kablamoman
-
Posts
427 -
Joined
-
Last visited
-
Days Won
1
Content Type
Profiles
Forums
Events
Everything posted by kablamoman
-
The Leaning Tower of Ford!
- 1 reply
-
- 1
-

-
Granted, it's at a much lower speed than 130 mph, but here is an example of a real player doing exactly this (and it's quite funny to witness): oops.mp4 Perhaps the modules are more forgiving than their real-world counterparts, but I definitely do find that the relationship you're talking about when making comparisons to the jets in the sim is definitely there. The jets are far simpler to control with their centerline thrust and their fly-by-wire as you progress through the roster in the sim from older to newer. Perhaps your experience makes it seem quite easy for you to fly the older warbirds -- but throw someone new to flying into the sim, and they similarly struggle like the poor chap in the video. Overall, I think DCS does far better a job than any other sim I've played at modeling these things, and I think it's a bit unfair to call them poorly modeled.
-
Probably the most accurate assessment of the issue I've read. I would agree with everything you've said. Really hope they give some time to the problem. The dots at extreme distances varying with resolution seem to have been addressed fairly well by that user modification they locked away behind IC. Hopefully they will put their own solution on a fast track. I think the issue with mid-range spotting is a pretty tough one to address, though. So much of spotting in real life is learning to focus your eyes properly (something we can't really do with current display tech), and so any solution that tries to emulate it might be an arbitrary kludge. I do think there is something going on with the lighting, as you say, and maybe the texture filtering used by the renderer that could be improved -- as it stands now aircraft blend into the background scene in ways that unnaturally mask them. I also hope they add some mechanism to render glints of reflected sunlight off of shiny aircraft surfaces and canopies, and fix the problem of contrails de-rendering prematurely at distances where they should still clearly be seen.
-
Just a note to say I know at least the Dora is affected by the same problem.
-

investigating Cannot calibrate Gyro with Mag Compass
kablamoman replied to Nealius's topic in Bugs and Problems
@=475FG= Dawger So just assuming maybe they've modeled it as a traditional wet compass... Playing around with it a bit more (latest MT build) it becomes really pretty confusing. It looks like the errors in question don't behave like traditional magnetic compass acceleration errors at all. That is to say, there's an error element based solely on tilt angle even at zero acceleration. You can be stationary on the ground, or unaccelerated while holding a pitch attitude (nose high or low) and see that the error is directly correlated to the deck angle. A wet compass should only really be inaccurate for periods of acceleration, such as in a turn or during speed change -- these situations will both displace the fluid dampened pendulum or float device from level relative the earth -- but once the float stabilizes level to the horizon (eg. on the ground; in an established, unaccelerated climb or descent; level, but at low speed with a nose-up attitude; etc.) the errors should largely subside. Unless of course your attitudes are sufficient enough that the physical casing starts to impede free rotation -- but as mentioned in the above document, the float in this case, should be freely rotating up to +-20 degrees of attitude change. It's as if they've modeled it as a free-wheeling sensor that rotates freely about the normal/vertical axis (and will happily seek out magnetic north, if it's steeply inclined along this plane of rotation), but they haven't modeled the "float" part, that should largely correct for inclination at modest deck angles. Regardless of sensing aspect of the instrument, I don't see how this behavior can be accurate. -
investigating Cannot calibrate Gyro with Mag Compass
kablamoman replied to Nealius's topic in Bugs and Problems
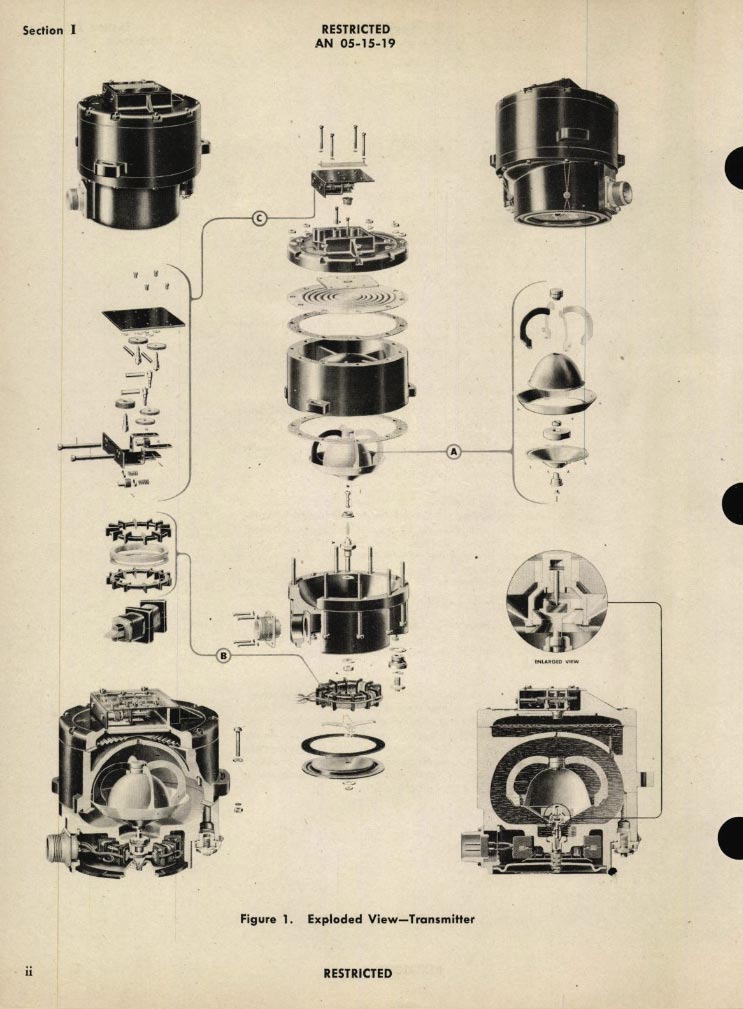
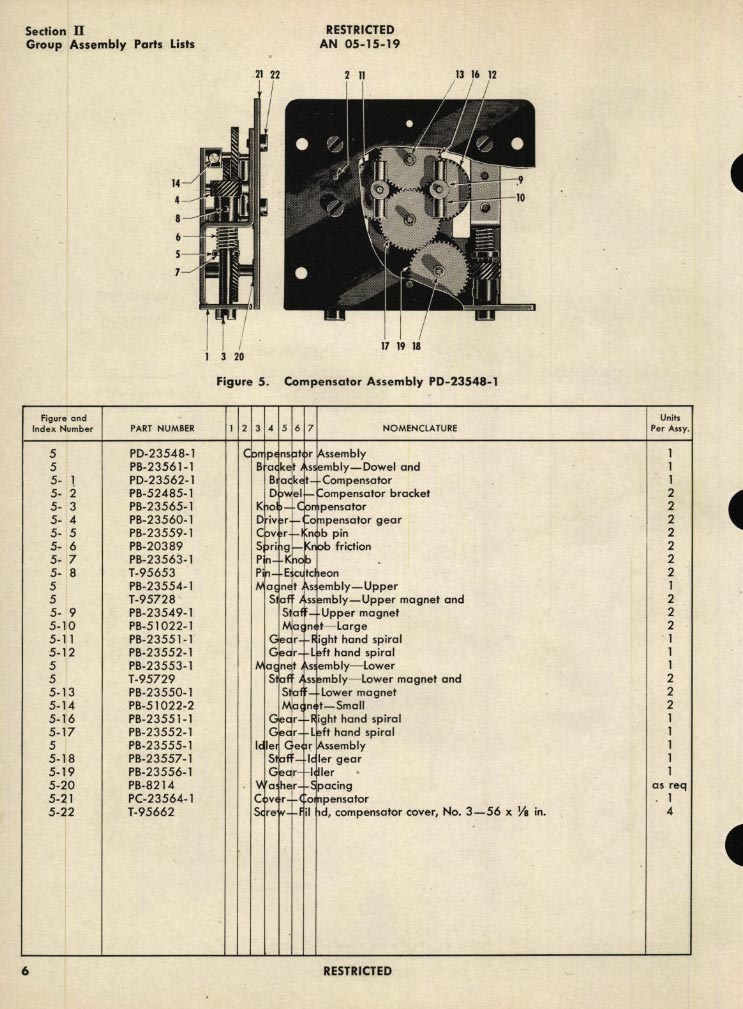
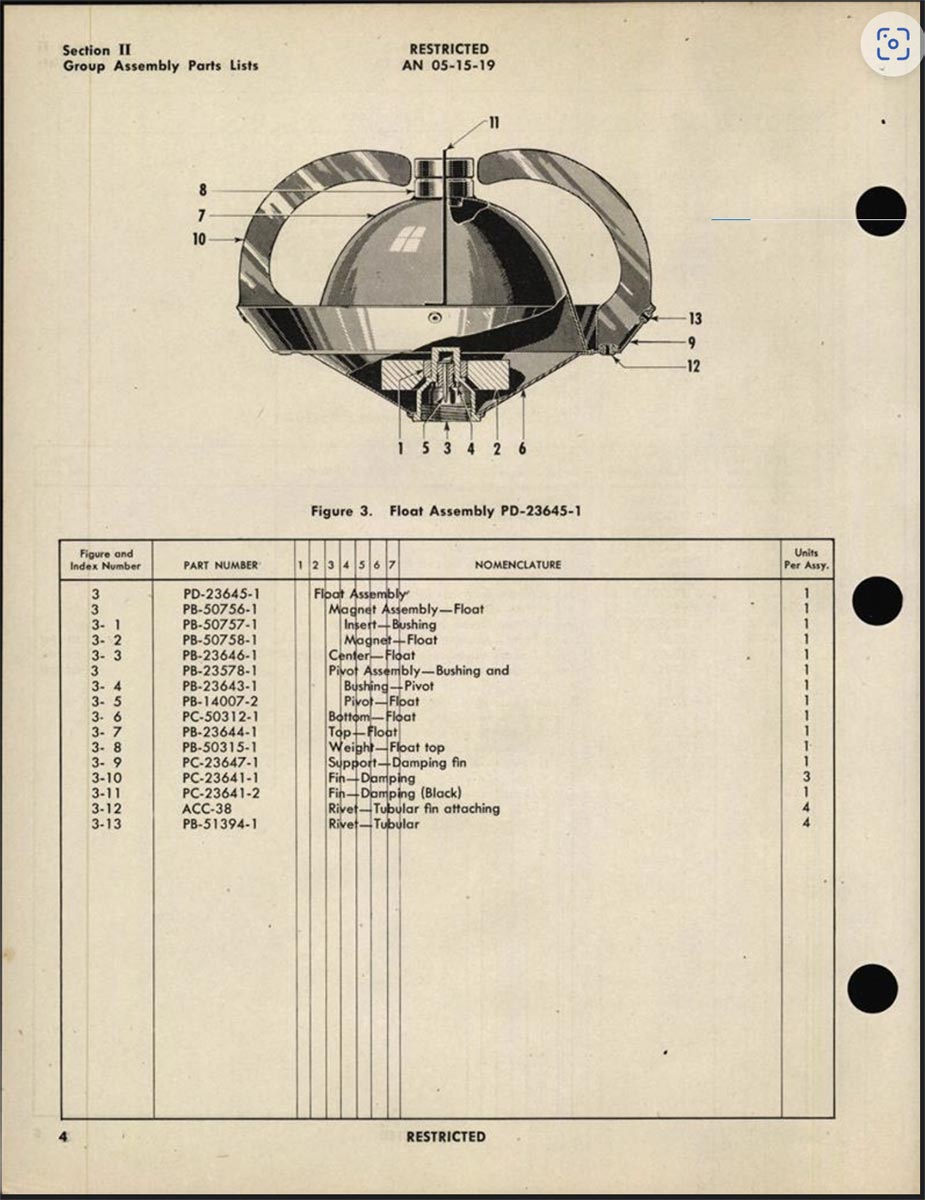
It's still unclear to me if the flux gate in the assembly is used to actually sense the earth's magnetic field (suspended from the float as a pendulum to keep level), or if it's being used simply to generate electric signals from the float, which would be doing the sensing. I am leaning towards the latter. In any event, some additional information that may be helpful comes from a partial manual I found that describes the testing procedure, specifically the tolerances for tilt error on the AN 5730-3 remote sensing unit: The section mentions that a tilt about any axis of 10 degrees should not result in a reading change of more than 6 degrees. The ~25 degree error when sitting on the ground (about 12 degrees, nose up), as in OP's original example, really does seem to be excessive.
-
investigating Cannot calibrate Gyro with Mag Compass
kablamoman replied to Nealius's topic in Bugs and Problems
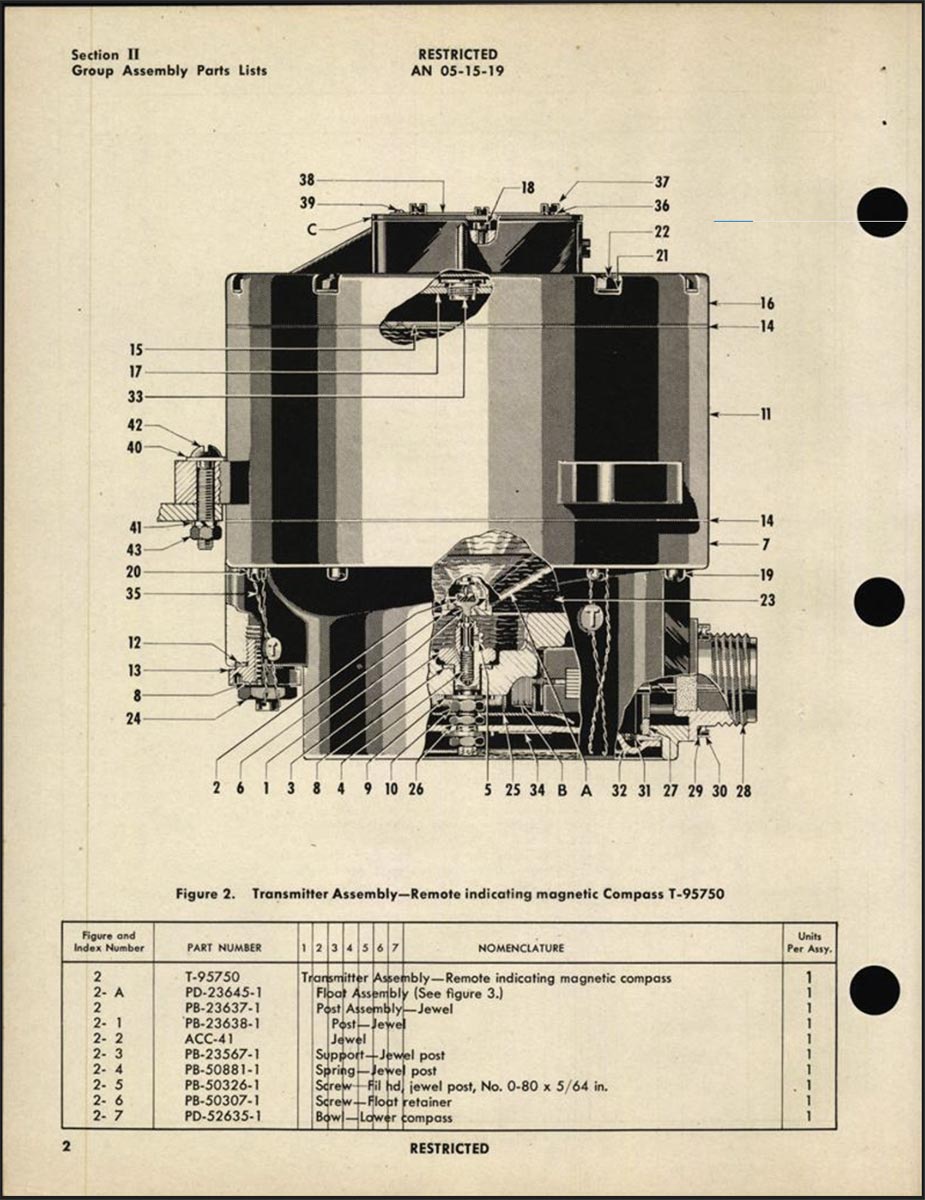
@=475FG= Dawger That's what I had been assuming as well, but after poking around a bit and reading the manual description: I started to wonder, and when looking through some documents, this popped out to my eye in the parts list for the sensing unit: (unfortunately I did not have the entire manual) However, your comments made me even more curious, so I actually paid to download the full copy of it and here are some of the missing pages: So I think it's at least worth a closer look.
-
investigating Cannot calibrate Gyro with Mag Compass
kablamoman replied to Nealius's topic in Bugs and Problems
@NineLine After a bit more searching it looks like the p51 remote compass sensing unit was indeed suspended in fluid to correct its attitude relative to the horizon. The inaccurate readings due to the vertical component of the magnetic field lines when pitched up, down or banked relative to the horizon (easy to demonstrate by flying a heading, and then pitching up or down and holding that attitude, or simply being wheels down on the ground) do not seem like correct behavior for this instrument and may be worth looking into. Some references attached:
-
investigating Cannot calibrate Gyro with Mag Compass
kablamoman replied to Nealius's topic in Bugs and Problems
An addendum: Some of these types of systems used gimbals or fluid to help stabilize the sensing units relative to the horizon. It is unclear to me if the unit in the p51 had this kind of functionality (I think some in the German birds used a gimbal stabilized sensing unit, along with some in American bombers), or if it was less sophisticated and would have been susceptible to this type of error as depicted. The behavior in the game at attitudes other than straight & level may not be entirely correct, but I'm guessing that's how they've chosen to model it, and so flying straight & level is what you have to do to get an accurate reading. -
investigating Cannot calibrate Gyro with Mag Compass
kablamoman replied to Nealius's topic in Bugs and Problems
@Habu_69 I just had an opportunity to go check on this. I can confirm my compass was correctly reading 065 degrees magnetic, flying straight and level, in line with runway 6 at Bazenville on the updated Normandy map. This was exactly correct for the runway, based on the course measuring tool in the map view. However -- and I think this is what's tripping you up -- when on the ground the compass reads inaccurately and shows 090 as you describe. Ostensibly, this is because the fluxgate in the wing (described as an electronic remote compass unit in the manual) the instrument uses is still susceptible to inaccuracies due to the vertical component of the magnetic field, similar to magnetic dip in an old-fashioned whiskey compass. This is because the fluxgate is no longer flat relative to the horizon as the aircraft's pitch attitude is nose up when on the ground, and so the vertical component of the field lines introduces error. Long story short: You have to be flying, straight & level -- not in a climb, descent, or a bank -- to get an accurate reading on the compass in order to set your DG. -
investigating Cannot calibrate Gyro with Mag Compass
kablamoman replied to Nealius's topic in Bugs and Problems
If your compass is showing the wrong magnetic heading that is its own issue and has nothing to do with the DG. I'd double check your mag heading by using the info bar in an external view to check -- if I am remembering it should tell you what your actual heading is (magnetic and true), make sure you're flying straight and level and then cross check that with what's being shown on the compass. If it's still out to lunch it's a bug with the compass, I would say. -
investigating Cannot calibrate Gyro with Mag Compass
kablamoman replied to Nealius's topic in Bugs and Problems
The two instruments are not connected. You are the one that has to match the DG to what you're reading on the repeater compass. The DG could be working just fine but be out 180 degrees if you haven't set it properly. If you notice it out 30 degrees, that's when you fly straight and level (so the compass reads accurately), press the knob below the DG, twist it until the numbers match, and then pull the knob out again. -
investigating Cannot calibrate Gyro with Mag Compass
kablamoman replied to Nealius's topic in Bugs and Problems
Your gyro is dumb and needs to be regularly set to match your compass. It doesn't sense direction, it can only sense your aircraft's rotational acceleration, and it uses that to show you a change in heading. You have to set it to match something (your compass), and it'll constantly drift out of sync from where you set it. Even if it could hold a heading perfectly, the earth rotates around it and will cause it to read inaccurately eventually. To give you an idea, DGs can be expected to drift 3 degrees every 15 minutes, even working perfectly. To make matters worse, the more you maneuver, the faster it will drift. So, if you're trying to navigate and turn to accurate headings, it's probably best to fly straight and level first to get an accurate reading from your compass, then match your DG (don't forget to uncage it once you've set it) before you use it to turn and roll out accurately at your desired heading using the gyro. -
no bug Gun sight fold/unfold stuttering
kablamoman replied to skywalker22's topic in Bugs and Problems
I think OP may just be referring to the animation itself. The gunsight stowing in the 109, along with the canopy opening and closing all seem to be animated at a low frame rate with no smooth interpolation -- so they look visually stuttery compared to the rest of the game when it's running at higher frame rates. The same happens with other animations like the spitfire's side door and all the bailing out animations. -
It's a bit of a bug that seems to affect most or all of the warbirds.
-
I don't think it's just the K4, several other warbirds are affected. The other issue is that it happens in clear air as well. Until they can revisit the simulation for the atmospheric conditions that lead to icing (flying through cloud or precipitation in specific temperature ranges), I think they'd be better served to simply turn off this effect entirely.
-
51 refresher after a couple years... questions/misremembering?
kablamoman replied to pchRage's topic in DCS: P-51D Mustang
Wing drop during a stall is really an indication that one wing stalled more than the other, probably due to unwanted slip. I suspect you could probably use some more right rudder to mitigate the wing drop a bit (but the real solution is to not pull so hard). It's a neat experiment to pay attention to the ball and to try stalling with it left, center, and then right, to see how the wings behave in terms of roll moments generated. -
That is the thermostat control. You're not manually setting the cowl position, you're selecting the temperature the system will try to automatically regulate. There is really no good reason to mess with it unless you wanted it to purposefully regulate at a lower temperature, which would mean more drag and less performance, as they work fine at the default setting and the cowl flaps will actuate the same amount, it's just that they wait until temps get a bit higher before they do. It's been a while since I've flown the module, so I don't remember the specific range, but I think by default it will try to maintain 100 degrees (which you can run continuously), and if you turn the knob fully towards the cool position it'll try to regulate at 70.
-
I don't believe there is manual control of the flaps, only a thermostat where you can select the temp it tries to automatically regulate. Not that this sheds any additional light onto the issue, I only mention it to help clarify.
-
This is something that isn't always that well modeled in sims, and even though it's actually pretty good in DCS, it can still be hard to get a feel for it without force feedback and a bit of "seat of your pants" feel. That said, a good way to think about it is that you should really only need to modulate your rudder pressure in coordination with your aileron input. So, when you're rolling into, and when you're rolling out of turns. Once your angle of bank is established you ease off the rudder the same way you ease off the aileron input. Another thing that may help, and I find actually works fairly well in DCS (like in real life) as opposed to some other sims is to *not* focus on the ball too much. You can check the ball once in a while when you're in level flight or after power changes just to make sure you're in trim, but don't use it as your primary indicator for rolling into and out of turns. Instead look out front and use a reference point around which your attitude should roll. The reflector gunsights in the warbirds are usually pretty good references for this. The idea is to keep the point of the gunsight fixed in pitch and yaw as you roll into and out your bank. Use just enough rudder input to make this happen.
-
requested Proposal for VR head limits implementation
kablamoman replied to kablamoman's topic in DCS Core Wish List
My motivations: Personally, it strikes me as an extremely “janky” and poor VR implementation after having experienced other ways titles have handled clipping issues in VR. It reminds me of some of the first rudimentary titles you’d see in the early days of PC VR, where there was a lot of fear and dogma surrounding the issue. As devs and players got a bit more comfortable with the medium, the old “do nothing and just let the user clip through things unimpeded” method — a kind of lazy non-solution, in my eyes — started to give way to more robust solutions with proper comfort options. That’s my main motivation as someone who enjoys VR immensely. As for the cheating aspect of it, I would put the unrestricted cockpit boundary in VR on the same level as using external views — something some sim pilots argue should be available at all times, for varying reasons. Nevertheless, server operators can and do sometimes restrict the use of external cameras as they see fit. I would request that the same be allowed when it comes to poking your head through canopies. I think something special happened to simming with the advent of 6 DOF headtracking — suddenly playing from inside the cockpit without needing external views became very feasible. It wasn’t perfect, and nor is VR, but I do see the latter as a marked improvement in almost every way when it comes to simulating what it’s like to actually fly in an aircraft. I think it deserves some more consideration when it comes to how it’s actually implemented and integrated into the sim to enhance the overall experience. As to the specifics of the implementation (eg. how far can you push through before it affects your visibility; what cues the player receives; etc): I leave that up to the devs and testers to iron out, trusting that they wouldn’t be satisfied with mechanics that would be a step backwards, and that they wouldn’t remove options that we already have and enjoy. -
requested Proposal for VR head limits implementation
kablamoman replied to kablamoman's topic in DCS Core Wish List
I agree. I think there is a lot of room for innovation there that dovetails so well with the concept of a simulator. The suggestion you had about an audible bump sound is something that could work very well as a subtle, but also powerfully immersive and effective cue that you are about to exceed a boundary. I can also imagine the sound simulation feeding in more bass frequencies if the player's tracked head was in contact with the canopy as well. Other ideas such as blurring vision may well end up doing a better job than a pure fade-to-black ever could, and I would be just as happy with that. It should go without say that a good implementation should take into account all the variables you mentioned, to achieve the best outcome according to player preference. -
requested Proposal for VR head limits implementation
kablamoman replied to kablamoman's topic in DCS Core Wish List
I hear what you're saying about your actual physical movements being unimpeded, so I understand what you mean by saying it can be less immersive for you (I don't personally agree), but the actual result in-game is the key factor that we don't get in DCS. Because you can pop half or even all of your head out into the slipstream in DCS -- and invariably do so by accident -- factors that should affect aircraft in the sim like visibility being limited by armor plate or canopy shapes and frames are less a factor. Whereas in the other sim, you can strain all you like, but you often can't get your head out far enough to achieve tally without having to maneuver. The result of this is that different canopy selections or options for armor plate (or lack of it) actually have real tradeoffs with benefits or consequences. My own personal experience flying online (in the other sim) is that there have been many times where I was bugging out, with bandits hot on my tail in a deck chase, wishing I could see more behind me (or lamenting the fact that a bubble canopy was not available in the mission), but also not willing to slip or help the bandits cut the circle with even a small turn. A lot of times you don't dare look back until you get back to friends in the air or on the ground -- in DCS, this doesn't happen because you can just poke your head out back and look yourself. And as you mention, when it comes down to it, if one does not want to bump up against the limits, whether hard, soft, or just the jarring visual and auditory effect of your head sticking out into the air -- one simply doesn't. All I want are options, with comfort left up to the client (nobody being forced to decide between playing and being nauseous), and server operators able to decide for themselves what they want to allow on their server in terms of people exceeding those limits. -
requested Proposal for VR head limits implementation
kablamoman replied to kablamoman's topic in DCS Core Wish List
Seems to me, we're in agreement. -
requested Proposal for VR head limits implementation
kablamoman replied to kablamoman's topic in DCS Core Wish List
I still don't understand why there is any discussion at all about nausea inducing effects -- nobody is advocating that a hard translational limit be imposed on any player, whether offline or otherwise. It's a moot point.