jaylw314
-
Posts
1058 -
Joined
-
Last visited
1 Follower
-
As a funny aside, it also depends on where you're looking. Your FOV is significantly affected by where you're looking, your pupil translates almost a centimeter when looking left vs right. Fairly significant when the lens is almost up against your eyeball. In my headset, I can see the gap clearly when looking straight ahead, but if I look at it with either eye, it's suddenly outside my FOV and I couldn't see it, which made me think I was imagining it initially
-
-
The justification was that the probe is above the aircraft centerline, so rolling will move it horizontally and vertically. I'm not sure I buy that argument, because you're only rolling at most 5-10 degrees. nobody is rolling 45 degrees during refueling
-
Curves are fine, unless you have a massive stick extension, or plan to invest in a force feedback stick and fly warbirds/helicopters. The only tips I'd add -- - every move requires an almost immediate "unmove," especially with pitch and throttle. If you're low, pitch up a bit, then immediately pitch back down. If you're forwards, back off the throttle a bit, then immediately push it back up. Never hold an input for longer than a moment. - decide at the beginning whether you want to use rudder or roll for lateral control. Apparently, in the Hornet, the official recommendation is to use the rudder, but I've always used roll and just can't do it with rudder.
-
Head position is recorded to some degree. If you save a track and replay it on flat screen, you'll see the view move around to follow your head movements, at least until you change views. So tracks are not irrelevant.
-
cannot repoduce and missing track file No lock with Maverick
jaylw314 replied to NoJoy's topic in DCS: A-10C II Tank Killer
I'll be the annoying one and ask if you're remembering to make the MAV page SOI before pressing TMS Up? -
In real life how do Apache pilots roll or Immelman the helicopter
jaylw314 replied to DmitriKozlowsky's topic in DCS: AH-64D
Literally unplayable /s -
How to perform overhead break pattern in a crosswind?
jaylw314 replied to Supernova-III's topic in DCS: F/A-18C
The wind had only a little to do with it. At ~150 knots on downwind, an 8 knot direct crosswind requires only a 3 deg wind correction angle. That makes a difference for big holding patterns, but for a fast plane in a small overhead break it's a small factor. A Cessna 150 in a 20 knot crosswind, though... FWIW, 1 nm sounds a bit too tight. -
Reality check--you're not sitting on the carrier deck, are you??
-
reported Countermeasures dispenses all chaff flares
jaylw314 replied to chuckd's topic in Bugs and Problems
And I noticed that when changing programs, pressing STEP sometimes but not always skips from program 6 to program 2 -
Quad Views ALWAYS renders the peripheral (low resolution) view on the desktop mirror. The whole reason it helps is by only rendering a small portion of the focus area. Since it never rendered the whole FOV in focus resolution, there's no mirror to display. What may have changed is that Pimax Play may have changed the Quad Views settings of Balanced, Performance and Quality. We don't have granular control of those, nor can we even see what they are. FWIW, as an alternative, mbucchia's QVFR layer still works, and you can still customize the resolution settings with it. Keeping the peripheral resolution above 40% or so is usually okay for recording or streaming
-
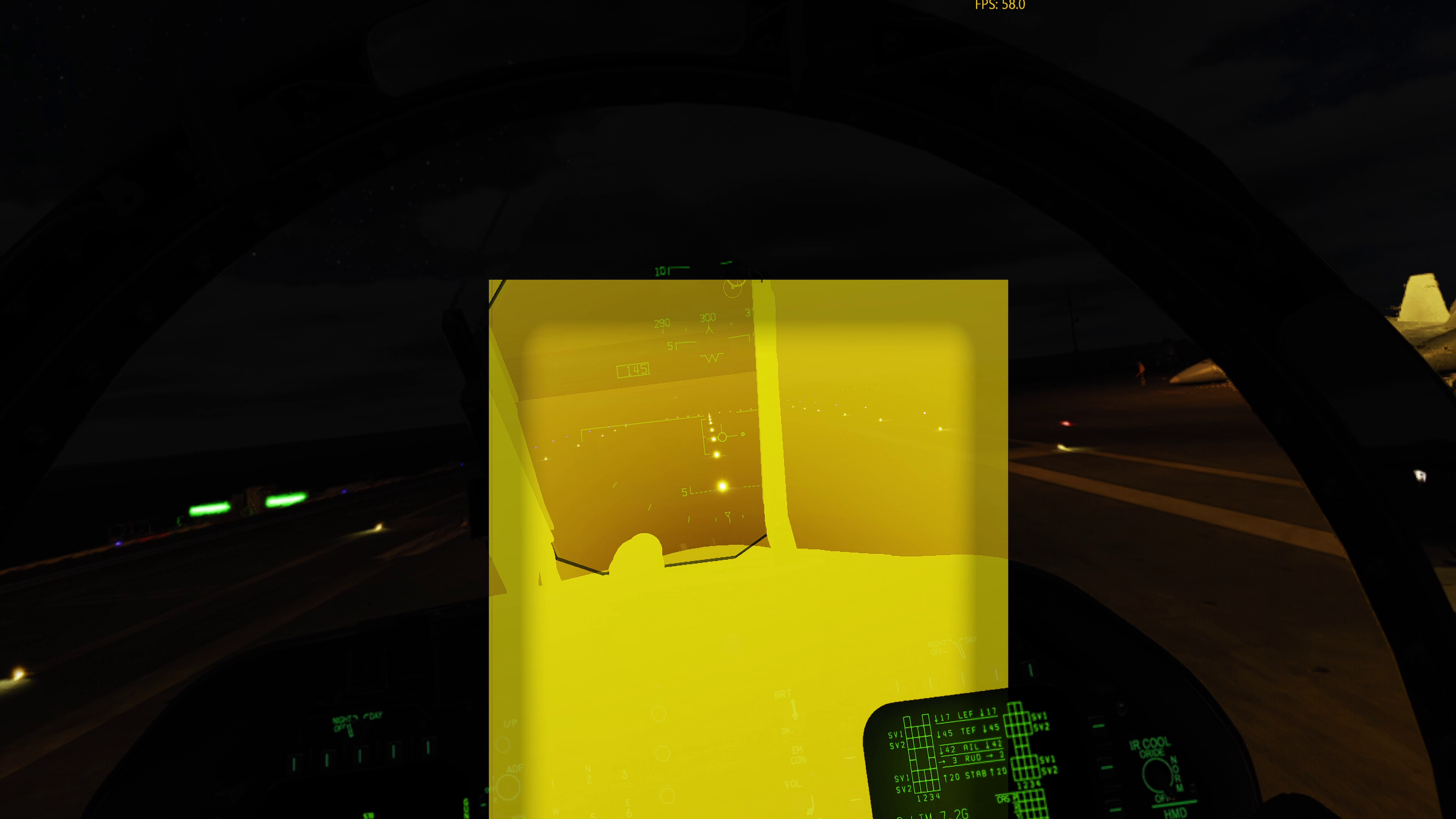
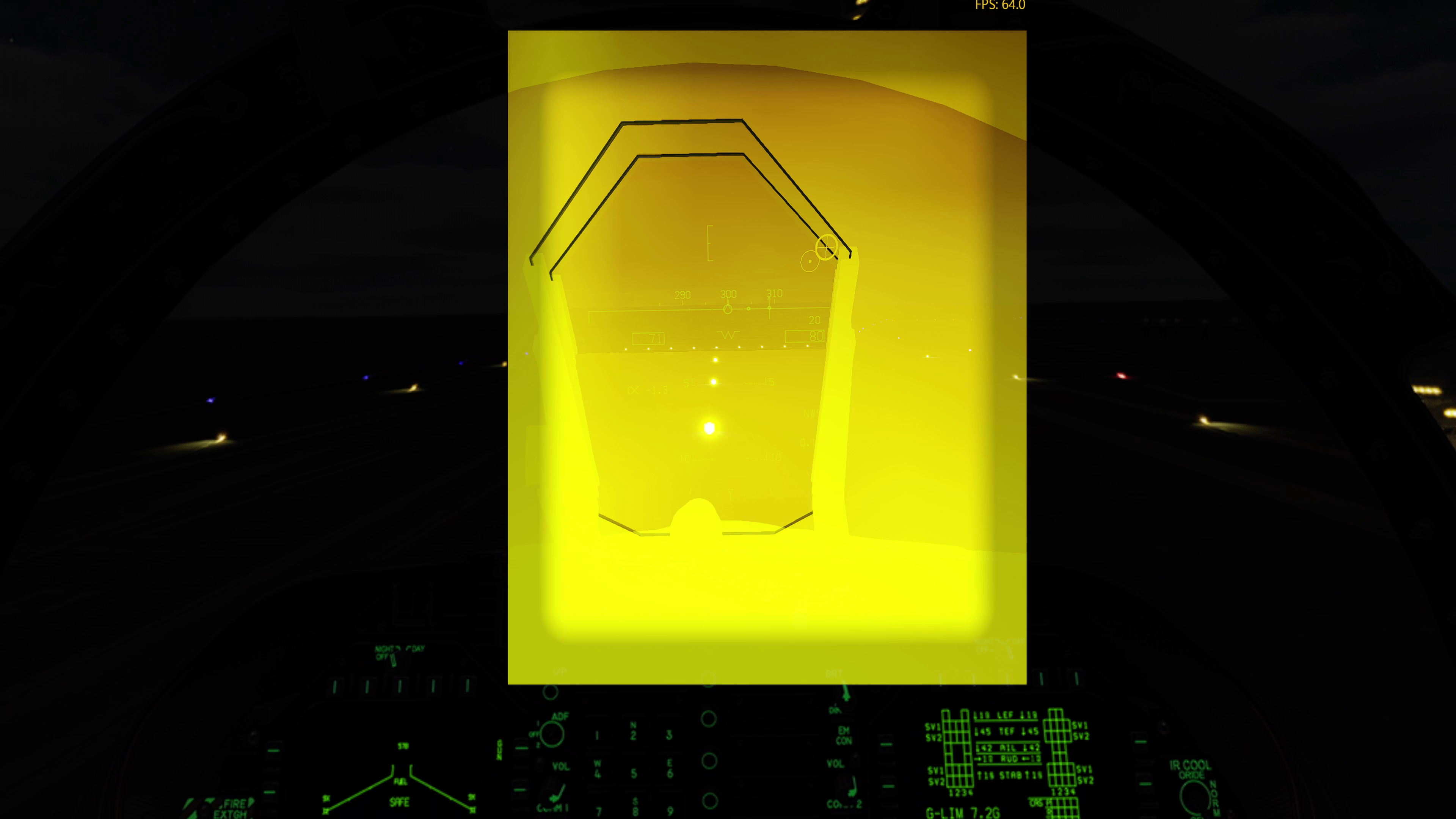
Thanks for the links, I reviewed them and they seem to refer to lighting when looking AT the environment, and it seems limited to only certain lights. AFAIK this is the first report I can find of this happening due to being NEAR a light. Granted, at it's root, it may be the same bug , but it's hard to imagine people would not have noticed blinding light doing hornet case III's before. I figured it was worth documenting the video evidence. As noted above, lens effects and other settings are off.
-
Do you have a link to specifics? I searched for a while and couldn't find anything specific
-
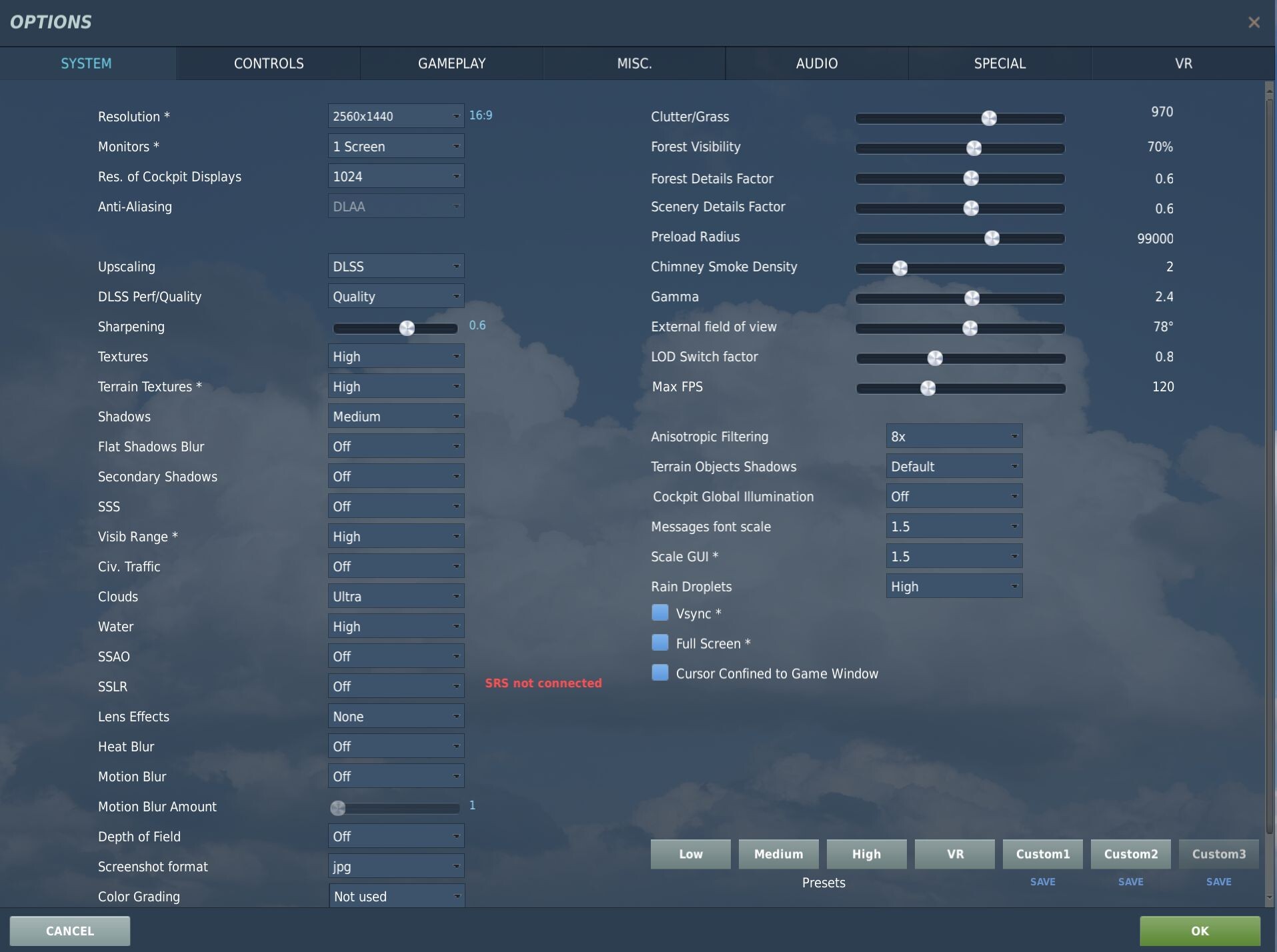
I tried searching to see if this has been a previous report. There were a couple references to this lighting issue, but minimal screenshots, no video and no tracks, so I'll file this as a new report. I noticed this while starting to work on night carrier landings. On the Supercarrier, if your eye position is within about 20 feet of one of the centerline lights, the light blooms in the focus area. This causes blinding flashing in the focus area as you run over the centerline lights in succession. Hardware - Ryzen 5800X3D, RTX 4080, Pimax Crystal Layers - PimaxXR, mbucchia's QVFR, recorded with the OpenXR mirror OBS plugin. Note that this configuration is required for videos and screenshots of the composited Quad Views rendering in the headset. The desktop mirror does not show the focus rendered areas. It's worth noting that I did see the same bug using Pimax's native OpenXR and Quad Views implementation, but the OBS plugin does not work so there is no way to obtain video and screenshots, but my experience was identical DCS - Stock F/A-18C Hornet Supercarrier Case III Landing mission. Lens Bloom, Global Cockpit Illumination, Volumetric lights, SSAO, etc all turned off (see screenshots) Video: jump to 25:18 Screenshots: Track: OpenXR Quad Views bug.trk Edit: Be aware that the track replay will not have proper player-to-AI ATC comms, since I use VAICOM. Also note that the mouse will be tied to the upper left corner since I use PointCTRL.

-
I don't know about numbers, but I went to school around NAS Miramar in the 80's, and those Hornets did a TON of training there. We had to stop classes every 15 minutes or so because of the noise from Hornets and Tomcats presumably doing pattern work. At least those Hornets got a lot of landings there, although a lot of them were probably A models.