Bog9y
-
Posts
586 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Bog9y
-
Hi guys, Just wondering, does anybody have a syllabus guide for the A-10 B course? ie, something that lays out all the training missions? I'm NOT asking for any classified stuff or tactics, merely a list of what gets covered on the training flights during conversion onto the jet. There is a real world document available for the AV8B training syllabus with very detailed information about ALL the simulator sessions, all the real training flights and a big section with tips and tricks how to operate the jet. This is in addition to all the NATOPS manuals. Needless to say this is amazing. I have also been able to find an old document detailing the syllabus for the F-16 B course. The Basic Employment Manual is also contains a lot of fantastic unclassified information. So I was curious, with the A-10 module being so detailed and most complete. Is anybody aware of any document that shows what the training flights are like?
-
Hi guys, Is there any fuel planning software/app or excel sheet available that you know of? I have looked but didn't find any other than the one for the A10 and F18. I mainly looking for one for the AV8B but if there is one that I can modify accordingly that could be a workaround. What I'm looking for is something that will calculate how much fuel the jet will use for climb/cruise fuel use per mile (or any other method of calculating fuel use) and descent. Bingo, joker or tiger calculators would be cool too.
-
Hi guys, For the past few weeks I have been busy coding the LUA files whilst building my VR AV8B home cockpit. I have shared these with Razbam and hopefully they will implement them at some point. In case this doesn't happen I would like to share these with you. I am not an expert coder by any means, so it may not be perfect but it works. The main additions are for the joystick lua file but add the coding to the keyboard lua file if you wish to use keyboard key combinations for a switch position (mainly OFF positions). I use RS Mapper to enable a switch to function in the OFF position. For example, a 2 way stich has an ON and OFF position. In DCS you can only trigger an instruction in the ON position. With RS Mapper I have assigned a keyboard command to when the switch is moved to the OFF position. This keyboard command effectively gives me 2 inputs with 1 switch. The POKEYS software can also code this if you are making a home cockpit with one of their cards. So, in general I have not added keyboard coding for every switch/button, but usually they would have the option to assign a keyboard command for the OFF position (or the center position if it's a 3 position switch). The only knob I can not get coded correctly is the BINGO fuel one, if anybody has this coded please share. So here is what I have done to the lua file: The first section is JOYSTICK SWITCH ABSTRACTIONS: I added this to enable the Antiskid test function to also work and switch back to ON. {down = fcs_commands.Switch_ANTISKID, up = fcs_commands.Switch_ANTISKID, cockpit_device_id=devices.FLIGHTCONTROLS, value_down=1.0, value_up=0.5, name = _('Anti-Skid TEST else ON'), category = _('Joystick Switch Abstractions')}, I added these for the FLAP POWER SWITCH & the LANDING LIGHT SWITCH: {down = fcs_commands.Handle_PARKING_BRAKE, up = fcs_commands.Handle_PARKING_BRAKE, cockpit_device_id=devices.FLIGHTCONTROLS, value_down=1.0, value_up=0.0, name = _('Parking Brake Lever OFF else ON'), category = _('Joystick Switch Abstractions')}, {down = fcs_commands.Switch_FLAP_PWR, up = fcs_commands.Switch_FLAP_RESET, cockpit_device_id=devices.VREST, value_down=1.0, value_up=0.5, name = _('Flaps Power RESET else ON'), category = _('Joystick Switch Abstractions')}, {down = fcs_commands.Switch_FLAP_PWR, up = fcs_commands.Switch_FLAP_PWR, cockpit_device_id=devices.VREST, value_down=0.0, value_up=0.5, name = _('Flaps Power OFF else ON'), category = _('Joystick Switch Abstractions')}, {down = ext_light_commands.Switch_LANDING_LT, up = ext_light_commands.Switch_LANDING_LT, cockpit_device_id = devices.LTEXT, value_down = 1,0, value_up=0.5, name = _('Landing Light APP else HVR'), category = _('Joystick Switch Abstractions')}, {down = ext_light_commands.Switch_LANDING_LT, up = ext_light_commands.Switch_LANDING_LT, cockpit_device_id = devices.LTEXT, value_down = 0,0, value_up=0.5, name = _('Landing Light OFF else HVR'), category = _('Joystick Switch Abstractions')}, MASTER MODES - NO CHANGE HUD CONTROLS - NO CHANGE VSTOL CONTROLS: Added this to enable FLAP BIT BUTTON: {down = fcs_commands.Button_FLAP_BIT, up = fcs_commands.Button_FLAP_BIT, cockpit_device_id = devices.VREST, value_down = 1.0, value_up = 0.0, name = _('Flaps BIT Button'), category = _('VSTOL Controls')}, FLIGHT CONTROL - NO CHANGE SAAHS - NO CHANGE -- Hydraulic & Mechanical Added these lines to enable keybinding for the canopy locking lever: {down = misc_commands.canopy_lock_lever, up = misc_commands.canopy_lock_lever, cockpit_device_id = devices.FLIGHTCONTROLS, value_down = 1, value_up = 0, name = _('CANOPY LOCKING LEVER toggle'), category = _('Hydraulic & Mechanical')}, Created a new category for the ECM panel and added these lines to be able to assign a rotary switch to the EXP and ECM knobs : -- ECM Control Panel {down = rwr_commands.Knob_EXP, cockpit_device_id = devices.EWS, value_down = 0.00, name = _('EXP Decoy Dispenser Control : OFF'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_EXP, cockpit_device_id = devices.EWS, value_down = 0.25, name = _('EXP Decoy Dispenser Control: AUTO'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_EXP, cockpit_device_id = devices.EWS, value_down = 0.50, name = _('EXP Decoy Dispenser Control: UP'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_EXP, cockpit_device_id = devices.EWS, value_down = 0.75, name = _('EXP Decoy Dispenser Control: DOWN'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_EXP, cockpit_device_id = devices.EWS, value_down = 1.00, name = _('EXP Decoy Dispenser Control: RWR'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_ECM, cockpit_device_id = devices.EWS, value_down = 0.00, name = _('Jammer Control Mode: OFF'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_ECM, cockpit_device_id = devices.EWS, value_down = 0.25, name = _('Jammer Control Mode: STBY'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_ECM, cockpit_device_id = devices.EWS, value_down = 0.50, name = _('Jammer Control Mode: BIT'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_ECM, cockpit_device_id = devices.EWS, value_down = 0.75, name = _('Jammer Control Mode: RCV'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_ECM, cockpit_device_id = devices.EWS, value_down = 1.00, name = _('Jammer Control Mode: RPT'), category = _('ECM Control panel')}, ENGINE & FUEL: Added this for the Fuel quantity indicator to be assigned to a 30 degree rotary switch. {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = 0.0, name = _('FQI: INT'), category = _('Engine & Fuel')}, {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = 0.33, name = _('FQI Mode: TOT'), category = _('Engine & Fuel')}, {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = 0.66, name = _('FQI Mode: FEED'), category = _('Engine & Fuel')}, {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = 0.99, name = _('FQI Mode: BIT'), category = _('Engine & Fuel')}, {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = -0.33, name = _('FQI Mode: WING'), category = _('Engine & Fuel')}, {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = -0.66, name = _('FQI Mode: INBD'), category = _('Engine & Fuel')}, {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = -0.99, name = _('FQI Mode: OUTBD'), category = _('Engine & Fuel')}, ECS: Added these lines to enable all the switches on the ECS panel. The TEMP controller dial is in the AXIS section. {down = ecs_commands.Switch_FWD_EQUIP, cockpit_device_id = devices.ECS, value_down = 0, name = _('Fwd Equipment Bay NORM'), category = _('Environmental Control')}, {down = ecs_commands.Switch_FWD_EQUIP, cockpit_device_id = devices.ECS, value_down = 0.5, name = _('Fwd Equipment Bay ECS Switch'), category = _('Environmental Control')}, {down = ecs_commands.Switch_FWD_EQUIP, cockpit_device_id = devices.ECS, value_down = 1, name = _('Fwd Equipment Bay RESET'), category = _('Environmental Control')}, {down = ecs_commands.Switch_AFT_EQUIP, cockpit_device_id = devices.ECS, value_down = 0, name = _('AFT Equipment Bay OFF'), category = _('Environmental Control')}, {down = ecs_commands.Switch_AFT_EQUIP, cockpit_device_id = devices.ECS, value_down = 0.5, name = _('AFT Equipment Bay ON'), category = _('Environmental Control')}, {down = ecs_commands.Switch_AFT_EQUIP, cockpit_device_id = devices.ECS, value_down = 1, name = _('AFT Equipment Bay RESET'), category = _('Environmental Control')}, {down = ecs_commands.Switch_CABIN, cockpit_device_id = devices.ECS, value_down = 1, name = _('CABIN DEFOG NORM'), category = _('Environmental Control')}, {down = ecs_commands.Switch_CABIN, cockpit_device_id = devices.ECS, value_down = 0.5, name = _('CABIN DEFOG'), category = _('Environmental Control')}, {down = ecs_commands.Switch_CABIN, cockpit_device_id = devices.ECS, value_down = 0, name = _('CABIN DEFOG MAX'), category = _('Environmental Control')}, {down = ecs_commands.Switch_PRESS, cockpit_device_id = devices.ECS, value_down = 1, name = _('PRESS NORM'), category = _('Environmental Control')}, {down = ecs_commands.Switch_PRESS, cockpit_device_id = devices.ECS, value_down = 0.5, name = _('PRESS DUMP'), category = _('Environmental Control')}, {down = ecs_commands.Switch_PRESS, cockpit_device_id = devices.ECS, value_down = 0, name = _('PRESS RAM'), category = _('Environmental Control')}, ELEC PANEL: Added DC TEST switch function: {down = elec_commands.Switch_DC_TEST, cockpit_device_id = devices.ELECTRIC, value_down = 1, name = _('DC Test Switch STBY'), category = _('Electrical Panel')}, {down = elec_commands.Switch_DC_TEST, cockpit_device_id = devices.ELECTRIC, value_down = 0.5, name = _('DC Test Switch OFF'), category = _('Electrical Panel')}, {down = elec_commands.Switch_DC_TEST, cockpit_device_id = devices.ELECTRIC, value_down = 0, name = _('DC Test Switch MAIN'), category = _('Electrical Panel')}, Pilot & Seat controls - NO CHANGE HOTAS - NO CHANGE LEFT & RIGHT MPCD - NO CHANGE -- ARMAMENT CONTROL PANEL Added the following lines to be able to assign a rotary switch to the manual bomb fuzing knob and the selective jettison control: {down = smc_commands.Knob_Bomb_Fuze, cockpit_device_id = devices.SMC, value_down = 0.0, name = _('WPN MAN CONTROL : NORM'), category = _('Armament Control')}, {down = smc_commands.Knob_Bomb_Fuze, cockpit_device_id = devices.SMC, value_down = 0.33, name = _('WPN MAN CONTROL : N/T'), category = _('Armament Control')}, {down = smc_commands.Knob_Bomb_Fuze, cockpit_device_id = devices.SMC, value_down = 0.66, name = _('WPN MAN CONTROL : N'), category = _('Armament Control')}, {down = smc_commands.Knob_Bomb_Fuze, cockpit_device_id = devices.SMC, value_down = 0.99, name = _('WPN MAN CONTROL : T'), category = _('Armament Control')}, {down = smc_commands.Knob_JETT, cockpit_device_id = devices.SMC, value_down = -1.0, name = _('Jettison Mode Selector : STA'), category = _('Armament Control')}, {down = smc_commands.Knob_JETT, cockpit_device_id = devices.SMC, value_down = -0.5, name = _('Jettison Mode Selector : STOR'), category = _('Armament Control')}, {down = smc_commands.Knob_JETT, cockpit_device_id = devices.SMC, value_down = 0.0, name = _('Jettison Mode Selector : SAFE'), category = _('Armament Control')}, {down = smc_commands.Knob_JETT, cockpit_device_id = devices.SMC, value_down = 0.5, name = _('Jettison Mode Selector : CMBT'), category = _('Armament Control')}, {down = smc_commands.Knob_JETT, cockpit_device_id = devices.SMC, value_down = 1.0, name = _('Jettison Mode Selector : FUEL'), category = _('Armament Control')}, UFC - NO CHANGE ODU - NO CHANGE COMMS - NO CHANGE MISC PANEL: I noticed that the Last 2 lines in this section is actually wrong, the name is "Mission Computer mode AUTO/OFF or OVRD/OFF". This in fact controls the DP switch. I have recoded this to be correct with these 3 lines: {down = misc_commands.Switch_MC_Power, cockpit_device_id = devices.MSC, value_down = 1.0, name = _('Mission Computer Mode OVRD'), category = _('Miscellaneous Controls')}, {down = misc_commands.Switch_MC_Power, cockpit_device_id = devices.MSC, value_down = 0.5, name = _('Mission Computer Mode AUTO'), category = _('Miscellaneous Controls')}, {down = misc_commands.Switch_MC_Power, cockpit_device_id = devices.MSC, value_down = 0.0, name = _('Mission Computer Mode OFF'), category = _('Miscellaneous Controls')}, I also added these Probe heat switch function: {down = misc_commands.Switch_PR_HT_Mode, cockpit_device_id = devices.FLIGHTINSTRUMENTS, value_down = 1.0, name = _('PRB HEAT HT'), category = _('Miscellaneous Controls')}, {down = misc_commands.Switch_PR_HT_Mode, cockpit_device_id = devices.FLIGHTINSTRUMENTS, value_down = 0.0, name = _('PRB HEAT AUTO'), category = _('Miscellaneous Controls')}, VRS output : {down = misc_commands.Switch_VRS_Output, cockpit_device_id = devices.NAVFLIR, value_down = 0.0, name = _('VRS DISPLAY SELECTOR MPCD'), category = _('Miscellaneous Controls')}, {down = misc_commands.Switch_VRS_Output, cockpit_device_id = devices.NAVFLIR, value_down = 1.0, name = _('VRS DISPLAY SELECTOR HUD'), category = _('Miscellaneous Controls')}, VRS mode: {down = misc_commands.Switch_VRS_Mode, cockpit_device_id = devices.NAVFLIR, value_down = 0.0, name = _('VRS MODE SWITCH AUTO'), category = _('Miscellaneous Controls')}, {down = misc_commands.Switch_VRS_Mode, cockpit_device_id = devices.NAVFLIR, value_down = 1.0, name = _('VRS MODE SWITCH RUN'), category = _('Miscellaneous Controls')}, NAV Panel: Replaced the first 2 lines for the course selector switch with these 2 lines, now the course selector switch works without a problem. I do have the center position mapped to a keyboard command with RS MAPPER: {down = inst_commands.Knob_Course, down = inst_commands.Knob_Course, cockpit_device_id = devices.NAV_INS, value_down = -0.5, value_up = 0, name = _('COURSE SELECTOR CCW'), category = _('Navigation Control')}, {down = inst_commands.Knob_Course, down = inst_commands.Knob_Course, cockpit_device_id = devices.NAV_INS, value_down = 0.5, value_up = 0, name = _('COURSE SELECTOR CW'), category = _('Navigation Control')}, -- IFF , I added this section so that we can control the IFF switch ZERO/NORM/HOLD as you would do as part of the after landing checklist. -- IFF {down = acnip_commands.Switch_IFF_CRYPTO, up = acnip_commands.Switch_IFF_CRYPTO, cockpit_device_id = devices.ACNIP, value_down = -0.5, value_up = 0, name = _('IFF HOLD/NORM'), category = _('IFF')}, {down = acnip_commands.Switch_IFF_CRYPTO, up = acnip_commands.Switch_IFF_CRYPTO, cockpit_device_id = devices.ACNIP, value_down = 0.5, value_up = 0, name = _('IFF ZERO/NORM'), category = _('IFF')}, INTERNAL LIGHTS: Added these lines to allow the light test switch to work: {down = int_light_commands.Switch_Compass_Light_Test, cockpit_device_id = devices.LTINT, value_down = 0, name = _('Compass Light/Test COMP'), category = _('Internal Lights')}, {down = int_light_commands.Switch_Compass_Light_Test, cockpit_device_id = devices.LTINT, value_down = 0.5, name = _('Compass Light/Test OFF'), category = _('Internal Lights')}, {down = int_light_commands.Switch_Compass_Light_Test, cockpit_device_id = devices.LTINT, value_down = 1.0, name = _('Compass Light/Test TEST'), category = _('Internal Lights')}, EXT LIGHTS: I have recoded the position light switch coding with these 3 lines to have a more logical way of using this switch and removed the POS LIGHT TOGGLE coding in the original (2 lines): {down = ext_light_commands.Switch_POS_LT, cockpit_device_id = devices.LTEXT, value_down = 0, name = _('POS Lights OFF'), category = _('Exterior Lights')}, {down = ext_light_commands.Switch_POS_LT, cockpit_device_id = devices.LTEXT, value_down = 0.5, name = _('POS Lights DIM'), category = _('Exterior Lights')}, {down = ext_light_commands.Switch_POS_LT, cockpit_device_id = devices.LTEXT, value_down = 1.0, name = _('POS Lights BRT'), category = _('Exterior Lights')}, Added these 3 lines for the lights master switch for a more logical way of switching: {down = ext_light_commands.Switch_EXT_LT_NORM_NVG, cockpit_device_id = devices.LTEXT, value_down = 0, name = _('EXT LIGHTS OFF'), category = _('Exterior Lights')}, {down = ext_light_commands.Switch_EXT_LT_NORM_NVG, cockpit_device_id = devices.LTEXT, value_down = 0.5, name = _('EXT Lights NVG'), category = _('Exterior Lights')}, {down = ext_light_commands.Switch_EXT_LT_NORM_NVG, cockpit_device_id = devices.LTEXT, value_down = 1.0, name = _('EXT Lights NORM'), category = _('Exterior Lights')}, KNEEBOARD - NO CHANGE CHEAT - NO CHANGE DEBUG - NO CHANGE AXIS COMMANDS: Added these lines to enable all the light adjustment dials to be controled with a potentiometer if making a home cockpit: {action = ext_light_commands.Knob_FORM_LT, cockpit_device_id = devices.LTEXT, name = _('Formation Lights Knob Axis')}, {action = hud_commands.DisplayBRTKnob, cockpit_device_id = devices.HUDCONTROL, name = _('HUD BRT CONTROL')}, {action = hud_commands.VideoBRTKnob, cockpit_device_id = devices.HUDCONTROL, name = _('VIDEO BRT CONTROL')}, {action = hud_commands.VideoCONTKnob, cockpit_device_id = devices.HUDCONTROL, name = _('VIDEO CONT CONTROL')}, {action = edp_commands.BRT_Knob, cockpit_device_id = devices.EDP, name = _('EDP BRT CONTROL')}, {action = int_light_commands.Knob_Instr_Lights, cockpit_device_id = devices.LTINT, name = _('INST PANEL LIGHTS BRT')}, {action = int_light_commands.Knob_Console_Lights, cockpit_device_id = devices.LTINT, name = _('CONSOLE LIGHTS BRT')}, {action = int_light_commands.Knob_Flood_Lights, cockpit_device_id = devices.LTINT, name = _('FLOOD LIGHTS BRT CONTROL')}, {action = int_light_commands.Knob_Annunciator_Lights, cockpit_device_id = devices.LTINT, name = _('WARN/CAUT ANNUNC BRT CONTROL')}, {action = rwr_commands.Knob_RWR, cockpit_device_id = devices.RWRCONTROL, name = _('RWR VOL CONTROL')}, {action = acnip_commands.Knob_AUX_VOL, cockpit_device_id = devices.INTERCOM, name = _('ICS Aux Volume Knob')}, {action = ecs_commands.Knob_TEMP, cockpit_device_id = devices.ECS, name = _('ECS TEMP CONTROL')},
-
- 1
-

-
Hi guys, For the past few weeks I have been busy coding the LUA files whilst building my VR AV8B home cockpit. I have shared these with Razbam and hopefully they will implement them at some point. In case this doesn't happen I would like to share these with you. I am not an expert coder by any means, so it may not be perfect but it works. The main additions are for the joystick lua file but add the coding to the keyboard lua file if you wish to use keyboard key combinations for a switch position (mainly OFF positions). I use RS Mapper to enable a switch to function in the OFF position. For example, a 2 way stich has an ON and OFF position. In DCS you can only trigger an instruction in the ON position. With RS Mapper I have assigned a keyboard command to when the switch is moved to the OFF position. This keyboard command effectively gives me 2 inputs with 1 switch. The POKEYS software can also code this if you are making a home cockpit with one of their cards. So, in general I have not added keyboard coding for every switch/button, but usually they would have the option to assign a keyboard command for the OFF position (or the center position if it's a 3 position switch). The only knob I can not get coded correctly is the BINGO fuel one, if anybody has this coded please share. So here is what I have done to the lua file: The first section is JOYSTICK SWITCH ABSTRACTIONS: I added this to enable the Antiskid test function to also work and switch back to ON. {down = fcs_commands.Switch_ANTISKID, up = fcs_commands.Switch_ANTISKID, cockpit_device_id=devices.FLIGHTCONTROLS, value_down=1.0, value_up=0.5, name = _('Anti-Skid TEST else ON'), category = _('Joystick Switch Abstractions')}, I added these for the FLAP POWER SWITCH & the LANDING LIGHT SWITCH: {down = fcs_commands.Handle_PARKING_BRAKE, up = fcs_commands.Handle_PARKING_BRAKE, cockpit_device_id=devices.FLIGHTCONTROLS, value_down=1.0, value_up=0.0, name = _('Parking Brake Lever OFF else ON'), category = _('Joystick Switch Abstractions')}, {down = fcs_commands.Switch_FLAP_PWR, up = fcs_commands.Switch_FLAP_RESET, cockpit_device_id=devices.VREST, value_down=1.0, value_up=0.5, name = _('Flaps Power RESET else ON'), category = _('Joystick Switch Abstractions')}, {down = fcs_commands.Switch_FLAP_PWR, up = fcs_commands.Switch_FLAP_PWR, cockpit_device_id=devices.VREST, value_down=0.0, value_up=0.5, name = _('Flaps Power OFF else ON'), category = _('Joystick Switch Abstractions')}, {down = ext_light_commands.Switch_LANDING_LT, up = ext_light_commands.Switch_LANDING_LT, cockpit_device_id = devices.LTEXT, value_down = 1,0, value_up=0.5, name = _('Landing Light APP else HVR'), category = _('Joystick Switch Abstractions')}, {down = ext_light_commands.Switch_LANDING_LT, up = ext_light_commands.Switch_LANDING_LT, cockpit_device_id = devices.LTEXT, value_down = 0,0, value_up=0.5, name = _('Landing Light OFF else HVR'), category = _('Joystick Switch Abstractions')}, MASTER MODES - NO CHANGE HUD CONTROLS - NO CHANGE VSTOL CONTROLS: Added this to enable FLAP BIT BUTTON: {down = fcs_commands.Button_FLAP_BIT, up = fcs_commands.Button_FLAP_BIT, cockpit_device_id = devices.VREST, value_down = 1.0, value_up = 0.0, name = _('Flaps BIT Button'), category = _('VSTOL Controls')}, FLIGHT CONTROL - NO CHANGE SAAHS - NO CHANGE -- Hydraulic & Mechanical Added these lines to enable keybinding for the canopy locking lever: {down = misc_commands.canopy_lock_lever, up = misc_commands.canopy_lock_lever, cockpit_device_id = devices.FLIGHTCONTROLS, value_down = 1, value_up = 0, name = _('CANOPY LOCKING LEVER toggle'), category = _('Hydraulic & Mechanical')}, Created a new category for the ECM panel and added these lines to be able to assign a rotary switch to the EXP and ECM knobs : -- ECM Control Panel {down = rwr_commands.Knob_EXP, cockpit_device_id = devices.EWS, value_down = 0.00, name = _('EXP Decoy Dispenser Control : OFF'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_EXP, cockpit_device_id = devices.EWS, value_down = 0.25, name = _('EXP Decoy Dispenser Control: AUTO'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_EXP, cockpit_device_id = devices.EWS, value_down = 0.50, name = _('EXP Decoy Dispenser Control: UP'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_EXP, cockpit_device_id = devices.EWS, value_down = 0.75, name = _('EXP Decoy Dispenser Control: DOWN'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_EXP, cockpit_device_id = devices.EWS, value_down = 1.00, name = _('EXP Decoy Dispenser Control: RWR'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_ECM, cockpit_device_id = devices.EWS, value_down = 0.00, name = _('Jammer Control Mode: OFF'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_ECM, cockpit_device_id = devices.EWS, value_down = 0.25, name = _('Jammer Control Mode: STBY'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_ECM, cockpit_device_id = devices.EWS, value_down = 0.50, name = _('Jammer Control Mode: BIT'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_ECM, cockpit_device_id = devices.EWS, value_down = 0.75, name = _('Jammer Control Mode: RCV'), category = _('ECM Control panel')}, {down = rwr_commands.Knob_ECM, cockpit_device_id = devices.EWS, value_down = 1.00, name = _('Jammer Control Mode: RPT'), category = _('ECM Control panel')}, ENGINE & FUEL: Added this for the Fuel quantity indicator to be assigned to a 30 degree rotary switch. {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = 0.0, name = _('FQI: INT'), category = _('Engine & Fuel')}, {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = 0.33, name = _('FQI Mode: TOT'), category = _('Engine & Fuel')}, {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = 0.66, name = _('FQI Mode: FEED'), category = _('Engine & Fuel')}, {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = 0.99, name = _('FQI Mode: BIT'), category = _('Engine & Fuel')}, {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = -0.33, name = _('FQI Mode: WING'), category = _('Engine & Fuel')}, {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = -0.66, name = _('FQI Mode: INBD'), category = _('Engine & Fuel')}, {down = fqi_commands.FuelSelector, cockpit_device_id = devices.FQIS, value_down = -0.99, name = _('FQI Mode: OUTBD'), category = _('Engine & Fuel')}, ECS: Added these lines to enable all the switches on the ECS panel. The TEMP controller dial is in the AXIS section. {down = ecs_commands.Switch_FWD_EQUIP, cockpit_device_id = devices.ECS, value_down = 0, name = _('Fwd Equipment Bay NORM'), category = _('Environmental Control')}, {down = ecs_commands.Switch_FWD_EQUIP, cockpit_device_id = devices.ECS, value_down = 0.5, name = _('Fwd Equipment Bay ECS Switch'), category = _('Environmental Control')}, {down = ecs_commands.Switch_FWD_EQUIP, cockpit_device_id = devices.ECS, value_down = 1, name = _('Fwd Equipment Bay RESET'), category = _('Environmental Control')}, {down = ecs_commands.Switch_AFT_EQUIP, cockpit_device_id = devices.ECS, value_down = 0, name = _('AFT Equipment Bay OFF'), category = _('Environmental Control')}, {down = ecs_commands.Switch_AFT_EQUIP, cockpit_device_id = devices.ECS, value_down = 0.5, name = _('AFT Equipment Bay ON'), category = _('Environmental Control')}, {down = ecs_commands.Switch_AFT_EQUIP, cockpit_device_id = devices.ECS, value_down = 1, name = _('AFT Equipment Bay RESET'), category = _('Environmental Control')}, {down = ecs_commands.Switch_CABIN, cockpit_device_id = devices.ECS, value_down = 1, name = _('CABIN DEFOG NORM'), category = _('Environmental Control')}, {down = ecs_commands.Switch_CABIN, cockpit_device_id = devices.ECS, value_down = 0.5, name = _('CABIN DEFOG'), category = _('Environmental Control')}, {down = ecs_commands.Switch_CABIN, cockpit_device_id = devices.ECS, value_down = 0, name = _('CABIN DEFOG MAX'), category = _('Environmental Control')}, {down = ecs_commands.Switch_PRESS, cockpit_device_id = devices.ECS, value_down = 1, name = _('PRESS NORM'), category = _('Environmental Control')}, {down = ecs_commands.Switch_PRESS, cockpit_device_id = devices.ECS, value_down = 0.5, name = _('PRESS DUMP'), category = _('Environmental Control')}, {down = ecs_commands.Switch_PRESS, cockpit_device_id = devices.ECS, value_down = 0, name = _('PRESS RAM'), category = _('Environmental Control')}, ELEC PANEL: Added DC TEST switch function: {down = elec_commands.Switch_DC_TEST, cockpit_device_id = devices.ELECTRIC, value_down = 1, name = _('DC Test Switch STBY'), category = _('Electrical Panel')}, {down = elec_commands.Switch_DC_TEST, cockpit_device_id = devices.ELECTRIC, value_down = 0.5, name = _('DC Test Switch OFF'), category = _('Electrical Panel')}, {down = elec_commands.Switch_DC_TEST, cockpit_device_id = devices.ELECTRIC, value_down = 0, name = _('DC Test Switch MAIN'), category = _('Electrical Panel')}, Pilot & Seat controls - NO CHANGE HOTAS - NO CHANGE LEFT & RIGHT MPCD - NO CHANGE -- ARMAMENT CONTROL PANEL Added the following lines to be able to assign a rotary switch to the manual bomb fuzing knob and the selective jettison control: {down = smc_commands.Knob_Bomb_Fuze, cockpit_device_id = devices.SMC, value_down = 0.0, name = _('WPN MAN CONTROL : NORM'), category = _('Armament Control')}, {down = smc_commands.Knob_Bomb_Fuze, cockpit_device_id = devices.SMC, value_down = 0.33, name = _('WPN MAN CONTROL : N/T'), category = _('Armament Control')}, {down = smc_commands.Knob_Bomb_Fuze, cockpit_device_id = devices.SMC, value_down = 0.66, name = _('WPN MAN CONTROL : N'), category = _('Armament Control')}, {down = smc_commands.Knob_Bomb_Fuze, cockpit_device_id = devices.SMC, value_down = 0.99, name = _('WPN MAN CONTROL : T'), category = _('Armament Control')}, {down = smc_commands.Knob_JETT, cockpit_device_id = devices.SMC, value_down = -1.0, name = _('Jettison Mode Selector : STA'), category = _('Armament Control')}, {down = smc_commands.Knob_JETT, cockpit_device_id = devices.SMC, value_down = -0.5, name = _('Jettison Mode Selector : STOR'), category = _('Armament Control')}, {down = smc_commands.Knob_JETT, cockpit_device_id = devices.SMC, value_down = 0.0, name = _('Jettison Mode Selector : SAFE'), category = _('Armament Control')}, {down = smc_commands.Knob_JETT, cockpit_device_id = devices.SMC, value_down = 0.5, name = _('Jettison Mode Selector : CMBT'), category = _('Armament Control')}, {down = smc_commands.Knob_JETT, cockpit_device_id = devices.SMC, value_down = 1.0, name = _('Jettison Mode Selector : FUEL'), category = _('Armament Control')}, UFC - NO CHANGE ODU - NO CHANGE COMMS - NO CHANGE MISC PANEL: I noticed that the Last 2 lines in this section is actually wrong, the name is "Mission Computer mode AUTO/OFF or OVRD/OFF". This in fact controls the DP switch. I have recoded this to be correct with these 3 lines: {down = misc_commands.Switch_MC_Power, cockpit_device_id = devices.MSC, value_down = 1.0, name = _('Mission Computer Mode OVRD'), category = _('Miscellaneous Controls')}, {down = misc_commands.Switch_MC_Power, cockpit_device_id = devices.MSC, value_down = 0.5, name = _('Mission Computer Mode AUTO'), category = _('Miscellaneous Controls')}, {down = misc_commands.Switch_MC_Power, cockpit_device_id = devices.MSC, value_down = 0.0, name = _('Mission Computer Mode OFF'), category = _('Miscellaneous Controls')}, I also added these Probe heat switch function: {down = misc_commands.Switch_PR_HT_Mode, cockpit_device_id = devices.FLIGHTINSTRUMENTS, value_down = 1.0, name = _('PRB HEAT HT'), category = _('Miscellaneous Controls')}, {down = misc_commands.Switch_PR_HT_Mode, cockpit_device_id = devices.FLIGHTINSTRUMENTS, value_down = 0.0, name = _('PRB HEAT AUTO'), category = _('Miscellaneous Controls')}, VRS output : {down = misc_commands.Switch_VRS_Output, cockpit_device_id = devices.NAVFLIR, value_down = 0.0, name = _('VRS DISPLAY SELECTOR MPCD'), category = _('Miscellaneous Controls')}, {down = misc_commands.Switch_VRS_Output, cockpit_device_id = devices.NAVFLIR, value_down = 1.0, name = _('VRS DISPLAY SELECTOR HUD'), category = _('Miscellaneous Controls')}, VRS mode: {down = misc_commands.Switch_VRS_Mode, cockpit_device_id = devices.NAVFLIR, value_down = 0.0, name = _('VRS MODE SWITCH AUTO'), category = _('Miscellaneous Controls')}, {down = misc_commands.Switch_VRS_Mode, cockpit_device_id = devices.NAVFLIR, value_down = 1.0, name = _('VRS MODE SWITCH RUN'), category = _('Miscellaneous Controls')}, NAV Panel: Replaced the first 2 lines for the course selector switch with these 2 lines, now the course selector switch works without a problem. I do have the center position mapped to a keyboard command with RS MAPPER: {down = inst_commands.Knob_Course, down = inst_commands.Knob_Course, cockpit_device_id = devices.NAV_INS, value_down = -0.5, value_up = 0, name = _('COURSE SELECTOR CCW'), category = _('Navigation Control')}, {down = inst_commands.Knob_Course, down = inst_commands.Knob_Course, cockpit_device_id = devices.NAV_INS, value_down = 0.5, value_up = 0, name = _('COURSE SELECTOR CW'), category = _('Navigation Control')}, -- IFF , I added this section so that we can control the IFF switch ZERO/NORM/HOLD as you would do as part of the after landing checklist. -- IFF {down = acnip_commands.Switch_IFF_CRYPTO, up = acnip_commands.Switch_IFF_CRYPTO, cockpit_device_id = devices.ACNIP, value_down = -0.5, value_up = 0, name = _('IFF HOLD/NORM'), category = _('IFF')}, {down = acnip_commands.Switch_IFF_CRYPTO, up = acnip_commands.Switch_IFF_CRYPTO, cockpit_device_id = devices.ACNIP, value_down = 0.5, value_up = 0, name = _('IFF ZERO/NORM'), category = _('IFF')}, INTERNAL LIGHTS: Added these lines to allow the light test switch to work: {down = int_light_commands.Switch_Compass_Light_Test, cockpit_device_id = devices.LTINT, value_down = 0, name = _('Compass Light/Test COMP'), category = _('Internal Lights')}, {down = int_light_commands.Switch_Compass_Light_Test, cockpit_device_id = devices.LTINT, value_down = 0.5, name = _('Compass Light/Test OFF'), category = _('Internal Lights')}, {down = int_light_commands.Switch_Compass_Light_Test, cockpit_device_id = devices.LTINT, value_down = 1.0, name = _('Compass Light/Test TEST'), category = _('Internal Lights')}, EXT LIGHTS: I have recoded the position light switch coding with these 3 lines to have a more logical way of using this switch and removed the POS LIGHT TOGGLE coding in the original (2 lines): {down = ext_light_commands.Switch_POS_LT, cockpit_device_id = devices.LTEXT, value_down = 0, name = _('POS Lights OFF'), category = _('Exterior Lights')}, {down = ext_light_commands.Switch_POS_LT, cockpit_device_id = devices.LTEXT, value_down = 0.5, name = _('POS Lights DIM'), category = _('Exterior Lights')}, {down = ext_light_commands.Switch_POS_LT, cockpit_device_id = devices.LTEXT, value_down = 1.0, name = _('POS Lights BRT'), category = _('Exterior Lights')}, Added these 3 lines for the lights master switch for a more logical way of switching: {down = ext_light_commands.Switch_EXT_LT_NORM_NVG, cockpit_device_id = devices.LTEXT, value_down = 0, name = _('EXT LIGHTS OFF'), category = _('Exterior Lights')}, {down = ext_light_commands.Switch_EXT_LT_NORM_NVG, cockpit_device_id = devices.LTEXT, value_down = 0.5, name = _('EXT Lights NVG'), category = _('Exterior Lights')}, {down = ext_light_commands.Switch_EXT_LT_NORM_NVG, cockpit_device_id = devices.LTEXT, value_down = 1.0, name = _('EXT Lights NORM'), category = _('Exterior Lights')}, KNEEBOARD - NO CHANGE CHEAT - NO CHANGE DEBUG - NO CHANGE AXIS COMMANDS: Added these lines to enable all the light adjustment dials to be controled with a potentiometer if making a home cockpit: {action = ext_light_commands.Knob_FORM_LT, cockpit_device_id = devices.LTEXT, name = _('Formation Lights Knob Axis')}, {action = hud_commands.DisplayBRTKnob, cockpit_device_id = devices.HUDCONTROL, name = _('HUD BRT CONTROL')}, {action = hud_commands.VideoBRTKnob, cockpit_device_id = devices.HUDCONTROL, name = _('VIDEO BRT CONTROL')}, {action = hud_commands.VideoCONTKnob, cockpit_device_id = devices.HUDCONTROL, name = _('VIDEO CONT CONTROL')}, {action = edp_commands.BRT_Knob, cockpit_device_id = devices.EDP, name = _('EDP BRT CONTROL')}, {action = int_light_commands.Knob_Instr_Lights, cockpit_device_id = devices.LTINT, name = _('INST PANEL LIGHTS BRT')}, {action = int_light_commands.Knob_Console_Lights, cockpit_device_id = devices.LTINT, name = _('CONSOLE LIGHTS BRT')}, {action = int_light_commands.Knob_Flood_Lights, cockpit_device_id = devices.LTINT, name = _('FLOOD LIGHTS BRT CONTROL')}, {action = int_light_commands.Knob_Annunciator_Lights, cockpit_device_id = devices.LTINT, name = _('WARN/CAUT ANNUNC BRT CONTROL')}, {action = rwr_commands.Knob_RWR, cockpit_device_id = devices.RWRCONTROL, name = _('RWR VOL CONTROL')}, {action = acnip_commands.Knob_AUX_VOL, cockpit_device_id = devices.INTERCOM, name = _('ICS Aux Volume Knob')}, {action = ecs_commands.Knob_TEMP, cockpit_device_id = devices.ECS, name = _('ECS TEMP CONTROL')},
-
Ah ok, thanks for explaining that. I thought he was asking about waypoint or TCN offsets.
-

[REPORTED]The HUD indication issue on the Nevada map
Bog9y replied to lllcky's topic in Problems and Bugs
I have the same issue in the Normandy map but there the track is always indicating 10 degr left of your heading, no matter what the wind is. It's got nothing to do with if TRUE is boxed or not. Creating a separate bug report. -
Hmmm, got a weird bug when this mod is in my tech folder. I can not add vehicles in the mission editor. Really weird, you click on the tank icon to add a vehicle, you click on the map but nothing happens. No idea why. Any thoughts?
-
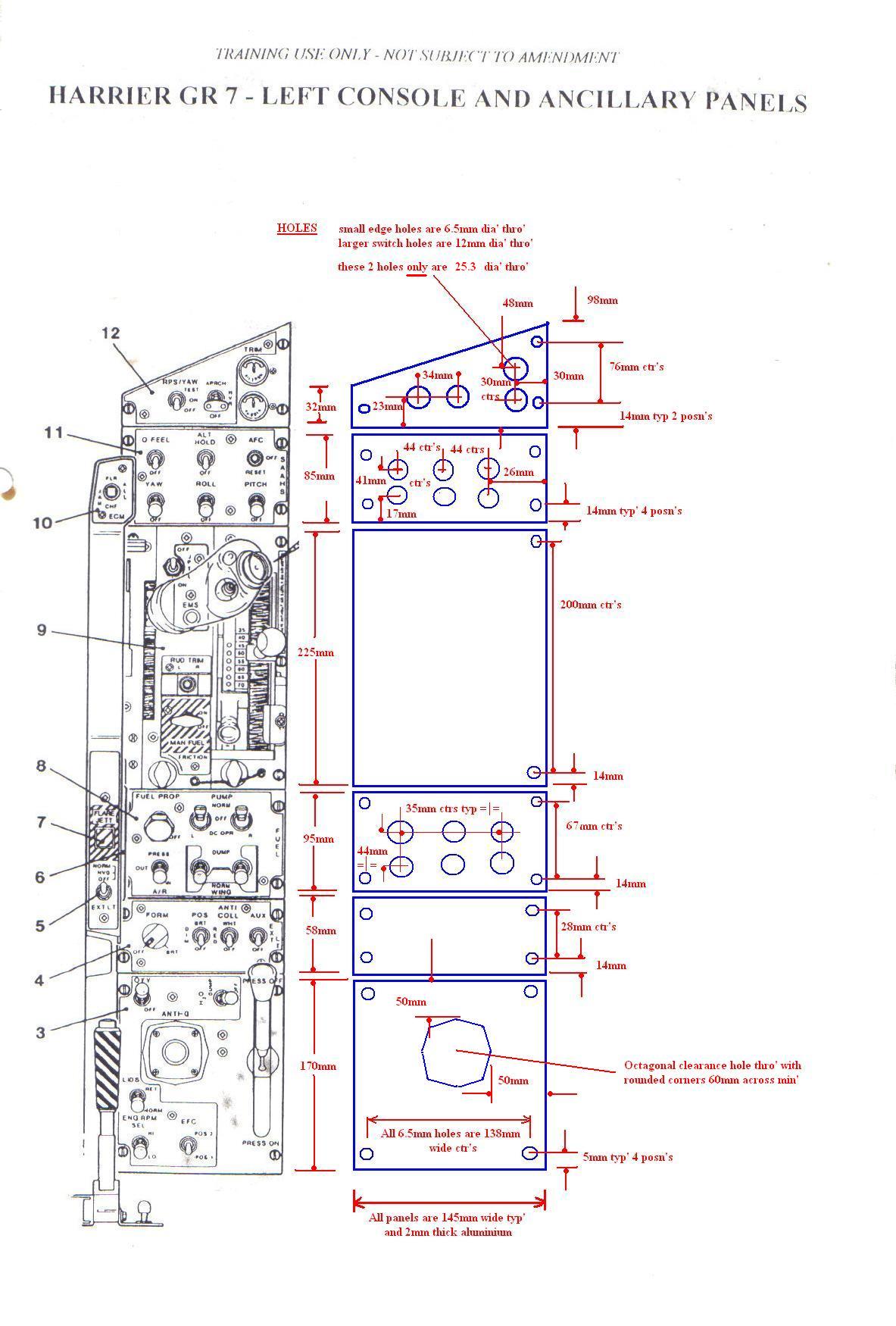
Yeah, just read that. That's a pretty good statement, haha. What I meant to say is the measurements are from the real thing, accurate within 1 or 2 mm.
-
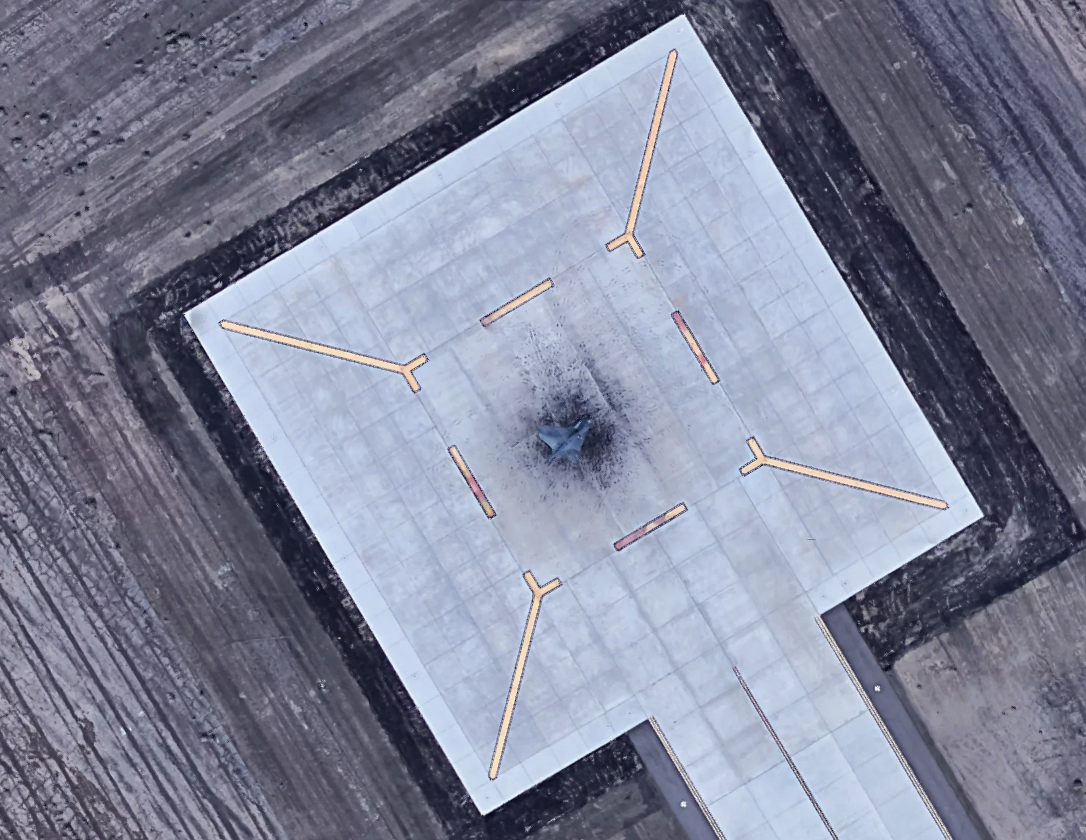
Can I be a total pain and ask for an even bigger pad? The total size should be 67 x 67 mtrs, if that's easy to do? If not, 60x60 (so double in size) is cool too.
-
[REPORTED] Instrument Panel Lighting Keyboard Mapping
Bog9y replied to SGT Coyle's topic in Problems and Bugs
I have the LUA coding to fix this if you want them? -
Quick service! Thanks, so is that 30 x 30 m for the whole pad, including the grey checkered bit?
-
So the pad (the grey checkered bit) should be 67 x 67 meters (220 ft x 220 ft) and the inner yellow square should be 30 x 30 meters (100 ft x 100 ft). Please let me know if you need any more info or a picture with the dimensions on it. Again, many thanks for this. Do you mind if I share it with fellow Harrier pilots?
-
Would you mind? I would really appreciate it. I can get you the exact measurements, one sec
-
Hey guys, I've been trying for several says now to get a rotary encoder to work with the Bingo dial but it just won't work. I think it's because the knob is coded as a "default_axis_cycle" and I think you need a specific phrase like "IcommandplaneBingoSetInc" as a command but I don't know what the phrase is. Does anybody have a clue how to get this knob coded?
-
Hi guys, has anybody been able to get the BINGO knob to work with any key binding? The one mentioned above doesnt work.
-
How to set up toggle switches (a tutorial)
Bog9y replied to Spy Guy's topic in PC Hardware and Related Software
I was thinking of changing the default_axis_cycle to a normal pushbutton function, and changing the part "380, 0, 0.01, false)" to end with false, true. Do you know if editing the lua is going to create a lot of problems or is it just like editing the joystick/keyboard lua? EDIT: tried it...and the effect was that I could not rotate the dial with the mouse in the cockpit. -
i just tried the mod and it's awesome! I'm trying to use it for the AV8B and hovering at 50 ft above it's hard to see the pad marking, is there any coding I can change to make the pad larger? say around 50% larger?
-
LEGEND!!!!! Thank you so much!
-
How to set up toggle switches (a tutorial)
Bog9y replied to Spy Guy's topic in PC Hardware and Related Software
The bingo works fine with the mouse scroll wheel for me. I have messaged the main coder of Razbam to ask for help. Hopefully we can get it fixed. -
How to set up toggle switches (a tutorial)
Bog9y replied to Spy Guy's topic in PC Hardware and Related Software
Do you think that this problem could be fixed by editing the clickabledata.lua file? -
How to set up toggle switches (a tutorial)
Bog9y replied to Spy Guy's topic in PC Hardware and Related Software
I also have problems with the RCS volume and channel selector. Can not use a rotary encoder with them at all. I think it's the coding. -
Is anyone here able to create markings like these vertical landing pads? I'm just looking after the markings, it doesn't have to be functioning like the marston pad (able to place on grass etc). I just need the markings to overlay on a revetment or concrete area. The 476th VFW created Field carrier landing practice markings to overlay on a normal runway so I was wondering if something like this is possible for VL pads?

-
How to set up toggle switches (a tutorial)
Bog9y replied to Spy Guy's topic in PC Hardware and Related Software
Hmmm, strange one. So with the rotary encoder, value of 1 does that mean changing the Bingo fuel from 0000 to 0100 , 0200, 0300 etc etc? Because that is how it should be. -
Guys, a very kind soul has shared the exact measurements of the UFC (not including the master caution/warning rows). Its approx 136x142 mm .
-
Guys, a very kind soul has shared the exact measurements of the UFC (not including the master caution/warning rows). Its approx 136x142 mm . He also shared this, so the panels that the OP shared are pretty much exactly the right size: