PilotMi8
-
Posts
4541 -
Joined
-
Last visited
-
Days Won
4
Content Type
Profiles
Forums
Events
Everything posted by PilotMi8
-
взведение ПУС нужно больше для того, чтобы сход НАРов был "ожидаемым" с т.з. последовательности их схода. Более того , если после одного залпа снова взвести ПУС, то подвижный контакт снова установится на ствол №1 (который уже пустой) и при следующем нажатии на РС начнет с него. Т.е. нажатие РС ни к чему не приведет (если не менялась длинна очереди).
-
пока такой задачи не ставилось
-
сделаем.. не в этом обновлении, но позже будет
-
гммм... будем смотреть, спасибо!) Может и вправду плохо!)) придется кислород подключить...
-
мы не со зла)) доделываем сейчас!... правда в апдейт ближайший скорей всего не успеет войти (
-
проблема с пуском тяжелых НАР (С-24Б) потому, что С-24Б очень чувствительна к скорости носителя в момент пуска, и к дальности (т.к. темп понижения ракеты от дальности больше, чем у С-8 например). Таким образом ошибка в дальности (между расчетной дальности, для которой выставлен угол прицеливания) и нерасчетная скорость дают значительно большую ошибку, чем при тех же условиях для С-8.
-
спасибо, попытаемся поймать, но приложите плиз лог отсюда: "c:\Users\ALEX\Saved Games\DCS\Logs\dcs.log"
-
а мы уж как согласны!)) задача уже запланирована... очереди ждет
-
спасибо, за столь глубокое исследование модуля! всё, что Вы обнаружили, постараемся обнаружить тоже и устранить. - про ВСУ: не совсем так, как Вы предположили. Используется моделирование сжатия воздуха (с какими-то исходными параметрами) компрессором и затем "снимается" температура этого сжатого воздуха. - плотность топлива насколько я помню в DCS не изменяется (но уточню на всякий случай, т.к. ядро DCS постоянно развивается, и можно что-то пропустить).. это повлияет только на вместимость топливных баков. В теории каким-то образом еще наверное на воспламенение топлива при запуске, и это влияние не "пощупать". Думаю пока что это для 99,9% применения Ми-24 в игре это не актуально. ПС. Уточнил. Не изменяется плотность топлива в DCS от температуры
-
само собой. В DCS если ветер имеется, значит он "вливается" в общий поток, действующий на ЛА, в т.ч. и для случая с РВК
-
да, был такой баг, починили, ВСУ недодавало давление. Но проверим еще
-
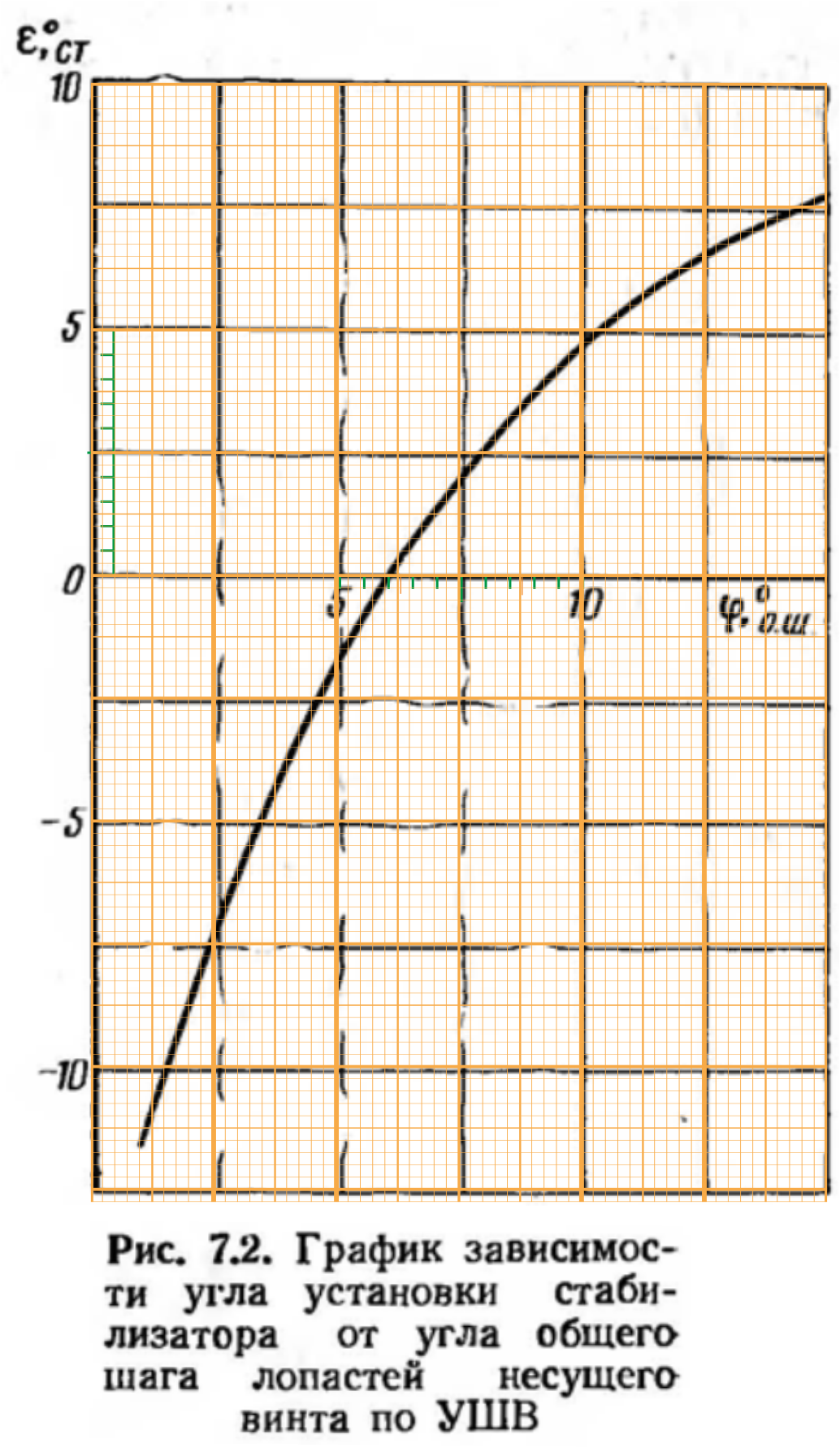
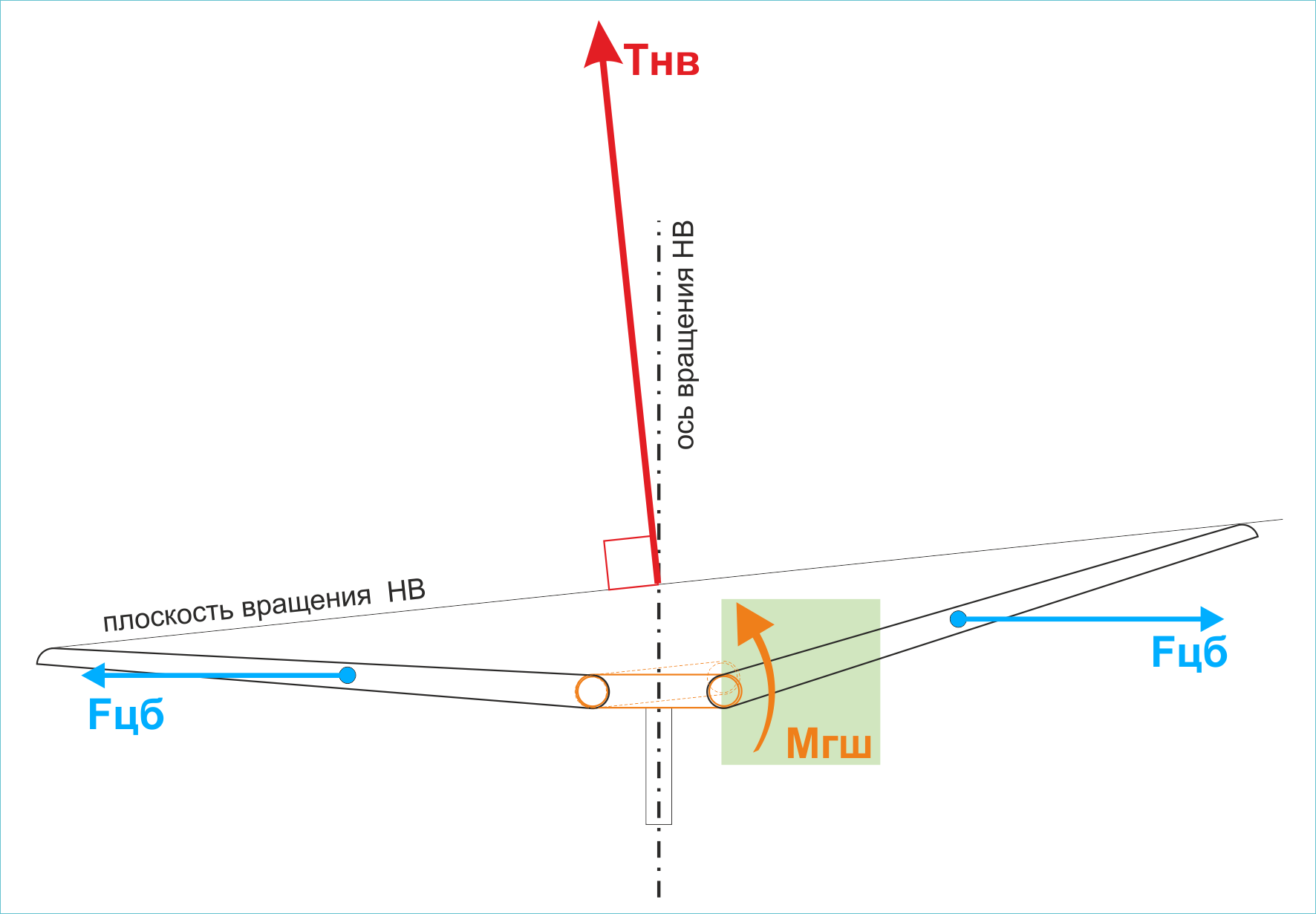
в модели это всё работает. Но изолированно увидеть влияние отклонения стабилизатора на кабрирование и пикирование очень не просто, т.к. для изменения положения стабилизатора необходимо изменять положение РОШ. Изменение положения РОШ изменяет очень значительный момент, образованный тягой НВ и плечом, которое отсчитывается от положения ц.м. к оси, образованной от тяги НВ. Положение ц.м. в свою очередь по горизонтали и вертикали зависит от выработки топлива и наличия вооружения. Ось от тяги НВ (как линия, проведенная от вектора тяги вниз) тоже изменяет наклон от положения РППУ. И этот момент имеет довольно большое значение! Кроме того, влияет момент от горизонтальных шарниров, действующий относительно поперечной оси вертолета (Mz_ГШ), и зависящий от степени отклонения РППУ от нейтрали (стремится совместить ось вращения НВ с направлением действия силы тяги НВ). Поэтому "ярко" увидеть влияние момента от стабилизатора на тангаж не выйдет)). А если носок стабилизатора не отклоняется, то это наша недоработка в анимации! Спасибо, что заметили, поправим!)

-
-
Вы совершенно правы! Простите нас: и разработчиков, и консультантов, какое-то помрачение нашло на нас...не справились.
- 159 replies
-
- 16
-

-

-
видимо нужно указывать версию игры при описании бага. В частности: у кого опен-бета- будет нормально все с краном, у кого, стейбл - будет с проблемкой.
-
Не считаю ответ правильным, простите. Крестик если наносить, то только на стекло оператора. На командирском его нет. Кроме того, стоит заметить, что тов.IDDQD знает о вооружении Ми-24П и обо всем, что с ним связано в достаточной степени, чтобы сделать полноценную модель системы вооружения DCS: Ми-24П, которая у нас и реализована. И если у нас баги в ней имеются, то это точно от него не зависит)
-
у нас положение вверх - закрывало кран. А нужно, чтобы открывало.
-
да, спасибо, мы уже у себя разобрались, была ошибка, в следующих обновлениях будет исправлено
-
Про первое - у нас в модуле пока не правильно, Вы описали как должно быть, все верно. Это работа ВУАП-1 (автопилота). Про второе и третье - САУ конечно не может больше возможностей автопилота. Она является "командной" по отношению к автопилоту, а автопилот к ней "исполнительным" блоком. Но стоить заметить, что разделение больше условное, т.к. одно с другим связано множеством связей, и составляет по сути одну большую схему. Автопилот здесь практически идентичен по предназначению и реализации как АП-34Б в Ми-8. И позволяет управлять вертолетом в трех режимах: ручное управление (летчик управляет вертолетом без автопилота), автопилотное управление (летчик не перемещает органы управления, или вообще убрал руки и ноги с ОУ при включенном состоянии автопилота), комбинированное управление (автопилот поддерживает угловые положения, но всегда готов ко вмешательству летчика, и при таких вмешательствах сам не мешает летчику, переходя в режим согласования; после окончания перемещения органа управления летчиком (актуально для РППУ и педалей) автопилот начинает поддерживать новое положение крена тангажа, направления (направления - только, если включен демпфер педалей, сняты ноги с педалей, т.е. надпедльники не нажаты)). Про эти режимы достаточно подробно рассказано в руководстве DCS: Ми-8МТВ2. Более "интеллектуальная" надстройка управляет вертолетом в режиме автопилотного управления, получая сигналы от "дополнительных" (в сравнении с АП-34Б) источников - ДИСС-15 и РВ-5. К примеру - вертолет переместился на висении из-за порыва ветра в режиме САУ ВИСЕНИЕ. Автопилот от авиагоризонта и датчиков угловых скоростей лишь попытается устранить изменение крена и тангажа. И если бы более ничего не работало, то и "оставил" бы вертолет в новом месте над площадкой висения. Однако если работает режим ВИСЕНИЕ, то по сигналам от ДИСС-15 будет инициирована уже некоторая коррекция положения вертолета над поверхностью с восстановлением его прежнего курса и высоты висения. Т.е. с работающей САУ сигналы в автопилот идут не только для поддержания углового положения, а еще для поддержания положения относительно поверхности. Кнюпель на РППУ ни с автопилотом, ни с САУ не связан. Он связан только с механизмом градиента усилий (МГУ). Поэтому установка кнюпеля в новое положение по сути соответствует установке триммера Ми-8 в новое положение без отключения автопилота. Следовательно, изменение положения РППУ в кабине с пом.кнюпеля будет изменять текущее положение индексов на индикаторах нуля кассет автопилота. А если после этого нажать кнопку триммера (под большим пальцем которая), и при этом никак не перемещать РППУ, то непременно будет изменение положения крена/тангажа вертолета (небольшой рывок), т.к. поршень комбинированного управления в КАУ-115 вернется в центральное положение в своей камере, что в соответствии со значением отклонения от этого центрального положения и даст то или иное значение изменения крена или тангажа. После этого летчику нужно скорректировать положение РППУ (исправить крен/тангаж) и отпустить кнопку триммера. Напомню, это как должно быть. У нас сейчас немного не так, но исправим!
- 2914 replies
-
- 12
-
-
-
спасибо! просто повезло с командой)) да, непременно после объективной оценки будем "улучшать", "ухудшать", "тормозить"))
-
смотрите здесь и в обновлении у себя на ПК:
-

ОБНОВЛЕНИЕ_RU_Ми-24П в DCS 2.7.3.8494 Open Beta 2021-06-30
PilotMi8 replied to PilotMi8's topic in DCS: Mi-24P Hind
правда внесли новые баги) но куда деваться) -
ох...давайте сначала сделаем хороший образ второго члена экипажа Ми-24, а потом будем думать над другими вещами) про управление ЛА Джестером (может или нет) - не в курсе.