Aquorys
-
Posts
327 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Aquorys
-

Anyone ride around with ATT HOLD on all the time?
Aquorys replied to Fuggzy's topic in DCS: F-16C Viper
I use attitude hold mostly when I am focused on systems, e.g. programming steerpoints, circling while identifying targets with the TGP. When I am just going from A to B long-distance, I level off somwhere at FL 300/320/340 and use altitude hold, typically with heading hold. PS: and I hand-fly larger heading changes, because the autopilot isn't smart enough to properly hold the altitude during turns -
normal alignment procedure - assistance required
Aquorys replied to AngryViper.101's topic in DCS: F-16C Viper
It is not that inaccurate, what you enter is just a rough start position. The gyros in combination with the GPS will figure out what the exact attitude, position and heading is, and the INS is continuously updated with INSM data, including GPS data, during flight (unless the alignment is completely screwed for whatever reason, and in that case, you would perform an in-flight alignment). A properly aligned INS is very accurate during flight, even without GPS updates, especially in the first hour of the flight, where the CEP (circular error probable) can be reduced to 60% of what it normally would be with an extended alignment procedure on the ground. -
normal alignment procedure - assistance required
Aquorys replied to AngryViper.101's topic in DCS: F-16C Viper
I just tested various alignment procedures, and in the more unusual ones, it does all kinds of funny things that it's not supposed to do and doesn't do others that it should do, so I guess you encountered some situation that is not fully implemented yet. One other thing you could try is an in-flight alignment, but I doubt that it will fix the problem, because it looks more like a data divergence problem in DCS between the TGP and the aircraft and less like a problem with actually aligning the INS. -
normal alignment procedure - assistance required
Aquorys replied to AngryViper.101's topic in DCS: F-16C Viper
Sounds like a bug to me. Have you tried selecting another steerpoint, and then the intended steerpoint again, and cursor-zero on the TGP? Power cycled the TGP? -
This happened when I started up while on ground power. I had most of the systems on, then started the engine, disconnected the ground power and performed an INS stored heading alignment. Everything seemed normal so far. I took off, then tried to configure my DGFT and MRM override modes. The DGFT override mode just said "SMS OFF" on my MFD, but the MRM override mode worked normally. I toggled ST STA off, then on again, in NAV, then in DGFT override, and when I finally did that in MRM override, it got stuck in "SMS OFF" too. When I switched to A/A mode, it worked normally though. I landed, shut down the jet, restarted without ground power and the problem was resolved. However, that does not seem like a plausible malfunction to me, so I believe it is an implementation bug in DCS - or probably rather a design bug. It would make sense for the SMS to be either on or off, regardless of which mode is trying to access it. I guess for the simulation, that means you want something like a single bool sms_available somewhere, and not some 5 independent copies of it, so bugs like this one could not possibly happen. I will try to reproduce this same problem and possible solutions in single player and report in this thread what I found out. PS: Do we have an F-16 avionics specialist in here who knows enough details about the hardware and software design to comment on whether the SMS could ever show up as on/available in one mode and as off in another mode at the same time in the real aircraft?
-
cannot reproduce and missing track file ILS not working
Aquorys replied to Alejo68's topic in DCS: F-16C Viper
Cannot confirm, I just flew the LOC/DME X 21L into Nellis with a transition to ILS at 7.2 DME, and everything worked as expected. Did you have that problem in singleplayer or on a multiplayer map? I remember ILS 08 not working in Kobuleti on the Caucasus map in some multiplayer missions despite 08 being the active runway assigned by the AI ATC. -
correct as is Continuous (all be it slow) pitch up
Aquorys replied to Arco's topic in Bugs and Problems
About 0.17G. Ignoring the fact that an F-16's engine would not work on the moon, and that an F-16 would not be able to fly on the moon due to the absence of an atmosphere that could produce lift, and instead assuming that it could fly on the moon, it would constantly pitch up instead of flying level. If you wanted it to fly level in an environment that is different from the 1G environment on earth, you would have to ground-calibrate the accelerometers to whatever the gravity is in that environment. -
correct as is Continuous (all be it slow) pitch up
Aquorys replied to Arco's topic in Bugs and Problems
Sounds normal to me, especially since it's not even trimmed for level flight, but for 1G acceleration. First of all, you don't have exactly 1G everywhere on earth, because the earth is not perfectly round and homogenous mass-wise, and gravity is an effect of mass and distance. Therefore, even a perfect 1G trim would show some pitch drift as you fly over different regions of the earth. But even if the aircraft used gyroscopes to make sure none of the aircraft's axes rotate, you would still get a small pitch-up drift in relation to the surface of the earth, because the measurements of gyroscopes are not coupled to the earth's curvature and rotation. -
reported AGP-68(V5) Radar Azimuth and Elevation Bar issue
Aquorys replied to skywalker22's topic in Bugs and Problems
I have my doubts about "further out", but quite certainly "faster", simply because you are scanning the same region more frequently. As a side effect, it might just pick up a target further out, because if you are scanning very frequently and therefore more often, there is obviously a greater chance that you will get good radar returns, especially if the target is maneuvering and thereby producing radar returns of varying intensity and quality. That is also pretty much the entire idea behind the "spotlight search" that you get if you hold TMS up. -
The Uragan is an unguided tactical ballistic missile system, it's for surface-to-surface only. The BMPs have guided anti-tank missiles (9M14, 9M113, 9M117) that have some short-range capability against low & slow aircraft. Although that would typically be used against helicopters, it can occasionally successfully engage aircraft, especially straight head-on. These missiles are typically wire-guided or laser-guided.
-
investigating AIM-120 Can't track through 360 turns
Aquorys replied to comie1's topic in Weapon Bugs
Haven't tried the 360, but I have seen the nosedive AMRAAM a lot recently -
No, "visual" is not a thing with AMRAAMs "Pitbull" is a radio call to inform other pilots that you have a missile in the air that has transitioned from being guided via the datalink to guiding autonomously using its own radar (and possibly a "Husky" call before, but the missile characteristics in DCS do not seem to implement that) If you fire an AMRAAM without a bugged target or radar lock on the aircraft, then it will immediately go active and look for targets, and the radio call for using it like that would be "maddog", not "visual". That's not how AMRAAMs work, there is no beam from the aircraft. If you fire the missile without initial guidance from the aircraft, then the only thing that matters is whether or not it can find and track the target. If it does, you can fly whichever direction you want, or you could even fire it with your radar turned off, and it would still hit. Hopefully it's a bandit and not a bogey, cause we'd prefer to know what we're shooting at
-
F-16 vs. JF-17 radar & BVR performance test flights
Aquorys replied to Aquorys's topic in Weapon Bugs
Just to clarify: I did not post this in any of the bugs forums, it was moved there, I'm assuming by moderators. My original post was in the general DCS: F-16 Viper forum. Regarding the radar detection ranges, the different RCS was already taken into account. The difference in detection ranges that I stated is what seems to be the consensus among real world aeronautics and radar specialists, but it is important to note that those are not measurements, they are still just theories, so the actual performance may turn out to be different. Regarding "i can't shoot down a JF-17": I didn't say that. In fact, I said that I won 4 out of the 5 test engagements. I don't know why this ended up in the JF-17 bugs forums temporarily, but as I already stated, I didn't ever put it there, someone or something else did. -
F-16 vs. JF-17 radar & BVR performance test flights
Aquorys replied to Aquorys's topic in Weapon Bugs
The F-16 does too, the AN/APG-68 is a multimode radar -
CAT III gives you less AoA and about 40% decreased roll rate compared to CAT I, but the FLCS changes control laws and sensitivity of controls based on various factors in both configurations. I'm not sure why you would want to be in CAT III with a CAT I loadout. With the landing gear down, you're in landing gains anyway, and those are already less sensitive than cruise gains. Didn't you just say in 1.) that you already had it extended? At 2 to 3 miles, you should be at ~600-1000 ft and ~160-200 knots for a stable approach, unless you are doing a steep approach for whatever reason (terrain, MANPADS threat, etc.), but that would typically be done at a lower speed You don't really need that one, as long as you have the runway and approach course. Both of those are on the kneeboard maps for the Caucasus and Nevada maps. Once you have that, you can just select the radial according to the approach course and use the course deviation indicator and distance measuring equipment to fly the approach. Optionally, if an ILS is available, you can intercept the localizer and glideslope for the ILS approach. The Nevada map even comes with a couple IFR charts for various approaches.
-
F-16 vs. JF-17 radar & BVR performance test flights
Aquorys replied to Aquorys's topic in Weapon Bugs
Thanks for the link. I just read it, that goes mostly in the direction of what seem to be the current problem sources with regards to the F-16's radar performance and usage (as modeled in DCS). I can try to run this same scenario again after the July update and see how much impact it has, and will follow up here if I get around to doing that. -
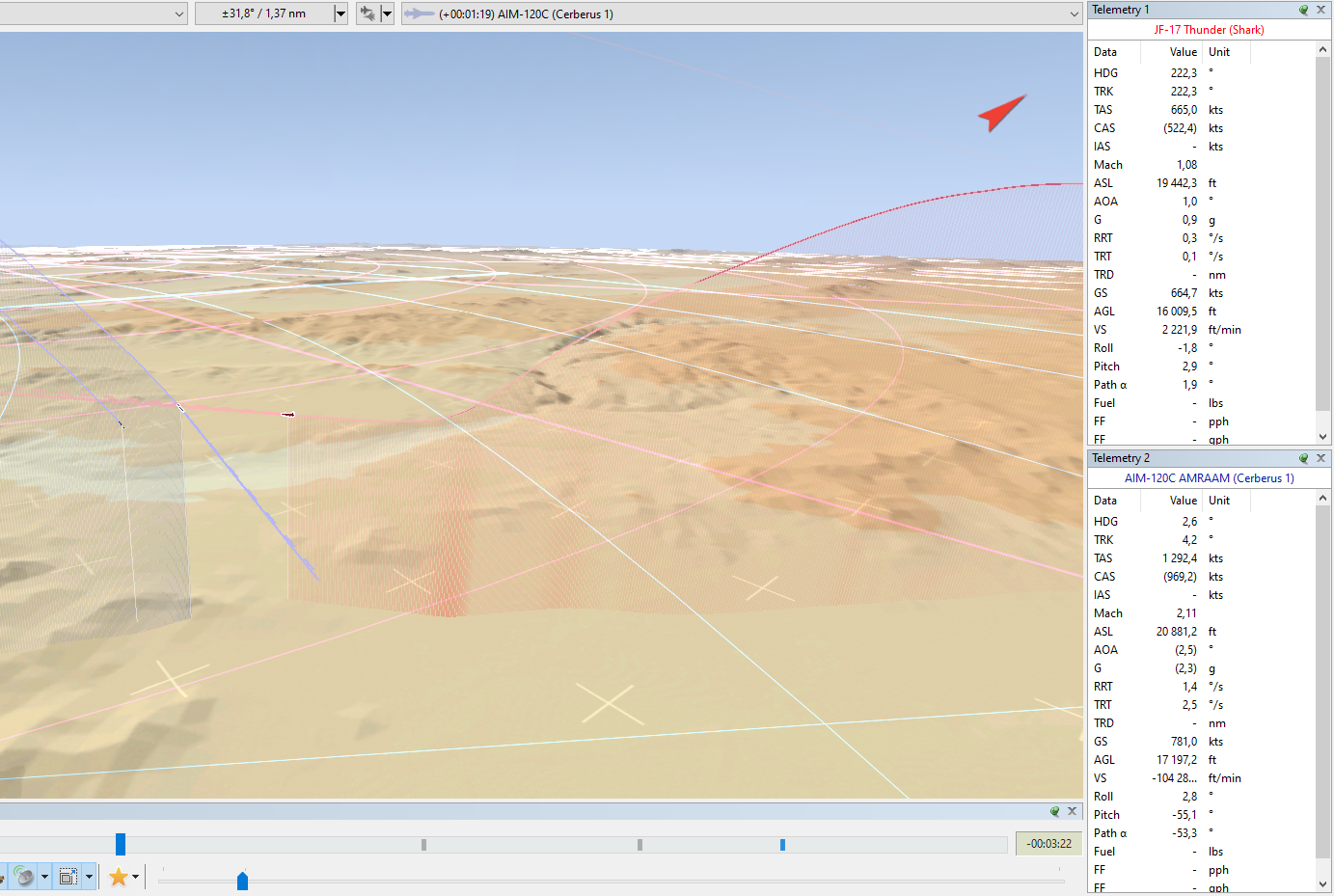
As some people have complained about the F-16 currently being useless in BVR against aircraft like the JF-17, I did some test flights, just in single player against AI aircraft, and tried to dig up some information on how the F-16 compares to the JF-17 in real life. Here is what I found out. My test flights Situation: Initial distance 54nm, advantage JF-17, F-16 (me) at 30k ft, M0.97, JF-17 at 36k ft, M1.04. 5 Sorties I decided to fire at more conservative speeds between M1.1 and M1.2, because you'll probably not be able to go M1.4 all the time. The JF-17 fired between M1.2 and M1.5, typically around M1.45. The maximum range that I could get the target bugged was 33 nm, and the longest range missile shot I could realize was 31.5 nm. The radar contact was unreliable. RWS pretty much didn't work at all, so I did almost everything in TWS, but TWS would take between 13 and 25 seconds between first indicating a radar contact to actually being able to bug or lock the target. The JF-17 typically fired around 32 nm, the longest range shot was 38.5 nm. It could fire first every time. Since the JF-17 had a tactical advantage regarding speed and altitude, that put me very close to the no-escape zone of his weapons before I was able to launch. The bigger problem however was that in most of the cases, AMRAAM guidance failed, and the JF-17 escaped with absolutely ridiculous defensive maneuvers. It would typically change course by only about 5 degrees to starboard for a few seconds, descend to between 14k and 20k ft, and then resume on the original heading and climb again, and the AMRAAMs would immediately go completely stupid and fly straight into the ground several miles in front of the target, and that was not a kinetic energy problem, it was a guidance problem. This was also confirmed by the one time where my first AMRAAM didn't fail, and the JF-17 even defended much more effectively by turning left about 100 degrees while diving to ~10k ft, because when that one hit him, it was still doing M1.3 despite his several course changes. The final outcome of these 5 sorties was that I ate an SD-10 once, but could still win the other 4 fights. The best one was a single-shot, the others required 3 or 4 AMRAAMs before one would actually work properly. The real world aircraft I am not sure which version of the JF-17 is supposed to be modeled in DCS. If it is one of the earlier models, it would have a KLJ7 V-1 mechanical planar array radar, not too different from the one in the F-16. The general consensus among the aeronautical engineers and radar guys seems to be that the F-16 should be able to detect the JF-17 before the JF-17 detects the F-16, with a roughly 15-20% range advantage for the F-16. However, if it is a pretty recent version (we're talking 2018+, more likely 2020+), then it could have a KLJ7A radar (retrofitted or as standard), which is a completely different beast, because this one is an AESA radar. I would not be surprised if that one were able to detect an F-16 first. So if you're complaining that the F-16 struggles against the JF-17 in this case, that could be quite plausible, and there would not be anything wrong with that at all. Conclusion From everything I could figure out, my final impressions are: Assuming we're dealing with pre-2018 JF-17 models, detection ranges are backwards between the F-16 and the JF-17 RWS in the F-16 currently is virtually unusable TWS in the F-16 has significant functional/usage problems, tracks are unreliable AMRAAM guidance currently fails almost always against targets that perform even just moderate maneuvers in the vertical plane Better tactics still wins, unless you run out of missiles (which might be due to bad tactics though) Nope.

-
The AoA decreases somewhat as you enter the ground effect shortly before the touchdown due to increased lift. I normally keep the flight path marker at the top of the AoA bracket on approach, then as I flare, two things happen: 1. ground effect decreases AoA, 2. flaring reduces speed, which increases AoA. I flare to almost level flight, let's say, with the flight path marker about 0.5 degrees below the horizon line, and then I just reduce thrust and keep the nose-up angle until the aircraft touches down. Once the rear wheels contact the runway, nose up to 12~13 degrees AoA, relax the stick around 100 knots to let the nose come down, as the nose comes down you pull back on the stick to soften the touchdown of the nose gear. Finally, fully extend the airbrake and apply wheel brakes, nose-wheel steering on, stick all the way back, and optionally hold the pitch override. That being said, don't make the landings too soft. I'm not saying you should slam it into the ground like a Hornet onto the boat, but a good landing is one where the aircraft settles firmly onto the runway. You don't want it to be still flying when the wheels touch the ground, it'll just make it jump around and possibly up again, might get you into pilot induced oscillation, etc., so trying to make it a super-soft landing might just end up making it a harder one than going for a firmer landing in the first place.
-
You're looking for "TMS up" (TMS = Target Management Switch, a 4-way switch on the stick). Bind that to some joystick button or to a hotkey on the keyboard.
-
Thank you for the feedback. PDF files are currently work in progress, they will presumably be available for printing in Letter and A4 format. Update: The checklists are now available for download at https://www.digitalcombatsimulator.com/en/files/3322978/ The download is a ZIP file containing a directory with the individual PNG files.
-
An advantage of modern jets like the Viper is that they don't just show you your airspeed and vertical speed, they also show you the flight path in degrees, so you can just use basic trigonometry to calculate any one of distance/altitude/glide angle from the other two. As it has already been mentioned, a typical final of 3 nm equates to 955 ft above ground, obviously 6 nm is twice that. If you want to descend quickly, you get about 1:1 distance in nm to altitude in 1000 ft it you keep descending at an approximately 9 degrees angle (meaning you'll descend ~15k ft in 15 nm). The formulas you are looking for are: g = arctan(a / (6076 * d)) d = a / (6076 * tan(g)) a = tan(g) * d * 6076 where g is the glide angle, d is the distance in nautical miles and a is the altitude in feet. Note that different calculators use different inputs for trigonometric functions, so you might need to convert (e.g., mine expects radians, not degrees).
-
I guess you'd want to trim roll if you have released a weapon and have an asymmetric load as a result. I do, cause I'm not a big fan of having to push the stick all the time. Wrt. other FBW aircraft, some do more auto-trimming than the Viper, e.g. virtually anything that comes from Airbus/EADS - all the modern civilian jets like the A320/330/340/350/380, but also the Eurofighter or military transport aircraft like the A400. Malicious gossip has it that a perfectly normal Viper FBW behaves somewhat similar to a degraded Airbus (one that's flying in so-called "alternate law", cause some systems or sensors aren't working).
-
Wait until you see "military grade" Although, even then, sometimes there is a good reason for it. E.g., have you ever heard of the RAD750? It's a microprocessor that is used in avionics, e.g. for rockets, satellites and radiation hardened equipment. Those sell for about $200,000 per piece. Functionally it's the same as a PowerPC 750, which is what you find in a PowerMac G3 from ~1998, and you can buy those for about $50 per piece.
-
Just tested it, feels like it always did. The F-16 doesn't like to go slow though, so if your tanker is doing some 250 knots or so, expect it to be rather unstable in pitch. Around 300+ should be good. Rolling typically pitches the Viper up a little bit, you might want to trim down a little bit while refueling. Gains are different if the refueling door is open (in DCS as well as on the real aircraft). The dead zones may come from the joystick, even quite high-end joysticks for home use don't feel as accurate as the stick or sidestick in real aircraft or the professional simulators used for pilot training (which might also explain why the "real ones" are orders of magnitude more expensive that what you have at home).
-
Multiplayer F10 Map before Select Role
Aquorys replied to drspankle's topic in Missions and Campaigns
ESC to close the role selection, then F10 for the map works for me on the servers that I'm normally on