Frederf
-
Posts
7593 -
Joined
-
Last visited
-
Days Won
3
Content Type
Profiles
Forums
Events
Everything posted by Frederf
-

missing health bar indication Is the GBU-38 damage model accurate?
Frederf replied to Fulgrim's topic in Weapon Bugs
Can you show the health bar after that? Without that info it's impossible to see partial damage visually. That is a rather distant impact for total destruction at least in DCS terms. -
I think minimum number of devices. With 128 buttons and 8 axes and POVs you may not be able to get all functions on one device, mostly due to axes. If you can bind VKB device directly then you only need Vjoy for special programming assignments which can be much less.
-
Manually move the control surfaces through their entire range before running the test.
-
Unfortunately the simulation does not allow this practice.
-
Just ARC is on, but the distance is counting...Hm?
Frederf replied to loscsaba86's topic in MiG-21Bis
"Should" is an interesting concept. It can be used and there is a whole chapter in the manual using it as such, at least while doing ARK navigation. It has the qualitative technical ability. Is it a good idea or it it practical? I dunno. RSBN is a DR-only system in technical capability. Does RSBN have DR-only capability operationally? Not sure. If you have the L-39 module you can test it out. It worked good enough for me in my test flight to get me within homing range of the destination outer beacon even at max range flight with no midcourse updates or ground visual reference. The A-4E has a similar DR system. Granted it does have an optional Doppler system and the ability to set in a wind adjust component but that's close to apples to apples and that system is designed for DR flight for hundreds of miles. I'm curious how the counter works with the ARK system like maybe the azimuth component gets bypassed so it assumes all motion is radial inward. The instruction in the manual for using the distance counter with ARK don't mention adjusting the azimuth component. -
SRS's radio overlay ui feature. EDIT "toggle radio overlay" button on the General tab of the client.
-
Unfortunately the automatic LOS slaving in the F-16 isn't working perfectly right now. Namely slewing SPI with HUD/FCR should automatically break TGP track and cause it to slave to this SPI but it doesn't. You need to trick the TGP into updating its LOS to the SPI by cycling the sighting point.
-
need track replay How to select the next Hellfire to fire?
Frederf replied to Devrim's topic in Bugs and Problems
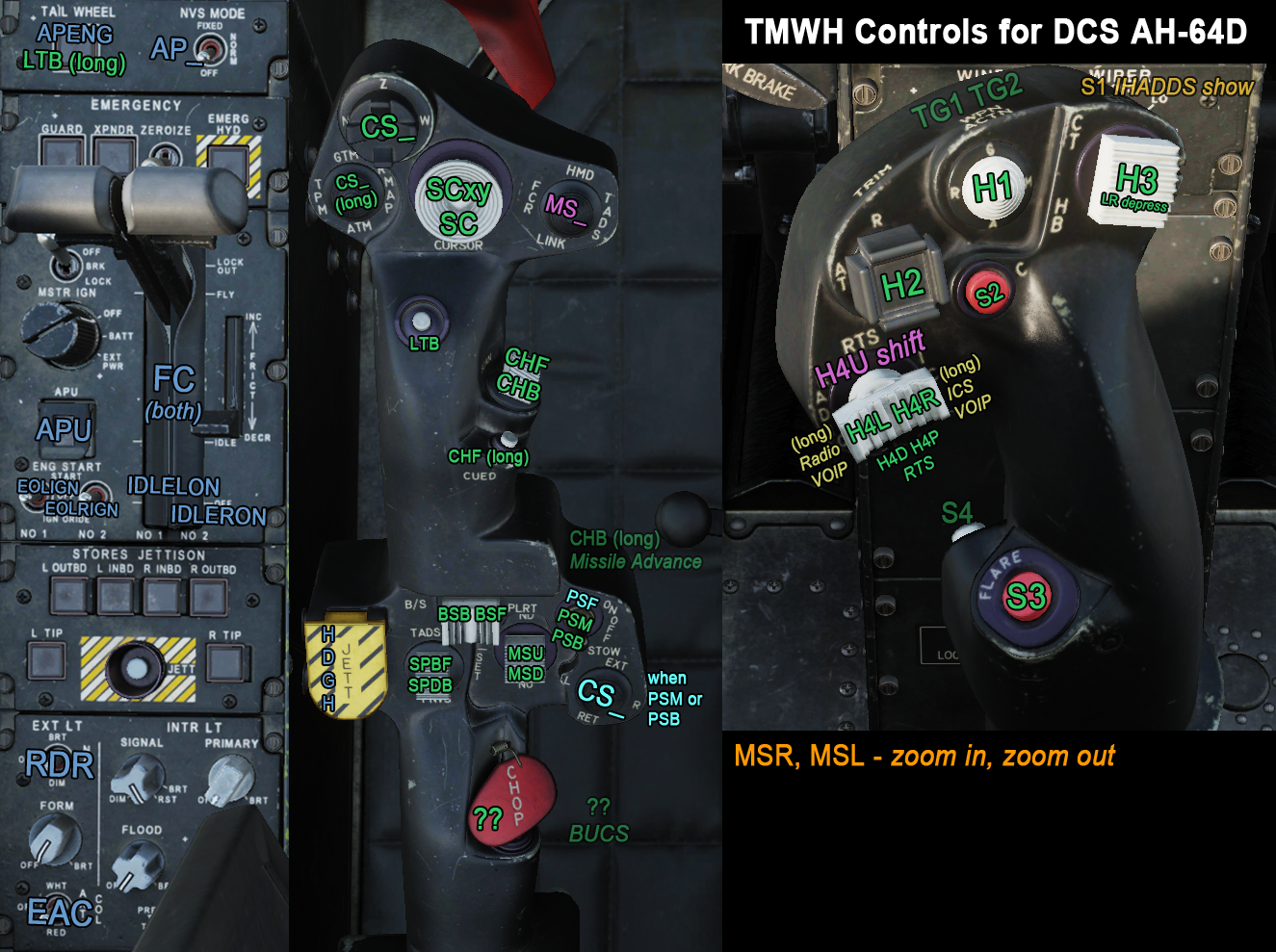
Set fire mode to manual and use the missile advance command on the collective (or TEDAC but there is only collective button today). I think it should be possible to change the weapon inventory to reflect the lost/failed missiles. I'm sure this is quite an unexpected thing for George to be expected to deal with. It's a fun scenario to think about. -
Just ARC is on, but the distance is counting...Hm?
Frederf replied to loscsaba86's topic in MiG-21Bis
Here is section from pilot's operating instructions describing RSBN use both with and without signal. The DCS MiG-21bis does not operate as it does in reality. It will "coast" during signal dropouts but the operation of the spring-loaded azimuth and distance switches (for manually setting these values) does not function as it does in the real airplane. The DCS L-39 has similar RSBN equipment which does have much better modeled equipment that can be used with occasional or no signal from ground stations. I have highlighted appropriate sections of the MiG-21bis and L-39 flight manuals. I try to find L-39 instructional video that demonstrates no-signal navigation but I haven't seen one. It does have the ability but it is not a popular topic. I have done it in the simulator successfully. The DCS MiG-21bis module does not simulate the ability so this knowledge is academic to the DCS user. MiG-21bis PFOI Section Six Air Navigation.pdf L-39 RSBN Section.pdf -
That would be the operative sentence in the -34 too. Those "change log" type documents are written sourced from the -34s as evidenced by the same six lines in the same order. That's as good as one is going to get out of an operating manual. For a persuasive inductive (not deductive) argument I point to the az/el mode which shares the same "is stabilized" description. Only adjustment by slewing the cursor control changes the relative position of the helmet/HUD symbols. Yaw and pitch of the helmet doesn't. Roll is the same.
-
F-16C and GBU-10 Laser Guided Bomb release methods
Frederf replied to Top Jockey's topic in DCS: F-16C Viper
The basket is simply the range of acceptable delivery trajectories which can be steered onto target by terminal laser guidance. Naturally it applies to DCS as well. PWII can be lofted but when the laser guidance happens is important. The bomb can't see the laser unless it is pointed at it with some angle, say 20 degrees. Until the arc of the trajectory has hit its maximum and starts to rotate down the laser is irrelevant. If the laser is on target as the spot comes into view of the edge of the seeker and not the middle. PWII seeker only has two steering angles: 100% pitch down or 100% pitch up (left/right same thing). The seeker itself only has two sides per axis. It can't tell if laser is 0.1° off center or 19.9° off center. The is also traveling relatively slowly at this point. The result is that the bomb steers toward the laser 100% effort until it is seen on the other half of the sensor. A large angular velocity develops during this initial turn and overshoot wildly. The bomb will take longer to settle around the LOS back and forth. Instead if the laser is delayed the bomb is already pointed more closely to the target and the oscillations are smaller producing less drag. Also any guidance produces drag and non-parabolic trajectory which are both energy reducing so the shorter the better. Medium altitude toss (MAT) is the longest-range possible delivery kinematically be it Mk 82s or GBU-12s. The ballistic phase ends where terminal phase begins. PWII terminal phase is usually worse kinematically than ballistic so minimizing that phase improves overall energy. JDAM is an entirely different weapon because it flies like an airplane optimizing its glide range. -
Just ARC is on, but the distance is counting...Hm?
Frederf replied to loscsaba86's topic in MiG-21Bis
RSBN is a non-signal dead reckoning system similar to Doppler. The inputs are true airspeed, true heading, and pitch. You can fly a whole mission by RSBN reference without external signal. -
By slewing with the radar cursor. The point of calibration is that the helmet symbology is projected accurate to the outside world. The pilot's head "zero" is irrelevant. This isn't like TrackIR where centering is an event that assumes a particular orientation. We're smoothly adjusting a control until two images agree. The dx dy calibration already embodies this concept. As you're adjusting agreement it doesn't matter if you yaw or pitch your head wanders. The alignment marks appear fixed relative to the HUD marks by compensating for head motion.
-
Everything is documented somewhere. I haven't seen it. The endpoint height being different source is the linked thread so take that for what it's worth. The similar idea in the other plane is from my memory bank. The guidance to any endpoint I would assume would be fuel saving but it could be tactical (kinda weird as a FPAS function).
-
My understanding is that this is normal for TACAN profile to leave you high over the facility and is intentionally different than the waypoint logic. It's for a flameout landing or instrument approach or something like that. The idea is when you're coming back that low on fuel you want the assumed safety of entering in a high overhead pattern. F-16 does the same thing on the HOME profile, 5,000' over home plate, not 0. The descent profile on the other hand I would think would be near the optimum minimum fuel trajectory. I don't understand why following that guidance would be so steep.
-
Just ARC is on, but the distance is counting...Hm?
Frederf replied to loscsaba86's topic in MiG-21Bis
In reality RSBN works without signal as a dead reckoning position keeper. Module doesn't quite recreate it. For a better simulation of this system look to L-39. -
The idea is that the helmet should have the ability to put the helmet + over the HUD + at any helmet angle with a good calibration.
-
Are we closer to the definitive warthog profile?
Frederf replied to nick10's topic in Controller Questions and Bugs
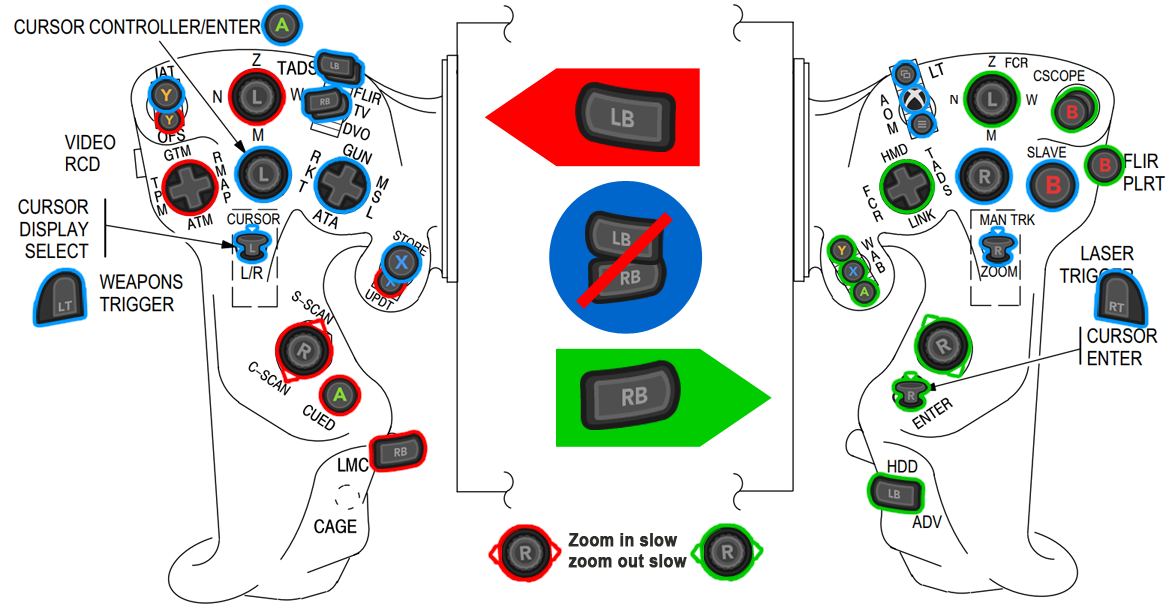
I have a 128 button Vjoy profile that includes an xbox controller for TEDAC. Cutely the button numbers are sequential alphabetically through the control list. Device 1 is 8 axes, 64 buttons, 1 POV (continuous) Device 2 is 8 axes, 128 buttons, 1 POV (continuous) Device 3 is 0 axes, 8 buttons, 0 POV <-- Just used to do long/short commands with the POV hat as a loopback input AH-64 v1 64 TEDAC v2 128 Cyclic Collective Panel Other.xml
-
I only refer to the roll alignment calibration symbology. The +'s shown during that process.
-
No, the symbology is attempting to draw a vertically deposed set of symbols in the cockpit frame of reference. The calibration is to make agree the displayed vertical and the actual vertical. As the helmet tilts 1-2-3-4-5-etc. degrees the symbology in the helmet frame of reference tilts 1-2-3-4-5-etc. degrees the opposite way. If the roll calibration is of X degrees then it will be displayed that constant error at any helmet tilt angle. The relationship will be 1:1 with a delta angle. Calibration's purpose is to make that delta angle zero.
-
OK, no Steam. Then the first link is applicable to you. You should be able to decline the update, go into module manager, deselect/uninstall the desired terrains, and then proceed as desired.
-
The point is if the pilot tilts his head the symbology displayed shouldn't change at all relative to the cockpit frame of reference. The fact it does is a bug in itself.
-
It's just a restatement of what you said, nothing new. Bytes are cheap. I would save the moderator effort and make a new post with as few words as possible to describe the issue. For example "movable roll alignment mark moves with pilot head tilt". Many more words than that risks confusion.
-
MAN means manual threat entries for the HTS. When there are entries in the table OSB2 will have "MAN" label and can be selected as the "12th Class". Entries on the HTS MAN page are searched for if MAN is highlighted on the THRT subpage. F-16 HTS Manual Entry.trk https://forum.dcs.world/topic/289473-hts-ded-page/
-
Your antenna elevation is pegged to the minimum. The little blue T on the left side is low and the altitude at cursor range are -40 and -70 top/bottom.