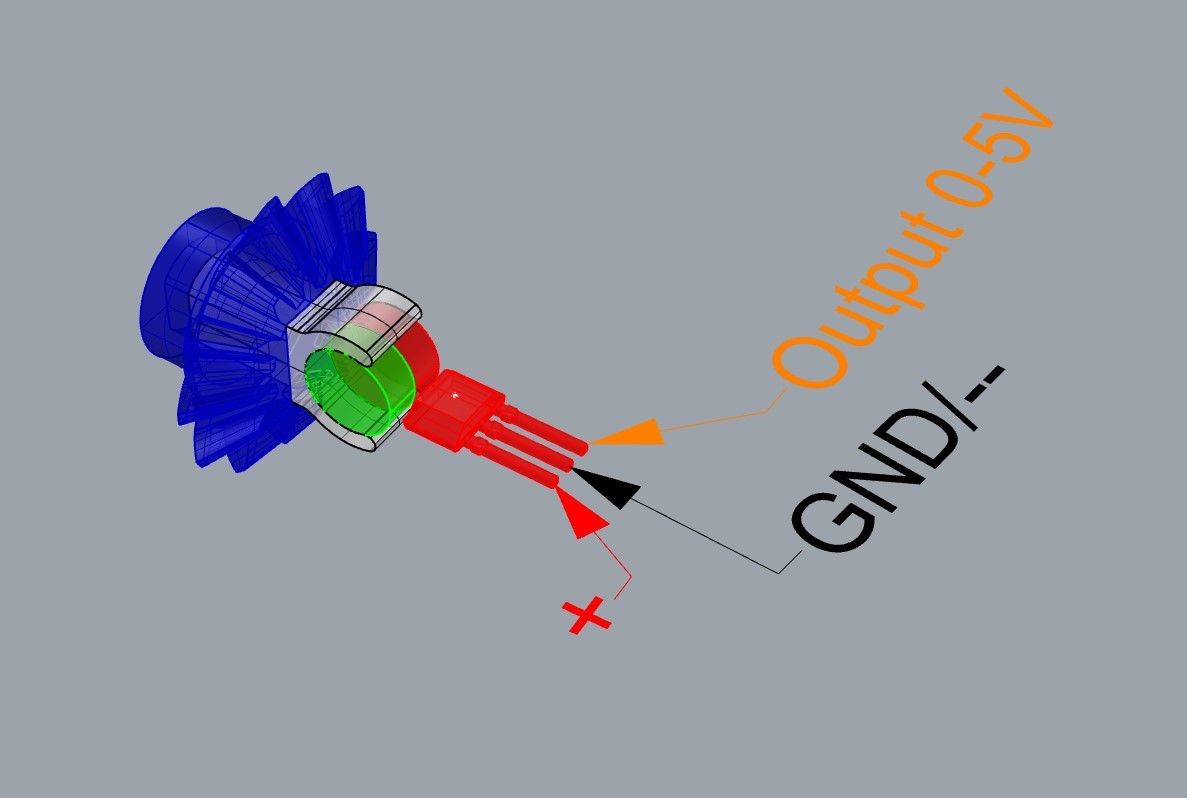
yap, kann man schon "einiges" mit machen und so sieht das mit Magnet und Hall-Sensor aus.
-
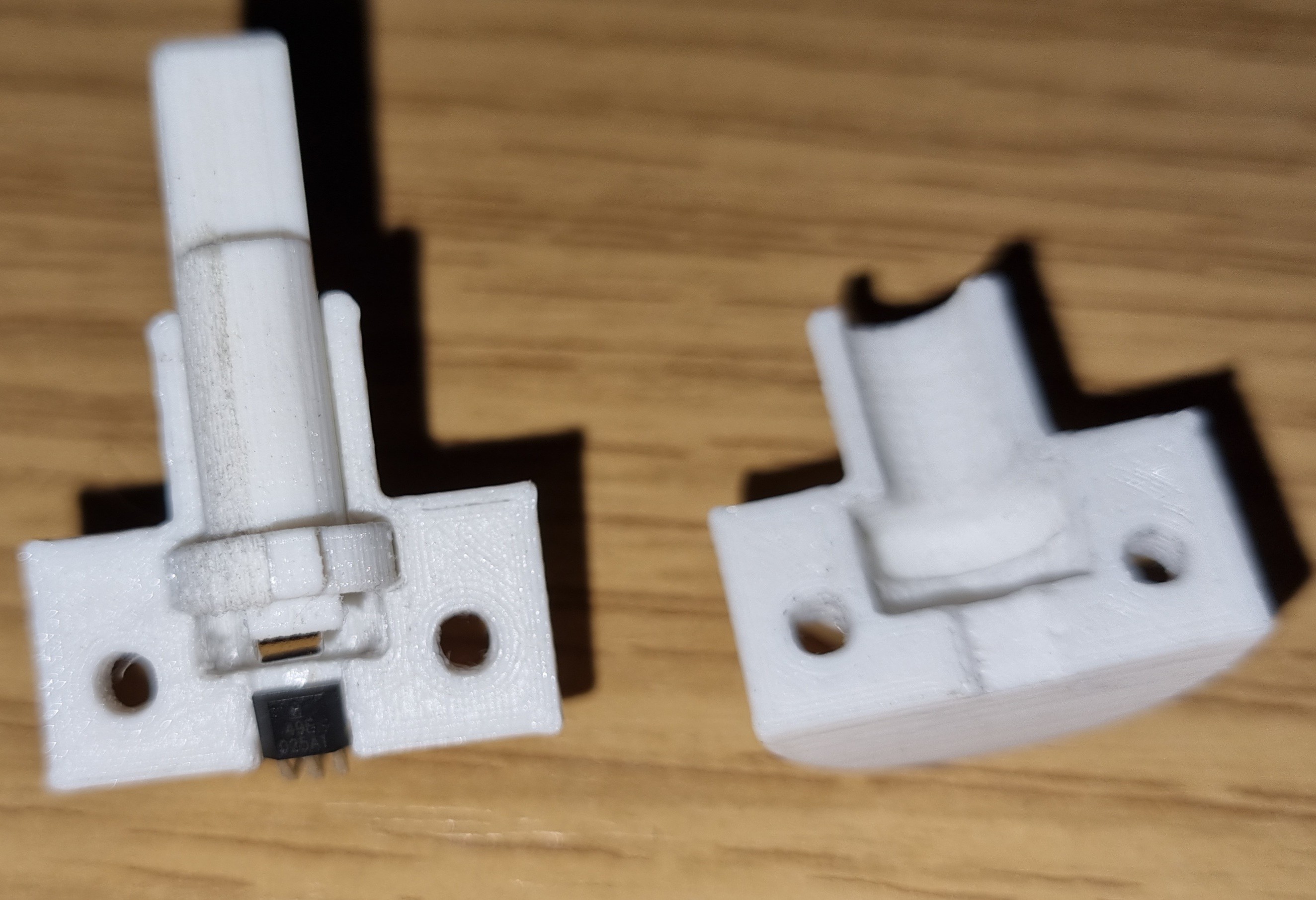
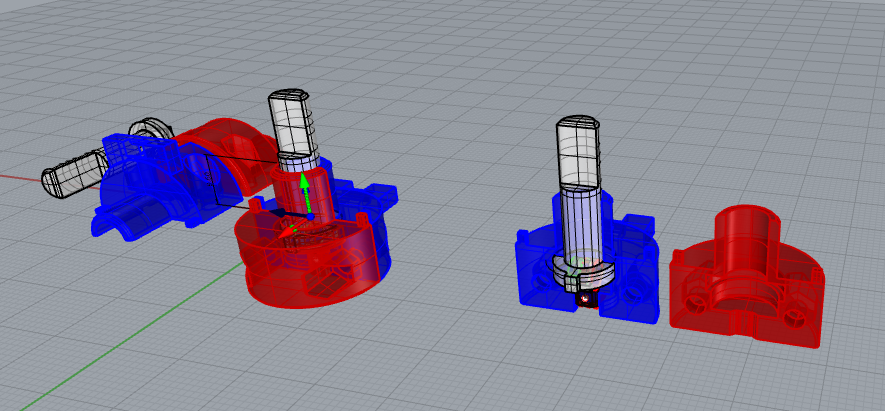
ältere Poti basierende Achsen können mit relativ wenig Aufwand auf Hallgeber umgebaut werden. das ist eine Hall-Sensor Position, die ich immer in meinen Controls verwende. Der Hall-Sensor detektiert dabei die Drehung der N-S Achse des Scheibenmagneten. Und statt die Magneten im Bogen um den Sensor zu schwenken, hat sich diese Lage für mich am effektivsten gezeigt. Damit kann ich dann eine sinnvolle Achsdrehung von fast 150° an den Controller geben. Bei 180° wechselt die Drehrichtung für den Sensor und deshalb ist der Bereich von 0-15° und von 165-180° nicht wirklich brauchbar. Da sind die Werte für eine genaue Position zu klein. Die meisten (bezahlbaren) Hall-Sensoren haben eine interne Auflösung von 10 Bit, weswegen (meiner Meinung nach) eine 16 Bit Weiterberechnung an den PC nie wirklich zu einer Verbesserung führen kann. Wenn man aber den mechainscehn Bereich passend mit einem Getriebe übersetzt, kann man auch mit 10 Bit z.B. an den Pedalen eine Auflösung von ca.0,1mm erzeugen. Jetzt aber zum Poti: Poti aus einem alten CH-Flight Yoke mit Joystick Anschluss vermessen und im CAD nachgebaut. ein bisschen mit den "Spaltmaßen" gespielt und aus PLA gedruckt. Der Ø5x5 mm Neodym-Magnet wird in die Achse geklemmt und der Sensor verkabelt. Die Lötlaschen vom Poti sind dann halt weg, aber man muss beim Sensor ja auch auf die Polung achten. Drehrichtung umkehren wie beim Original-Poti führt unweigerlich zum "magic dust". (Wenn der entweicht ist die Elektronik hin) Die so modifizierten Potis laufen jetzt über 1 Jahr problemlos.
-
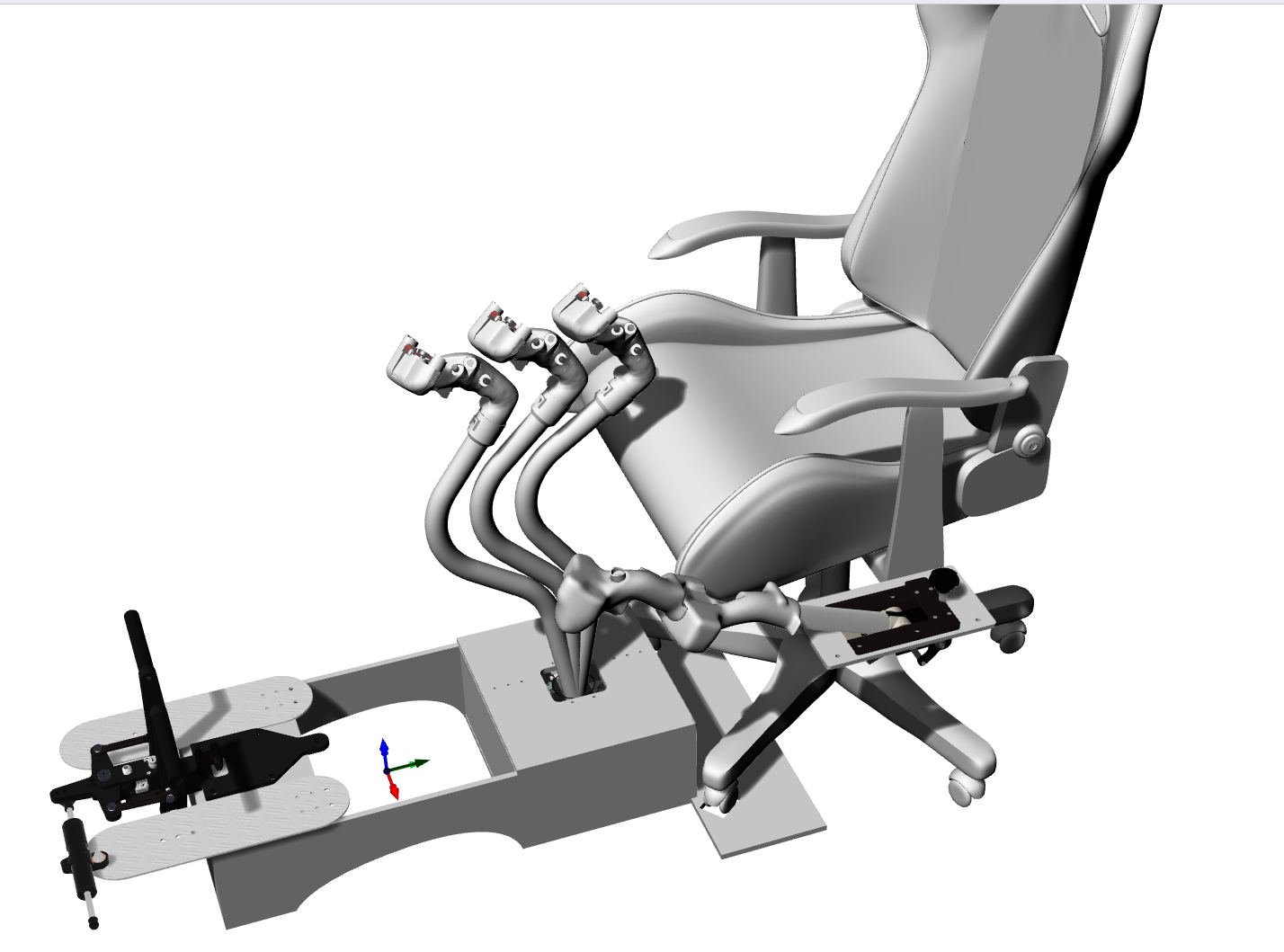
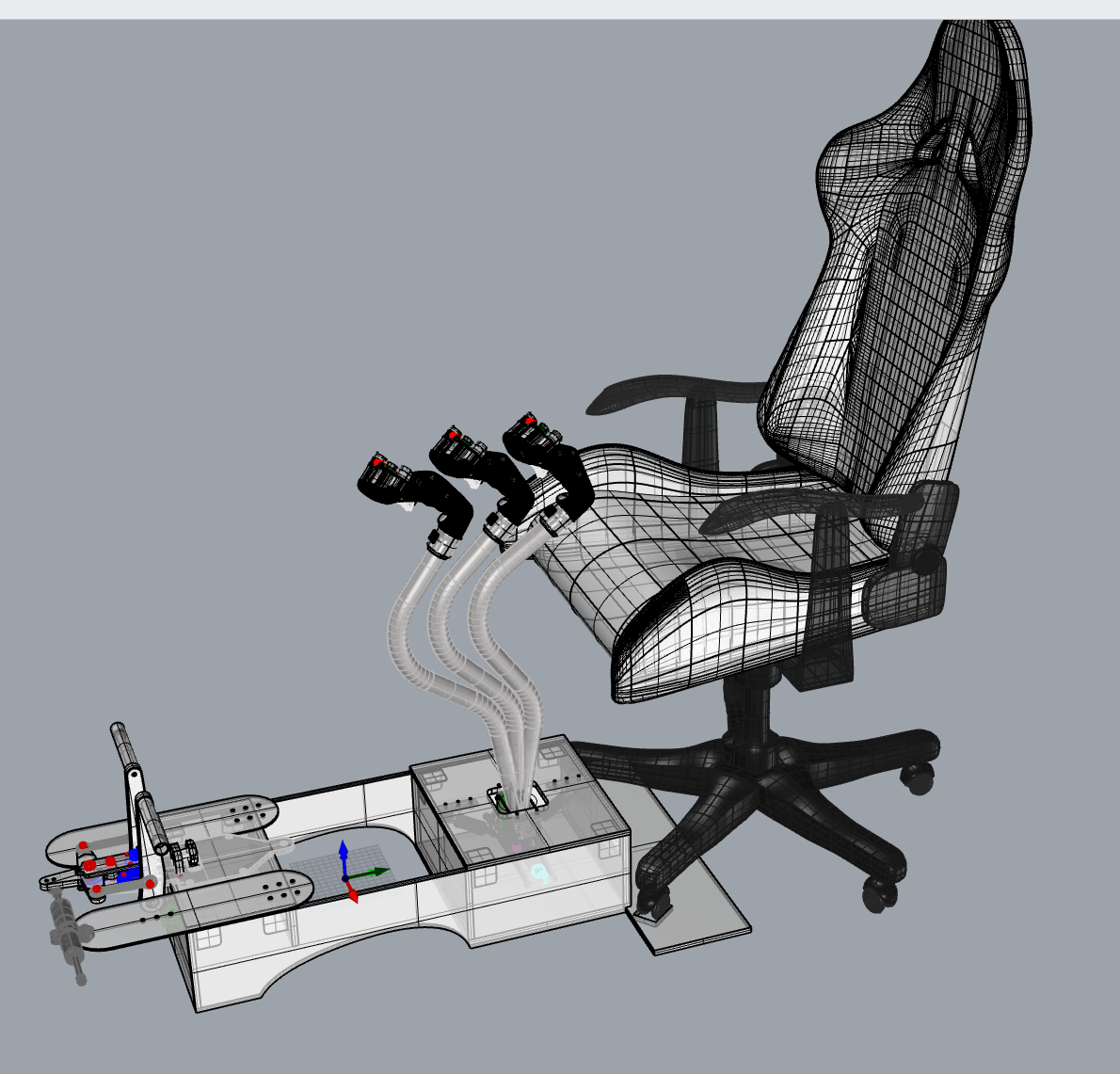
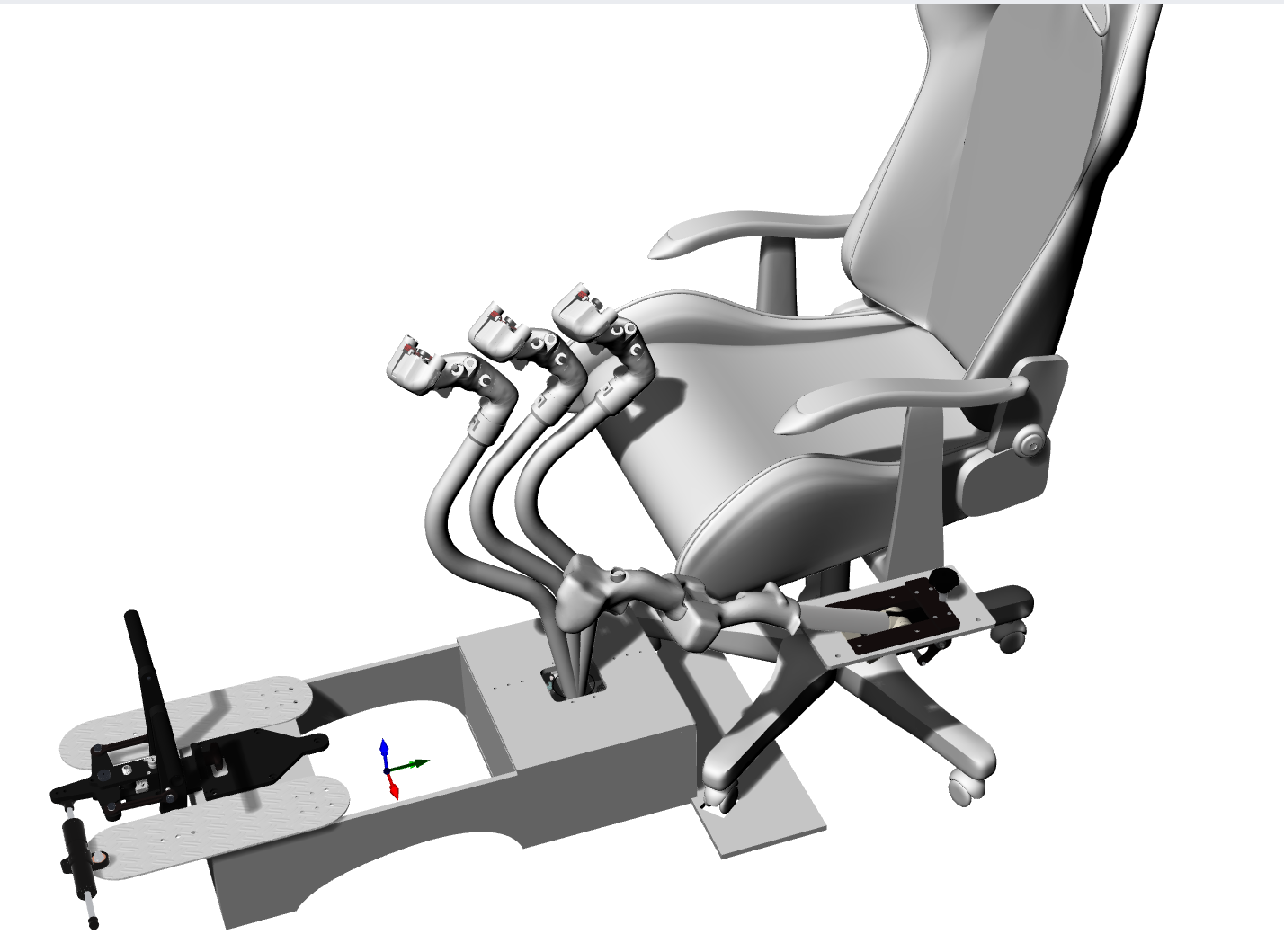
mache ich doch direkt den Anfang. persönlich ziehe ich inszwischen einen kompletten Rahmen mit festem Anbau der Controls der "Bürostuhl" Lösung vor. Aber ich habe zufällig auch den Platz dazu. Da es aber noch "genug" Schreibtisch Flieger gibt habe ich letztens für einen Kunden eine Lösung zum selberbauen ausgearbeitet, die zumindest schon mal den Stuhl relativ zu dem Cyclic und den Pedalen fixiert. Es ist nämlich ätzend, wenn beim Steuern der Stuhl abhaut. Da mache ich noch einen Anbau für den collective dran.
-
Hi, vielleicht ist ja doch Bedarf für einen Thread, wo es um Technik geht. Und zwar nur um Technik! Hier möchte ich keine Diskussion über wer warum welche Typen bauen möchte. Das ist nämlich völlig egal. Hier wären Beiträge schön, die anderen und auch mir Probleme und Lösungen zur Bedienung (von welchen Fluggeräten auch immer) aufzeigen. Probleme sind zum Lösen da und Lösungen kann man teilen. Einige werden mich vielleicht schon kennen, aber für die anderen kurz: seit Mitte der 80er mache ich Maschinenbau und EDV. Und seit Anfang der 70er mit großen Unterbrechungen Modellbau. (Hab also ein paar Jährchen Problemlösung auf dem Buckel) Seit 2014 entwickele ich Heli-Control-Repliken, für die ich auch eingene Mechniken entwickelt habe. Dabei habe ich mir halt auch einige Lösungen ausgedacht, die eventuell für andere als Anregung dienen könnten. Da ich hier keine Werbung für meine Produkte machen möchte, werde ich Fragen nach Preisen und Lieferbarkeit hier nicht beantworten. Falls aber ab und zu ein Bild meiner Teile zur Veranschaulichung benutzt wird, mögen die Moderatoren das bitte verzeihen. Gerne bin ich bereit mein Wissen zur Problemlösung zur Verfügung zu stellen. ( Aber keine Druckdateien für die Repliken, die sind normalerweise eine Höllenarbeit) In dem Sinne: Technik nix anderes. Konstruktive Kritik ohne das bisherige in Frage zu stellen hilft auch weiter. P.S. wer das nicht will oder kann, braucht das auch nicht hier kundtun. P.P.S. Applaus zu gelungenen Lösungen darf aber schon geäußert werden.
-
oder man hat ne Basis, wo Collectives einfach mit 2 M4 Schrauben und einem Mehrpolstecker wechselbar sind.
-
dann ist der 2. Griff aber sehr weit vorne. Und ob die Base für diese Hebellänge in der Bremse einstellbar ist? Aber alles Kristallkugel .......
-
aber ohne ein Modell, von dem man weiß, was es wirklich umsetzt, ist das ganze Kristallkugel lesen. dann muss man aber die base ohne Throttle nehmen.
-
Hi, zumindest beim Collective braucht er wohl keine mehr, der Griff passt wohl mit dem Zapfen auf die neue Base. Was da aber noch nicht hinhauen kann, sind die 41 Funktionen vom Griff auf eine Base bringen, die aktuell nur 32 kann. Da wird er noch einen Zusatz brauchen. Und mal sehen, ob er den Preis für den Collective überhaupt halten kann, die Druckdienstleister für SLS Druck haben ganz schön angezogen. Das ist schon ein Monsterdruckteil, wenn er es einteilig macht. Und die Verkabelung wird auch lustig.
-
ok, da hast Du wohl recht.