Tanuki44
-
Posts
596 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Tanuki44
-
Ok, If anyone has a procedure for crash to 100% at the 2nd mission ... In my case, the craches are less frequent than before, it becomes difficult to search... (changing mission, terrain..)
-

MMJOY2 / MICRO PRO / Delete Firmware
Tanuki44 replied to Mero-Mayhem's topic in PC Hardware and Related Software
On different sites, we can read: don't use the currently latest version (at the moment that'd be v20161101), it's bugged. Use the previous one instead (at the moment v20160818upd1). Without ever succeeding to know what bugs ... -
It would be nice to have other feedback on page file settings, Today again, no crash after several mission changes....
-
New change? Collective in mid position on spawn?
Tanuki44 replied to Andurula's topic in Controller Questions and Bugs
I do not have any what you describe, perhaps related to the firmware of your equipment. The only problem encountered is the Trim that is not zero in 'start in flight' -
MMJOY2 / MICRO PRO / Delete Firmware
Tanuki44 replied to Mero-Mayhem's topic in PC Hardware and Related Software
Ahhh, you posted faster than me -
MMJOY2 / MICRO PRO / Delete Firmware
Tanuki44 replied to Mero-Mayhem's topic in PC Hardware and Related Software
You do not need to re-flash the firmware 'MMJOY2' for change the VID/PID, When the stick is blue : - Load sets from device - Change your VID / PID and the Name - Save sets to device and that's all unless you have already flashed another firmware, in that case, you must redo the complete procedure pro-micro-firmware-instructions.pdf -
If you use MMJOY2, why not change the vid / pid in this app ? Have you re-flashed the MMJOY firmware in your PROMICRO ?

-
keybinding for artificial horizon reference line setting?
Tanuki44 replied to lwalter's topic in SA-342M Gazelle
I just discovered this tool, great work -
New change? Collective in mid position on spawn?
Tanuki44 replied to Andurula's topic in Controller Questions and Bugs
During start 'in flight', I noticed that the trim is not necessarily at zero, this automatically leads to a crash. As a precaution for all missions starting in flight, I make a trim RAZ at starting. -
keybinding for artificial horizon reference line setting?
Tanuki44 replied to lwalter's topic in SA-342M Gazelle
That's how I found the commands for Art / Vis / Vhf / Dop -
I modified my page file from this post : and CTD were more difficult to obtain... hazard ???? How could we test differents memory management?
-
keybinding for artificial horizon reference line setting?
Tanuki44 replied to lwalter's topic in SA-342M Gazelle
I think that's the commands for Art / Vis / Vhf / Dop Source + Source - in Main Panel -
Even with an SSD, advise you to customize size of page file?
-
In my case, all missions (v2.5 or v2.5 [re-save in 2.7 editor] or v2.7) including the acting times in 2d.
-
Landing light switch only recognises 1 button
Tanuki44 replied to Cowboy10uk's topic in Controller Questions and Bugs
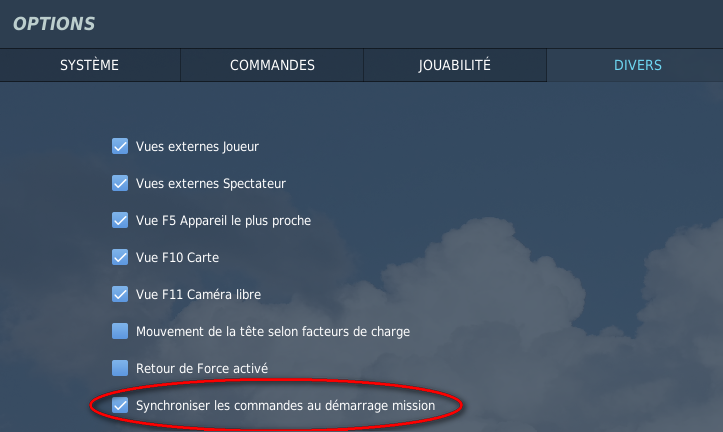
Fully agree for separate commands for switches (this already exists). At startup, synchronization of axes and switches would be simplified, toggles do not allow it. Some missions position switches automatically to help the pilot. During a mission, to correct this 'gap', it is possible to use an unassigned 'modifier' to this switch to put it back in place with no effect on this command. -
Landing light switch only recognises 1 button
Tanuki44 replied to Cowboy10uk's topic in Controller Questions and Bugs
I'm not sure that I understand the question... The switch of my collective has two positions ON and OFF, these two positions are recognized by DCS like two virtual buttons (BTN15 and BTN16), but it is possible that it is linked from firmware MMJOY. I setted the landing switch with these two virtual buttons, so it works like a toggle.
-
New change? Collective in mid position on spawn?
Tanuki44 replied to Andurula's topic in Controller Questions and Bugs
Have you checked the box in the Options to synchronize commands when starting the missions?
-
Yes, but flying with a short joystick or a replica of a true cyclic is different in the settings because of the amplitudes of movements.
-
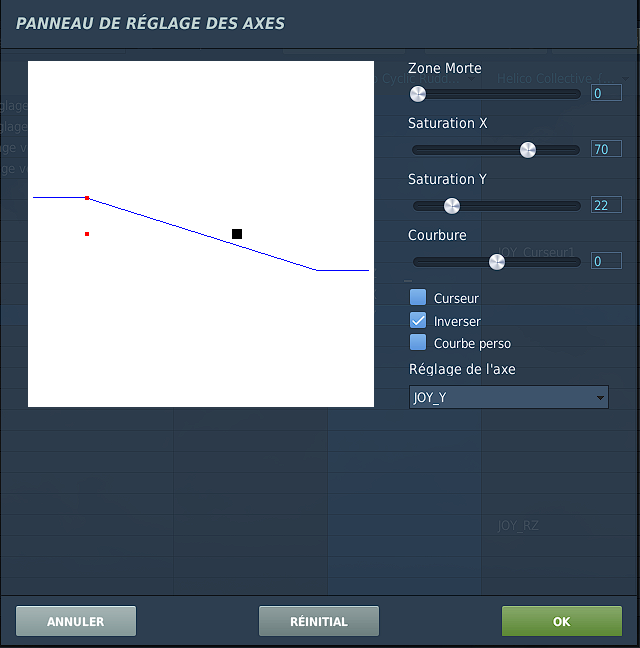
This is an example for pitch or roll : My Cyclic mechanical course : -35° to +35° for 100% in Windows Joystick manager In RealLife Cyclic course is : -10° to +10° Setting Saturation X to get the most cyclical when it is positioned at + or -10°, (here 70 is the value that corresponds to 10°) beyond this position the value will not exceed 100% Saturation Y is used for the sensitivity of the Cyclic, depending on the sensors and hardware, which may explain that 100%, Gazelle is uncontrollable In the case of my cyclic, Saturation Y cannot exceed 25%, beyond it's flying on your back constantly. In summary : Saturation X = Amplitude Saturation Y = Sensitivity Then everyone settles to their liking
-
The deadzone is on center of the joystick, but the equilibrium of the helico is never on the center, I preferred to let 0.
-
The sensitivity of the roll and pitch axes can be adjusted by decreasing the saturation Y value, it is by testing that you will find what the most correspond to your hardware and your sensations of pilot in real life. A topic here :
-
At home, the 3 : SSAA SSLR SSAO are setting 'Off' and crashes continue....
-
Do you use MMJOY ? if yes, we must setting a PID / VID different for each device if not, (it's your own soft), you need change the device PID/VID and Name by yourself In "arduino-1.8.13\hardware\arduino\avr\board.txt" for exemple, if it's a ProMicro : micro.name=Arduino Micro micro.vid.0=0x2341 micro.pid.0=0x0037 micro.build.usb_product="xxxxx" for the name under W10 I have never had the worries because all are programmed and modified with MMJOY except one. I hope this will help you.
-
I started on 5/10 and no crash since, unless I disable compatibility, but this is only a solution in the meantime.
-
Have you setting the Win8 compatibility on DCS.exe and not on DCS_updater.exe ?