Raptor9
-
Posts
2163 -
Joined
-
Last visited
-
Days Won
4
Content Type
Profiles
Forums
Events
Everything posted by Raptor9
-
Then that begs the question: How are you determining that this incorrect? An assumption, rumor, or has it been stated by an F-16 SME elsewhere? I'm not trying to argue, I'm trying to ascertain where this statement that it is incorrect is coming from.
-
As usual, if you have public information that corroborates your claim, please PM BigNewy or Nineline.
-
There seems to still be some confusion as to how the force trim interacts with the flight computer and the logic of the hold modes themselves. The force trim mechanism in the AH-64D is indeed like other helicopters from a mechanical standpoint, but the force trim is also intertwined with the Flight Management Computer in conveying pilot intentions to the FMC. In addition, it is important to understand that just because a hold mode is enabled, it does not mean it is engaged with the flight control servo-actuators. You can enable Attitude Hold using the Force Trim/Hold Mode switch at any time, even on the ground. But the hold mode will not engage with the flight controls to provide inputs unless certain criteria are met. One of these factors is the position of the cyclic in relation to the force trim reference point, which corresponds with the position of the cyclic when the force trim was no longer being depressed. The Controls Indicator represents the cyclic's force trim reference location with the red X. If the cyclic is not within roughly 2% of this position, you can toggle Attitude Hold all day and display the box around the TAS readout, but it will have no effect on the flight controls. Once the cyclic is returned to the force trim reference position (assuming the force trim is not being depressed), Attitude Hold will attempt to capture the hold values that exist at that precise moment, depending on what sub-mode it is in and other engagement factors being met, and it will engage with the flight controls to attempt to hold this value. However, if the cyclic is moved away from the force trim reference position, you are once again exceeding the hold mode "breakout" value for the cyclic, and the hold mode will disengage from the flight controls (it won't deactivate altogether, which is why the hold mode box remains around the TAS readout). Alternatively, if the force trim is depressed, this will also cause the hold mode to disengage; and when the force trim is released it will establish a new reference point for the hold mode to use, since the reference point now coincides with the current cyclic position (assuming you stopped moving the cyclic when you stopped depressing the force trim). However, it needs to be stressed that the hold modes are not a full authority autopilot. The pilot needs to place the helicopter into a stable, trimmed state prior to engaging the hold modes. You can enable Attitude Hold at any time, but the force trim should only be released when you have reached the position, velocity, or attitude you want to be held. For example, if the force trim reference position is 1 inch forward of your current cyclic position, and you are holding a hover without the force trim depressed, and you activate Attitude Hold by pressing the Force Trim/Hold Mode switch to the left, the only thing that will happen is the box will appear around the TAS readout. Attitude Hold won't engage in Position Hold sub-mode to maintain the hover because the cyclic is beyond the breakout value. If you then let the cyclic spring forward or quickly moved it forward that 1 inch to the reference position, you have now incurred two factors to make the hold mode's job that much more difficult: 1) You have input a forward pitching motion that the hold mode now needs to arrest. 2) You have now biased the SAS sleeve in the pitch servo up against it's aft authority, limiting it's ability to not only stop the initial pitch motion, but also to regain the original reference position, which is now receding aft away from the helicopter because the aircraft has started to move forward from the forward pitching motion that you have incurred. In addition, simply tapping the force trim to update the force trim reference position does not guarantee the hold modes will have their full authority to use. It takes 3 to 5 seconds for the SAS sleeve in each flight control servo to center within it's authority, but it can only accomplish this while the force trim is being depressed. Simply tapping the force trim updates the reference position but does not allocate enough time for the SAS to center, in order to regain it's full authority in both directions that it may need to command the swashplate to move. To summarize, although the flight model and SCAS behaviors are still WIP, a good number of these "buggy" behaviors are being incurred by players refusing to use the force trim or expecting the hold modes to be able to perform the job of a full authority autopilot. I'm not saying anyone in this thread is guilty of not using the force trim, but I do see quite a number of posts of players stating they just don't use the force trim. While that is certainly an option, it is needlessly making things harder on themselves, and it directly interferes with the proper use of the various hold sub-modes in pitch, roll and yaw. EDIT: And just to clarify as to what did change in the recent Open Beta update, it was the criteria for when Attitude Hold could be enabled. Prior to the update, there was an inaccuracy in the logic that required the cyclic to be within the breakout value to enable the Attitude Hold. This was fixed to how it should be in this recent update so that you can enable it at any time, even on the ground, even if the criteria for it to engage doesn't exist at that moment.
-
Collected from the manual: If either crewmember uses this switch on their respective collectives, it swaps the NVS sensor assignments between crewstations. This is an example of why a major revision of the manual is underway. You have three items, the Collective Flight Grip, IHADSS Field-Of-Regard box, and NVS logic that all interact with one another, so hyperlinks to the applicable sections are needed. If it is dark outside, the Pilot is probably using PNVS to avoid crashing into something. You could also bring up the Pilot's video on the VID page to see what is being used, but crew communication is always the best.

-

new (english) manual available Manual AH64 Apache
Raptor9 replied to Clyber's topic in Bugs and Problems
The DCS AH-64D's Quick Start Manual is currently undergoing a major revision to improve it's structure, content, and format. However this is occurring in parallel to other manual revisions such as the A-10C and F-16, so it will take time. -
PNVS and NVS are not the same. "PNVS" is the name of a specific sensor turret on the nose of the aircraft. "NVS" is a mode in which either the PNVS turret or TADS turret can operate in either crewstation. Because the PNVS and TADS can operate as separate NVS sensors, both crewmembers can be using NVS mode at the same time, but neither crewmember can use the same NVS sensor as the other. If the pilot is using PNVS as his NVS sensor, the CPG must use TADS as his NVS sensor. If the pilot is using TADS as his NVS sensor, the CPG must use the PNVS as his NVS sensor. However, the TADS cannot be used for targeting as a sight if it is being used for flying as an NVS sensor. If you are in the CPG seat and you move your NVS switch to NORM or FIXED, you are engaging the TADS into a mode meant for flying, not targeting. This is why the sight is automatically set as HMD and flight symbology is displayed on your helmet display instead of weapon symbology. You can, but only if TADS is your sight. If you are in NVS NORM or FIXED, the TADS is being used as a sensor and your sight is HMD. You cannot make your sight your acquisition source because you cannot slave a sight to itself; therefore as the CPG, you cannot slave your HMD (as your sight) to the Gunner Helmet Sight because your HMD is already looking where it is looking.
-
This is a bug. TADS should be inhibited from selection as the CPG's sight if the CPG's NVS is set to NORM or FIXED.
-
reported Markpoint option "TGP" not showing up when cycling through
Raptor9 replied to Moonshine's topic in Bugs and Problems
@Moonshine reproduced and reported, thanks. There were some refinements made to the Markpoint logic, in that if a sensor is in track mode, it will automatically select the corresponding Mark option when the DED MARK page is opened. As long as the TGP is installed and powered, and the master mode/sub-mode is not in A-A, MSL ORIDE, DGFT, A-G CCIP, or A-G STRF, the "TGP" markpoint option should be available from the MARK rotary on the DED page, not just on initial display of the DED MARK page. This is working fine for me. However if you find some other conditions that cause this, please open a new bug report thread. One bug, one thread, please. It makes the community managers jobs easier when trying to sort through which bug threads have been reported, resolved, etc. -
This was fixed initially, but in the process of updating it for the rest of the rocket types, it needed to be addressed again. For now, limit rocket shots to 4-5km. Fortunately, this has already been fixed internally, but wasn't ready in time for this week's update. As for the red flag on the SAI, maybe try a slow repair after removing all mods that are installed, if any.
-
Like other aspects of the DCS: AH-64D, the navigation system is Early Access and there are many things that are required to be adjusted. This is one of them (the window is larger), but it comes down to available development priorities.
-
fixed Gun round max range limit then they disappear.
Raptor9 replied to ROACH308's topic in Weapon Bugs
I would like to remind everyone that posting videos or pictures of real people being killed is not appropriate. To provide clarification, it violates Rule 1.1 as being inappropriate for minors/underage individuals; and it also isn't very classy. Any content of this nature will be removed, and repeat offenders will receive warnings. Thanks. -
Indeed, as @Floyd1212 stated, this is how it has been since release. Coincidentally, this has been fixed internally to the correct TDU video aspect and you all should see it in an upcoming update.
-
correct as is JTAC laser beam not visible in FLIR but is visible in NVG?
Raptor9 replied to ShuRugal's topic in Bugs and Problems
To be fair, the FAQ section is in the Appendices towards the end. But the original reason that particular appendix was added was to dispel common misconceptions and answer some of the most common and frequent questions that were asked on the forums following initial release of the module. -
correct as is JTAC laser beam not visible in FLIR but is visible in NVG?
Raptor9 replied to ShuRugal's topic in Bugs and Problems
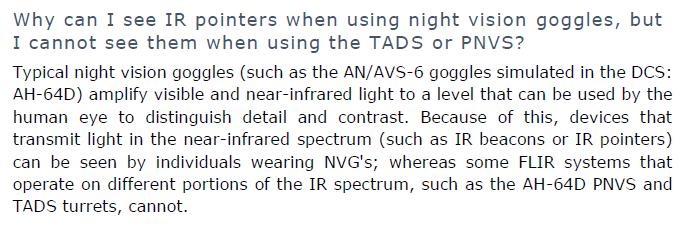
From the FAQ section of the manual:
-
VRP - Not switch from prev wp to RP next to TGT
Raptor9 replied to RagnarBSE's topic in DCS: F-16C Viper
When VRP mode is entered, it should automatically default to the TGT sighting option. You can change it to RP if you desire, and if RP is set as the sighting option you can perform an overfly designation of the RP using TMS-Up, just as the case in VIP. Having said that, there are some updates and refinements to VIP and VRP in DCS F-16 that are in development to correct some behaviors. -
TMS Aft commands Cursor Zero if the TGP is SOI and the TGP is not in Area or Point track. TMS Aft also commands the TGP out of Point/Area track and back to Inertial tracking. So if the TGP is in Point/Area track, the first TMS Aft commands the TGP to Inertial, the second TMS Aft commands Cursor Zero. It's all about the TMS commands contextually changing based on your SOI and the state of the tracking sensor.
-
The HOTAS functions in the current manual version on pages 80-84 are the only HOTAS functions implemented in DCS F-16C at this time. If changes or updates to the module include changes to the HOTAS functions, the manual will be revised.
-
correct as is Laser range finder doesn't behave correctly above 9999m
Raptor9 replied to FalcoGer's topic in Bugs and Problems
@FalcoGer, here is what you don't seem to understand. BigNewy, NineLine, or other ED staff are not coming down on you for posting bugs. They are coming down on you for your incessant attitude and disrespect towards others in your conduct within the bug report threads. You post quite a few bug reports that are regarding "fringe" behaviors or conditions. Yes, if bug reports are valid, they will be addressed in due time (and those are appreciated). However, it is a higher priority to ensure the "mainstream" behavior or condtions of the module are working first. This is what BigNewy was referring to when he said you were intentionally exceeding laser limits. Development is prioritized to those behaviors that are within the usable range of the laser. You demand that your bug reports be handled within a schedule that fits within what you think is acceptable, regardless of the larger picture; and when it is not, you resort to your usual attitude as a way of lashing out for some reason. Your disrespectful and immature attitude towards the ED community managers is quite tiresome, and this is why you have been given multiple warnings and some of your posts removed. Your other posts had nothing to do with reporting bugs, they were disrespectful rants. -
They function, but only if you are below 80 knots. It will only operate in Automatic mode above this speed.
-
@AirSenpai, please see the second post in this thread. Threads merged, and please do not post videos of real people being killed, regardless of the circumstances. Let's stick to the simulation aspect of Digital Combat Simulator. Thanks.
-
How to see locked targets on the helmet mounted sight?
Raptor9 replied to Galwran's topic in DCS: AH-64D
Where I think most people tend to get into trouble is equating single-pilot aircraft with a two-pilot helicopter. The idea with all that symbology is to help keep the single-pilot focused outside the aircraft because they are flying the aircraft. But the CPG's job is not to fly, it is focused on the sensors and the weapons. Think of it like the F-15E WSO. He doesn't have a JHMCS, but he has four displays in the backseat to allow him access to as much data as possible while the pilot flies the aircraft and maintains situational awareness around the aircraft out the window. The AH-64D CPG is the same thing, with 4 displays (2x MPDs, TDU, HDU), one of which, the HDU, he can maintain focus on while looking at any other items in the cockpit like the MPDs or the kneeboard. Yes, the CPG should not ignore the visual scene out the window, and he can easily cue the TADS to where he is looking with his helmet, but again, comparing the AH-64D to "how the other single-pilot aircraft do it" is missing the point. -
How to see locked targets on the helmet mounted sight?
Raptor9 replied to Galwran's topic in DCS: AH-64D
It comes down to the fact that the Pilot is the crewmember responsible for maintaining overall awareness when the CPG is "looking through the soda straw." When the CPG is using the TADS, their focus is where the TADS is pointed in time and space, which is why they have the Heading Tape chevron, Field-Of-Regard box and the TSD to maintain situational awareness of where the sensor video they are looking at is in relation to their aircraft. If you are close enough to enemy aircraft or ground targets like tanks and armored vehicles where you are trying to visually keep track of them, you are probably too close and should be thinking about getting out of there to a safe distance, but that is of course the Pilot's job. I get that this is a simulation and that often times we are flying by ourselves, but to understand why the systems are the way they are, or the way they aren't, it helps to understand how the different crewmember's have split responsibilities. -
reported FCR bearing/range is showing wrong data, time to go is dead
Raptor9 replied to Rongor's topic in Bugs and Problems
To follow up on this. The issue with the Time-To-Go has been reported. The "061 28" data field on the FCR is correct-as-is, in that it reports the bearing range from the steerpoint to the FCR cursor if Bullseye isn't enabled, or bearing and range from Bullseye to the FCR cursor if Bullseye is enabled. This is the same behavior on the HSD and the FCR when in an air-to-air mode. You will however get a bearing/range displayed on the MFD from your ownship to the FCR cursor if you enter Freeze mode, either manually or by entering Fixed Target Track. -
The Snowplow behavior is being corrected. The manual is undergoing revision as well to bring it up to date with the F-16 module as well as the refinements being made to the Snowplow mode and FCR behavior. These changes are still ongoing and I cannot provide details at this time.
-
reported FCR bearing/range is showing wrong data, time to go is dead
Raptor9 replied to Rongor's topic in Bugs and Problems
It means the manual is undergoing revision, to include the FCR chapter.