Vatikus
-
Posts
657 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Everything posted by Vatikus
-
The other day I was using CA to direct AI against my squadmates and I noticed that DCS actually has almost everything from the interface side to simulate in an acceptable manner the uplink from the GCI to the Russian fighters. Currently Mig and Su have realized half of the potential (system wise) and using radar is more laborious that it would been in typical Russian use as information we are feeding by hand now can be automatically set by the uplink from the GCI: - where should the center of the radar's antenna look at to find the target. Which gives spatial orientation for the pilot before even being able to detect/lock target himself. If we look at the screenshot: we can see that the way we order AI around, is pretty much how can GCI operator direct human pilot. Everything is in there... setting the parameters of: - speed - altitude - target (direct radar) - ROE If ED would use these developed interface to also enable sending info to the player and not just AI, we could pretty much end with a decent simulation of the Russian GCI doctrine and it would add quite a lot to simulation of Russian hardware.. and others which use similar system of datalink. We see every day that in MP human operated GCI/AWACS are getting steadily more use, adding such feature would make tactical game even more interesting and it would also upbring the value of CA module. .. at least IMHO :D

-
Also what defines "Heavy mission"?
-
However it should be also noted that there is a bug since forever for FFB & trim. If you add curve to the axis then trim will not put your stick into the right position. It's annoying as hell to use non-curved axis mapping. Walkaround for this is to use autopilot as much as possible.
-

Su-27 / Su-33 - HUD - Relative target altitude no numbers
Vatikus replied to Falcon_S's topic in Object Bugs
I've checked that indeed... the numbers you see in video for example are automatic feed of GCI. So for example.. GCI sets you the center of the zone (indicated by the distance number) and altitude information is above your altitude to set dH properly. The throttle is, as you have pointed yourself, manual distance after lock or when the radar is off to set the manual intercept. -
Su-27 / Su-33 - HUD - Relative target altitude no numbers
Vatikus replied to Falcon_S's topic in Object Bugs
it is a bug. In the picture below you can see the discrete steps you should be able to choose.
-
Lets make it page 100... new launches vs. F16 :D
-
You would lose the bet ;) .. even R23R missile had phase based monopulse head.
-
Resistance of Warthog-/Cougar-Stick?
Vatikus replied to Ragnar65's topic in PC Hardware and Related Software
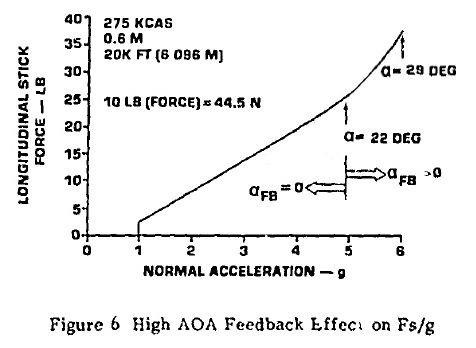
it is, it increases force gradient on stick when 22deg AoA is reached as a stall warning.
-
No.
-
DCS has wrong simulation, so procedure is different than the examples I have shown. In DCS, cursor moves on slant range instead of horizontal. So you need to use the following procedure: Key mappings for Expected range, the numbers show on lower part of HUD.. for example 90. Then you use key mappings for Antenna elevation.
-
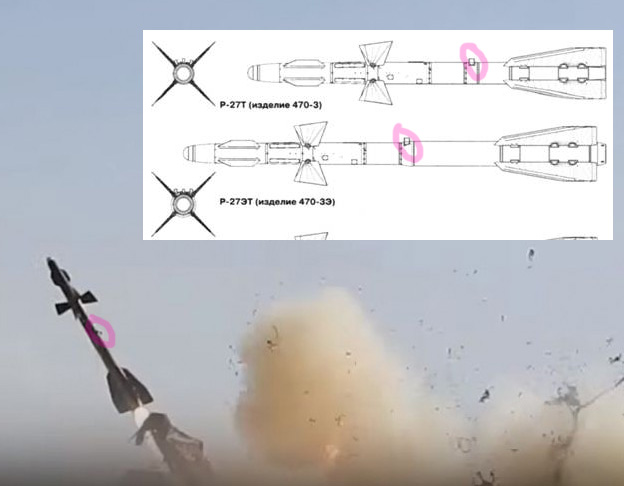
:D the missile in video is ET version as was established above by burn time and you can also confirm by the missile proportions and features.
-
-
I do not know Kunz with which version of Su27 this is implemented. I have only manuals with such details on weapon systems for Mig planes. Seeker might be too general, yes.. literal translation is that it has 2 photodetectors, one cooled, other not. It points that there is switch between the two when gas runs out. I think the problem rises because of the update rate commands being sent.
-
From the mig29 9.13 manual, the 27E(x) rocket burn time is specified as: 8,6-11 seconds. And when we look at the section of how to use them... the limitation of how to fire T/ET, it is noted that pilot should not launch a followup missile before 8s for ET and 6s for T, to avoid lock on the rocket engine. This information should help resolving the myth of which missile should been fired first ;) What might be also interesting is that ET has 2 seekers, a cooled one and uncooled. The uncooled is activated when cooling gas runs out. With uncooled seeker lock is only possible in the rear hemisphere. While the same manual says that SUV-29 wcs does not support this, the 27ER missile has this feature. It describes it as follows... 27ER is designed to work with halved PRF, which allows simultaneous deployment of two missiles on two targets. An interesting info is also that 27ER missile can tolarate breaks in illumination of 20-30% of the remaining time to intercept before being trashed. Last but not least, the way the INS updating is performed, if launching a/c exceeds angular speed of 60deg/s, it is not guaranteed that missile receives correct data. Manual notes that this can happen if pilot is performing barreling maneuvers for evading missiles. Cheers..
-
Su-27 and -33 shift HMS up from middle of screen?
Vatikus replied to Nightwolf's topic in Su-27 for DCS World
Nightwolf, indeed, the HMS implementation is a legacy from days when DCS was known as Flanker and center of the screen was center of the HUD. Most of us are having fingers crossed for a revision to FC3 avionics/systems after the Hornet is out... -
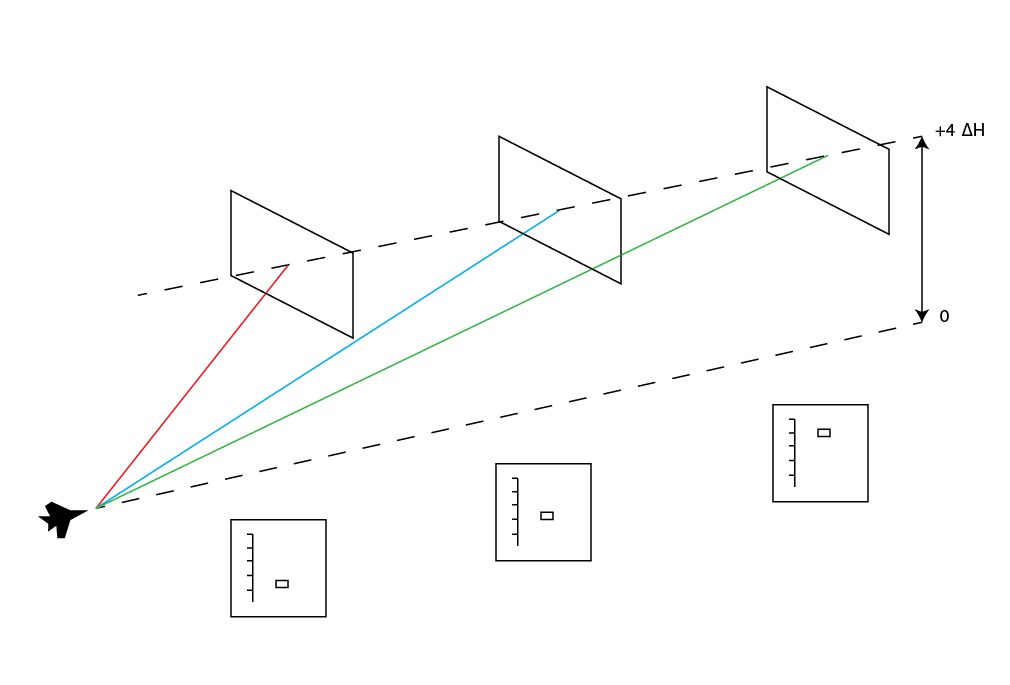
No, please reread carefully what it says... let me demonstrate with an image... as you can see, moving the cursor along the range, changes antenna angle! The roller you are mentioning is used to set distance to target locked when for example radar/eos cannot give it to you to get the PR signal. Imagine it like function of gunsight range on older analogue computing gunsights which was on throttles.
-
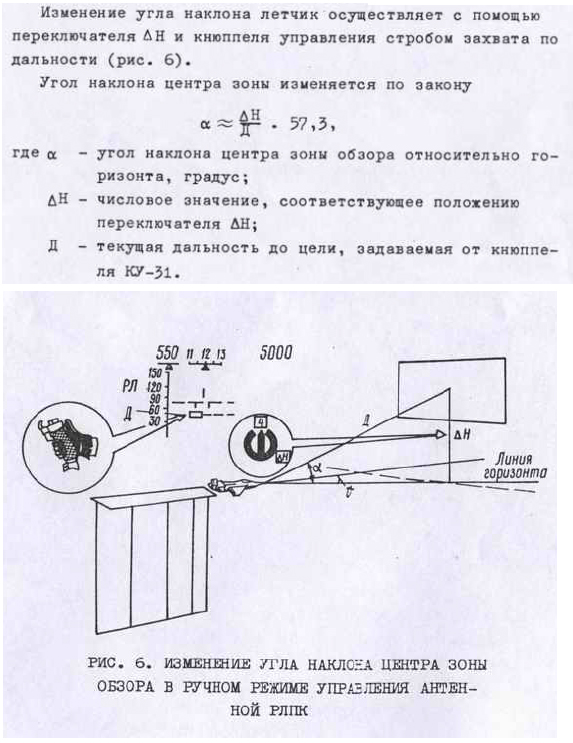
That is not how you set the radar zone. Image from the manual ... as you can read yourself, it says distance is set by cursor (also image of stick), while altitude offset by rotary knob ΔH. You can as well see how HUD looks... HUD repeater also shows the scan line, and graphical relationship of scan zone to horizon.
-
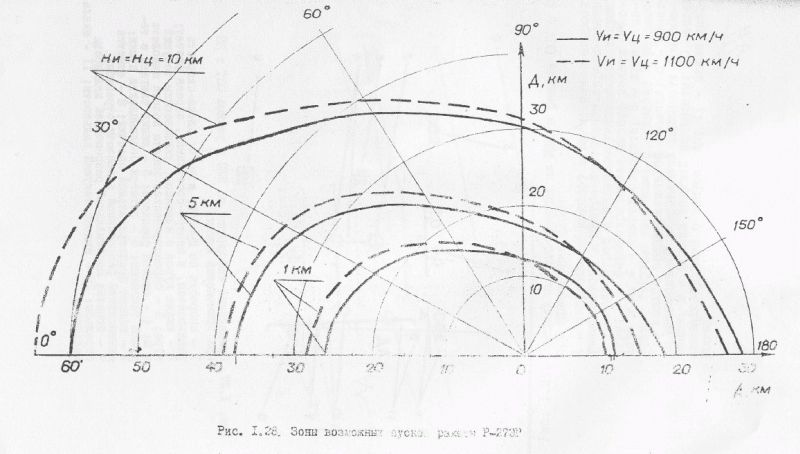
Mig29 9.13 manual states for example how much difference in altitude can be, for high Pk... if fighter is flying @5km, 900km/h(!) it can shot at target which @max. flying above him as follows: R27T - dH 5.5km into hot, 3km cold, R27ET - dH 13km into hot, 7.5km into cold target aspect. So if we go by ballpark... to include the fact of launch @GL with 0km/h.. cold aspect shots are your best fluke.
-
As Esac_mirmidon said, the real one does not show this number on the HUD. The vertical scan zone is set by rotary knob ΔH and you see the setting there. I would also say that Presing is right in a way that there is a bug with the numbers showing at all. However that being said... we should understand that DCS has completely fantasy HUD... For example if I only concentrate distance and vertical scanzone settings. As mentioned, vertical altitude displacement by the rotary knob, however the range is set in real life by where is cursor positioned (no seperate setting the imaginary numbers like DCS) and you actually have range numbers written on the scale.... ..I really hope we will see ASM someday..
-
related to (take it for what it is :) ) http://www.arabnews.com/node/1271216/saudi-arabia
-
Might well be the language barrier... I will try to rephrase. What I wanted to point out is that just force sensing alone does not equal in easier and more precise control. I gave the example how this process happened in real life and what is the result -> humans need positional feedback for force sensed controls to overcome the PIO, etc. Very good example, if you do not like F16, is Saitek X65F and early FSSB versions which ignored positional feedback and which made using such joysticks more frustrating than clasical designs. So the argument of throwing mechanical design completely out of the window does not work in practical sense. The end result for good pilot stick (real or gaming) is to include good displacement mechanics (to minimize all the flaws you had mentioned) and use good sensor tech for picking - either be it displacement or force related.
-
^^^ to add... ie problem of fixed stick was also tendency to add unintentional roll command when pulling
-
You will need to use 3rd party software to rotate the display
-
I was referring to the real thing to show that theory of yours does not hold in real life. F16 is a very nice example of how such hypothesis (it had fixed stick on its birth) was proven wrong, and why force sensing alone (while being very accurate sensor) does not work well with human operator when it comes to flying an aircraft. That is obvious... however the greatest difference is that in real life, the force you have on max deflection on your BRD/VKB/Virpil, etc. is just a breakout force to start moving the real stick :)
-
Why F16, etc. use force sensors has only a little to do with what you had said. The main reason to use force sensor is when you have too small to be practicable positional displacement. We, humans, are not as good at judging force applied as position and this is the reason why F16 got that small movement and why all plane sticks which use force sensors have positional feedback and also the main reason why Saitek joystick failed so badly. And.. the breakout force in mechanical pilot stick is not the byproduct of being less optimal design but is actually the design choice to help minimize PIO, and indeed is also a feature of a real F16 stick... Overall, I would strongly suggest you to read some paper on the control and artificial feel design for aircraft. Plenty of very good free material is available on the net.