Leaderboard

Popular Content
Showing content with the highest reputation on 06/10/10 in all areas
-
Пока наблюдается летнее затишье, предлагаю на ваше рассмотрение свежий скин к плееру AIMP. Давно уже собирался сделать что-либо подобное, сугубо для околоздешнего использования. За пределами нашего сайта, думаю, врядли кто заинтересуется таким дизайном... Стилизовал все под кнопки и тумблеры военного (авиационного) образца. Ползунки громкости, баланса и эквалайзера вывел на отдельные субблоки, имитируя РУДы. Выключатель плеера - это реальный "Аварийный сброс подвесок" Таймер - из отечественных ламп. Индикаторные лампочки от бортовой ЦВМ "Орбита-10" (Су-24) Архив распаковать в папку Skins. Вирплеер.rar
 4 points
4 points -
:D В левом верхнем.2 points
-
LotATC Lot of bugfix for this release: display, network and TeamSpeak. There is some enhancement and new features too: Lockon FC 1.2.x support (except mission loading for waypoints and weather) map database unit airports [*]New SVG map, larger than before [*]Network has been optimised (decrease by 80%), should be more efficient with lot of pilot/controller [*]Add taxiways and ILS approach on airports. Double click on airports to show them. It is a young module but I release it due to the lot of people who asking me about it! It will be enhanced with SVG and zoom in next releases. [*]Add datalink module for LoPlug connexion. With it, controller and pilots can exchange data (controller can send BRAA to LoPlug and pilot can send screenshot to controller). Link: Post and download on LotATC v3.0.0 (english) Lien et Téléchargement (français)1 point
-
Working on a updated and improved audio for LOCKON 2.0 stay tuned all.1 point
-
As to expected tgt range at a lower value I don't see the point. When I say 4 Bar scan I am not referring to manual antenna adjustments the Scan is (I believe a programmed L to R and up and down pattern that covers the full block of airspace that is 10degrees. In other words you get the whole 10,000m block in one hit at 60Km without any adjustment, the radar does this for you. (now in FC2 its all emulated as I don't think the antenna actually steps up a bar on each alternate sweep as it does in a real jet but the effect is the same). When you make a Delta H adjustment you raise or lower this entire 4Bar scan volume. Delta H just varies the angle of the centre point of the whole 4 Bar scan pattern. All you are doing with Delta H is changing the centre of that scan. at 60Km expected range each Delta H click changes the antenna tilt (and the entire scan volume centre point) by 1 degree. Now if you step the expected range back to say 10Km then exactly what change in tilt do you get then get for each Delta H click ? I have no idea. If you don't know this then how can you say you know you are covering the entire scan area without gaps ? If someone can figure out the precise algorithm that determines antenna tilt as a function of Delta H and expected target range the question could be answered. Here lies the problem. The only indication you have of antenna tilt is the elevation scale on the MFD. However there are no values associated with it and Antenna tilt at various expected range values is non linear. At 60Km expected target range it is linear and 1 degree per Delta H click. Either way the radar antenna has fixed Gimbal limits. So whether you set the expected target range to 10km or 100Km the antenna can only elevate or depress a fixed angular amount. You have the same antenna tilt range regardless of expected target range setting.... its just try to figure out where the antenna is pointing. ""Yes this is what I was trying to get at by having the expected range at 10km. A 4bar scan, with expected range at 10km, should cover a greater amount of sky without gaps between bars." Why ? You get 10degrees of scan volume regardless of expected target range all you are changing is the size of the antenna tilt increments by reducing expected target range. In other words for each Delta H click you might be getting a 3 degree change in antenna tilt but who knows exactly how much you are getting ?Another way of thinking about is that expected target range is like an antenna tilt rheostat as you play with expected target range you are varying the amount of antenna tilt per Delta H click .... but by an unkown amount. Now when you are in close a larger tilt per click might be advantageous but we are talking about the general unassisted search or Fighter sweep scenario. Having a little play in the Su27 Quick action set up. 2 targets at around 70Km range unknown altitude. With Expected target range at 10nm I can find the paints. However 1 click in Delta H each way and I loose the paint. With Expected target range set to 60Km it took 3 or so delta H clicks to loose the paints. Therfore antenna tilt control is more precise. So this to me shows that antenna tilt (scan volume tilt) is in bigger (and unpredictable) amounts the lower you set the expected target range. That then implies the possibility of gaps in a meduim to long range search scenario.1 point
-
Yeah, posted June 7th 2010, truly an ancient video :D Well, i've never seen that video before, thats awesome :thumbup:1 point
-
Yeah this video is quite old :] Anyway I'd like to steer Predator in LO :D1 point
-
Yep..no "Top Gun" views here..:music_whistling:1 point
-
)))) И такое бывает.. после рабочего дня :thumbup: Спасибо за поправку.1 point
-
@IvanK wouldn't it be wiser to keep the expected range lower than 60km so that you can cover higher altitude with lower "bars" (elevation adjustments), for example setting it to 20-30km and doing a 3 bar scan is going to cover complete spectrum of altitude a bandit may be flying at (12km+ alt is not covered by your proposed 4 bar @ 60km expected) @luza what GG and Spetz are referring to is called notching the bandit's radar. This is done by decreasing relative closure rate and introducing ground clutter so that the enemy's radar will have a hard time fighting the doppler effect and having to sort through the clutter. If you search the forums more you will find better explanations for this elsewhere.1 point
-
There's nothing random about it ... your target is doing something to make you lose it.1 point
-
Навигационные карты на МФД A-10C есть. Абсолютно те же, что используются в реальном самолете.1 point
-
^^^ Me-262 is an amazing aircraft.1 point
-
1 point
-
Давай-ка сбавим тон. Я тебе объяснил русским по белому, что это проблема выбора маршрута. Я не говорил, что это не баг. Что за мода приписывать собеседнику свои домыслы и выдавать их за истину? Особенно для человека со статусом "Партнёр"? ЗЫ Я могу и ошибаться в корнях проблемы, но уж то, что я не говорил, что не считаю это багом - точно.1 point
-
Hello Pilots :-) I've not seen you so much time, I'm miss you :-) Knowing from my own experience that LockOn community is very experienced in Movie Making, I have an offer for you. At the moment - LockOn community have provided the best video content in whole simulator's world. So, at the moment we're performing 2010 ROF Video Trailer Contest now and it will be great to enforce the competitive spirit if you will join it. This contest have terms which may interest you. Knowing you, I'm think that it is a great chance that one of you will win this contest, and the others will be in first row ;-) I'm hope it is not restricted by ED forums rules to post a link to Contest Rules page here? Here is it: http://riseofflight.com/Forum/viewtopic.php?f=2&t=10265&start=01 point
-
Блин, вот что за мода, отпихиваться от очевидного факта. В другой местности как маршрут колонне проложишь - так она и пойдет. Здесь-же - начинает сваливать куда-то. Еще скажите что это не баг.1 point
-
I don't have pedals, so I couldn't try. Maybe system "thinks" you have FFB joystick as you have pedals from FBB wheel. If this is a case, try this. Find producer.cfg. It should be in ...\Eagle Dynamics\Ka-50\Config\ Make backup of it. Open it with notepad and change first line to1 point
-
Rotary dashpots benchmark Rotary dashpots are precision fluid damping device witch give a smoth resistance to shaft rotation which increase with angular velocity. I tested two kings of rotary dashpot. Vane dashpot (the device with a dish in alu) give a restricted travel and high damping rate suitable for applications with reciprocating motions. It's a displacement damper. As the vane on the shaft rotates between fixes vanes on the body. Silicon fluid is displaced through controlled clearance from on side of the vane to the other. Continuous rotation dashpot (the little on the picture) gives viscous damping by sharing thin layers of silicon fluid between the concentric surfaces of a rotor and fixed stator. The first picture (in my hand), gives an idea of the size of the vane dashpot(weight 450gr).
1 point
-
Could well be 10 degrees. If that is the case it provides a little more overlap/coverage to the method. The real curse of the Russian system (when used without GCI) is that 1 click of tilt doesn't always result in the same angular displacement of the antenna. As you vary the expected target range the angular value per click also changes to fit the expected target range Delta H setup ! This is the reason you need to use a constant Expected Target range value so you have a firm datum to search the entire scan area ahead of you. Then you know that 1 click up or down will cover XX block of airspace at YY range and you wont leave any gaps. Here it is reworked on 10degrees total angular coverage. MIG29/SU27/SU33 Radar Elevation coverage. This assumes the Lockon FC2 Antenna elevation scan covers a total 10 degrees. (This is a 4 bar scan, Beam width is 2.5deg, there is some overlap sidelobes ? :) Range Km Altitude covered Metres 10Km............... 1,749Metres 20Km .............. 3,499Metres 30Km .............. 5,249Metres 40Km............... 6,999Metres 50Km .............. 8,748Metres 60Km............... 10,498Metres 70Km............... 12,248Metres 80Km .............. 13,998Metres 90Km .............. 15,747Metres 100Km ............ 17,497Metres 110Km ............ 19,247Metres 120Km ............ 20,997Metres So Broad brush at 5000m Altitude if you set the expected Target range to 60Km and Delta H to 0 you should be covering Surface to 10,498m altitude. Remember this is 4 bar So it takes some time (about 6 seconds) to cover the altitude block. At 30Km you cover 5,249metre block or from 2375m to 7625m in altitude. General Radar search. Initial system set up for general search. Radar range (HUD) set to 100Km. Set Delta H to 0. Set Expected Target range to 60Km. Position TDC at 0 azimuth at 60Km. Since we are using 60Km expected target range as the base line and Delta H is at 1000m intervals it follows that for each 1000m Delta H adjustment you are tilting the antenna 1 degree (1in 60 rule). So if roaring around in the weeds there is little point irradiating the centre of the earth. Since the 4Bar scan is 10 degrees then all we need to do is tilt the scan up by 5 degrees. This will put the bottom of the scan at your level. So if in the weeds set 60Km expected target range and Delta H to +5 In general the same sort of thing can be used for minor adjustments of the scan if your altitude is > or < 5000m. So say for instance you are 6000m, if you want to cover the same 0-10,000m block you would set the AH to -1. If at 3000m you would set Delta H to +2 Remember these are initial search settings. Once the action starts and target range starts reducing you will need to adjust Delta H to keep the target painting. As range reduces the scan volume reduces dramatically so antenna setting becomes super critical and requires quicker adjustment. No matter what it is super important to be patient and consistent, random desperate slewing of the antenna elevation serves no purpose. As the paint starts to fade a single Delta H adjustment in the right direction will usually “freshen” the target paint. If it disappears it probably means you went the wrong way (or the target dramatically changed his altitude) so give it 2 Delta H clicks the other way. Remember as soon as you take a lock Your Delta H and expected tgt range values are reset so when you return to search you need to re set the 60Km expected target range and Delta H value. With respect to Azimuth scan don't forget with the Russian radars you can offset the whole Scan Left, Centre and Right. For a serious scan and to cover the full left to full right you need to scan the entire elevation volume in each Azimuth scan. Again it requires a strict practised routine to ensure no gaps and it requires time. If flying with a Wingman then some co ordination can be used with each guy responsible for a specific bit of airspace both in Azimuth and elevation...... but that and sorting is a Volume in itself. TIP Unless under GCI/AWACS control ALWAYS set Expected Target range to 60Km.1 point
-
what happens when you get someone with a creative mind and a little dedication. can be done just takes work. also thank ED for getting the audio code a lot better third time lucky as well. ..really is enjoyable now , i love to sit watch the ai jets fly around now sounds amazing ingame. maybe one day i will get a job doing this work.1 point
-
Finde den Fehler einfach nicht. Habe auch keinen Schimmer ob es etwas mit der Drehgeschwindigkeit oder sonst etwa zu tun hat. Die Einstellmöglichkeiten im Arcaze habe ich alle Ausprobiert. Heute ist eine Bestellung über 20 Drehencoder mit Taster rausgegangen. Ich hoffe damit die Geschichte in den Griff zu bekommen, da ja noch einige Drehschalter einzubauen sind. Allerdings habe ich noch nie mit Drehencodern gearbeitet. Heute wurde die Garde meiner Joysticks geschlachtet. Geplant ist aus dem Unterteil meines Thrustmaster T-Hotas und dem Oberteil des Suncom F15 einen Stick zu bauen. Dazwischen kommt ein gebogenes Rohr das bis zum Boden reicht. Habe allerdings noch keinen Plan wie es mit der Rückstellung funktionieren soll. Hatte mal irgenwo Bilder mit Expandern gesehen. Müsste sowas allerdings erstmal testen. Wenn jemand andere Ideen hat immer her damit (am besten mit Bildern). Grüße toyojoe
1 point
-
Разобрал. Маневрирующая ракета. 54.60 сек (0,00 сек) Пуск! 01.60сек (7 сек) 3345кмч (махV) 6g 06.50сек (11.9 сек) 8.3g 11.70сек (17,1 сек) 6.7g 15.59сек (20,99 сек) 5.2g 19.80сек (25,2 сек) 6g 24.80сек (30,2 сек) 5.5g 28.40сек (33,8 сек) 1050kmh 5.3g Ключевая точка За все время полета ракеты минимальная развиваемая перегрузка не уменьшалась ниже 5G. Неманеврирующая ракета. 48.79сек (0,00 сек) Пуск" -11.21sec 56.40сек (7,61 сек) 3344kmh (махV) 2.4g 22.59сек (33,8 сек) 1181 кмч 1,5g Ключевая точка Получается: за 33,8 секунды активного маневрирования ракета потеряла 1181-1050= 131 кмч по сравнению с неманеврирующей? УНВП?1 point
-
Тоже вариант.1 point
-
Also, The VVS used to be broken up into Frontal Aviation, Long Range Aviation and Military Transport Aviation commands, which have been reorganised so that all are under centralised command in the smaller Russian Federation (the USSR was huge), but individual Air Regiments still consider themselves Frontal, Long Range or Transport in organisation. It means basically you have Fighter regiments (IAP), short range Assault Air regiments (ShAP), Bomber regiments (BAP) and Transport regiments (VTAP). The terms are still frequently used but for example Flankers blur the lines between several mission capabilities because of their phenomenal range, versatility, performance and load bearing. And as mentioned the commands are no longer distinct and independent. The primary fighter is the MiG-29 (9-13 is current, some 9-12 but most have been updated to 9-13 standard), with small numbers of Su-27S (upgrade to SM standard is underway) for long range duties (they're made almost completely of titanium and are quite expensive). I think there's like 3 Frontal Aviation fighter regiments of Su-27 (Lodeynoye, Besovets and somewhere too weird to find on google earth), two based around Leningrad for northern operations and the rest are MiG-29. Some Russian forumites probably have more detailed information on deployment equipment but this is what I've been able to find. All other Flankers are assigned to PVO regiments but these have become blurred in their role too with the VVS since 1991. The VVS does have small units for CAS duties (there aren't very many ShAP formations, but IAP fighters can do this role if required as well as small strike and light attack, otherwise BAP heavy hitters will be used) but this is secondary as the Russian Army has its own Independent Helicopter Regiments and helicopters in Russia are used like fixed wing aircraft elsewhere, capable of performing similar functions (ground attack, LCV, light-heavy transport, limited counter-air was added back when they were toying with the Ka50 and Mil-28 prototypes). Generally the way it works is that an army support requirement will have a mixed division organised into a temporary air corps from common military district stocks (air army), which will be attached to the ground forces at an army command level for coordinated action. The army regiments will have attachments of their own Independent Helicopter regiments. It's fairly similar to the way the US tactical air command works with some minor cultural differences. Also Frontal Aviation fighters did not initially have GCI datalink hardware installed, but are designed to work under direction from ground controllers (MiG-29S and Su-27 has datalink facility but this is used with Russian AWACS, I don't know if MiG-29A had this and older types didn't). Naval Aviation (AV-MF) is the independent detachment of the Russian Naval commands, whose primary missions are coastal defence, fleet air coverage, long range reconnaissance, generally land based and fairly recently providing small units to the fleet carriers (Yak-38, Su-33). The most conspicuous of their types are the Bear (Tu-144), Fencer (Su-24) and Backfire (Tu-22M). Regular fighter groups of Naval Aviation use normal Su-27, Su-30 and MiG-29, most recently some Su-34 production is allocated. These are attached to the four fleet commands. Finally PVO is a completely separate military organisation outside the command structure of the VVS, KoV (regular army) and Russian Navy. It is organised into Strategic District commands (as opposed to Military District commands), and comprises the strategic defence systems of Russia. Strategic districts have their own army and air detachments, the most famous being the IAP-PVO (home defence air regiments). These guys have the Su-27P (currently being upgraded to SM standard), Su-30 and MiG-31 (also under current upgrade program), as well as smaller numbers of MiG-29. Naturally their fighters are equipped with GCI/datalink hardware, and they use Su-30 and MiG-31 the same way the USAF uses AWACS. A typical PVO interception will involve a couple of Su-30 or MiG-31 (depending on region) flying command/control to be joined by up to six regular Fulcrum/Flankers en route to the target. These are used in a wide (ca.250km) pincer formation to widen cooperative signal reception on three facings and allow any aircraft sensor data to be used to direct any other aircraft weapon release. It's a pretty formiddable tactic without the vulnerabilities of AWACS near the combat zone.1 point
-
The first roads is on way. Here on high altitude on the Balkh city. The first rivers begans to flow Here on the Feyzabad valley.1 point
-
simple fix from 104th_Dredd and Mastiff Only do this if you have mod-man installed SIM-Mod F15, SU27, A10 mod installed on your FC2. {This pack contains the following: SIM-MOD A-10A Warthog F-15C Eagle by Gys and Valery, 3GO Su-27 Flanker TOMCATZ New Control Tower REQUIRED: MUST INSTALL WITH MODMAN 7.2 ===Version 1.6=== -Fixed bug where only one skin was being utilized. ===Version 1.5=== -Included all 99 skins by SIMMOD for A-10A instead of stock list of just 9. -Fixed A-10A cockpit placement bug. -Merged 'A-10.lua' and 'Copy of A-10A.lua' together. -Included Tomcatz new control tower. -Fixed LockOn Multiplayer launch bug where LockOn would crash. -Fixed skin list for F-15C to read skins included in Gys's and Valery's mod and not the default. ===Version 1.0===} ok 104th Dredd and myself spent a couple of hours and found that the containers.sht file did not match the simod pack 1.6 version it has been fixed now its 1.7 please check to make sure you have the same problem as mine, and Dredds if it does then down load this fix... simply load up your game go to the edit open up the F15 quik.miz Add a KA-50 country USA and place the B-20 rocket pods save and then click fly. When in cockpit unpause place F15 in alt hold "h" and speed hold "j".. F2 until you get to the KA-50, if you see pods you don't need the new sim-mod fix. If you do not see the pods , unload simod A10, F15, Su27 mod. and install the fix then run mod-man and reinstall the mod. To install this fix simply make sure your modman has uninstalled the simmod unzip this file and drag the fixed containers.sht file into the zipped folder in your Simmod rar file in the directory you place it in.looks like this in mod man rar\Bazar\container.sht overwrite the file and close. reload your modman and reinstall simmod. the containers.sht file was missing the rest of the package for weapons 98 to 150 so me and Dredd simple fixed it now it shows the rocket pods. :thumbup: :joystick:1 point
-
Anubis, could you write the complete code that works for you here please? This is a very interesting trigger.1 point
-
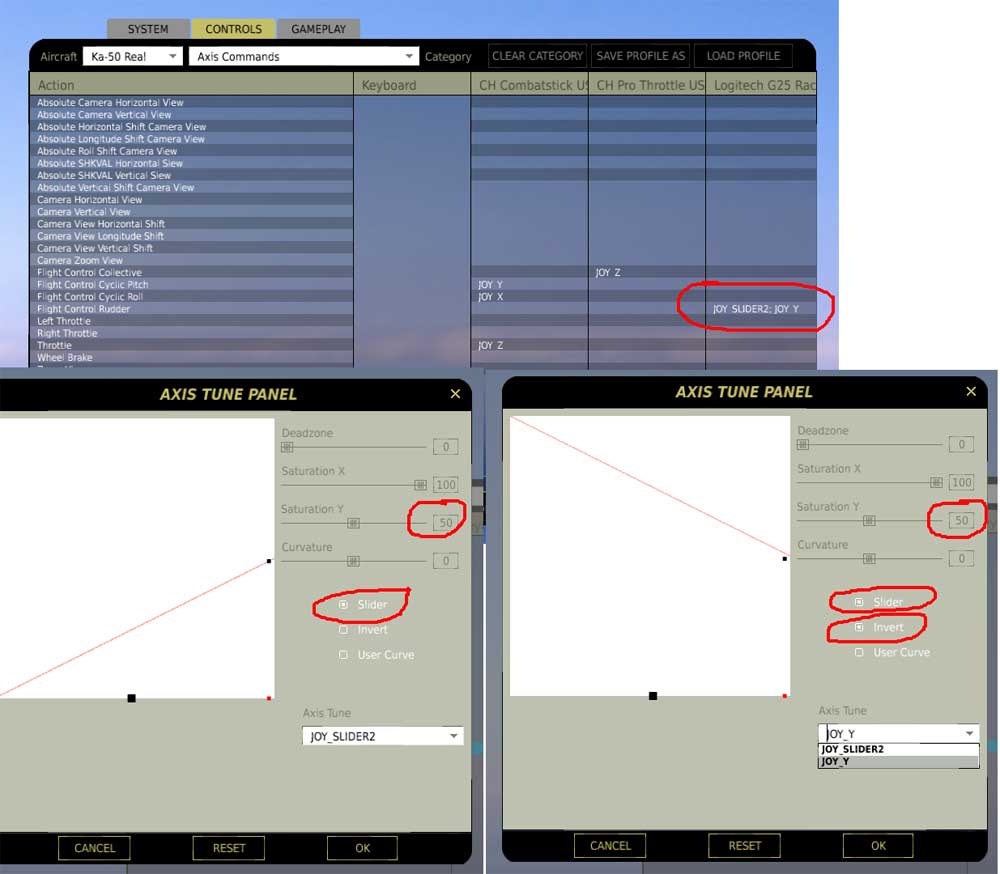
Hooorar - it can be done Logitech G25 wheel Rudder using the clutch and Accelerator 1. Logi profile should have brake and accelerator reported as separate axises 2. in game each control can have two assignments. assign the rudder to both the clutch and accelerator. to do this click on the rudder press accel peddle and OK, then do the same again for the clutch and assign both peddles (see screen shot) 3. fine tine the axis per the screen shot 4. now have full peddle movement of clutch and accelerator controlling the rudder without ipglove or ppjoy
1 point









-
Recently Browsing 0 members
- No registered users viewing this page.