PilotMi8
-
Posts
4541 -
Joined
-
Last visited
-
Days Won
4
Content Type
Profiles
Forums
Events
Everything posted by PilotMi8
-
было бы полезным поймать баг и прислать трек
-
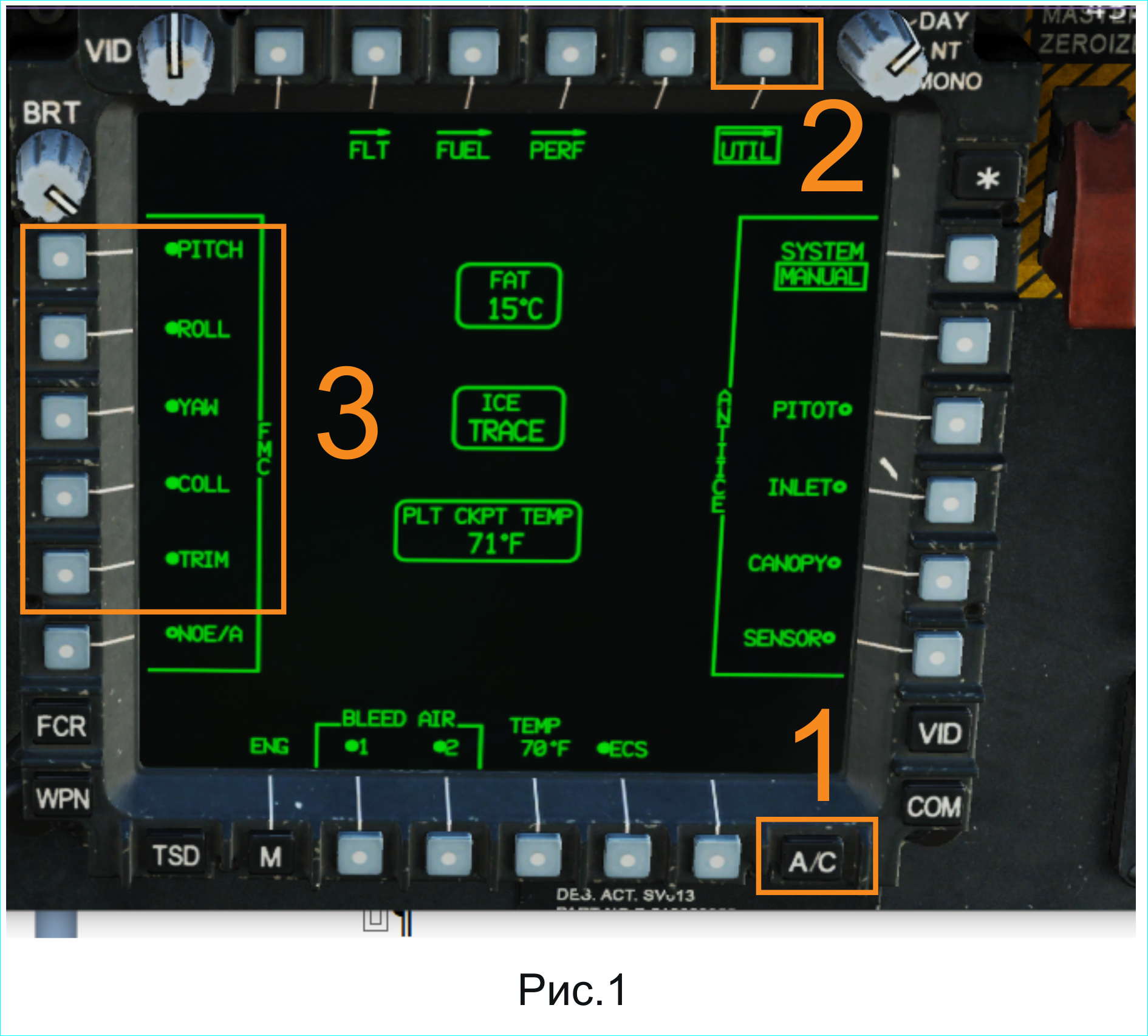
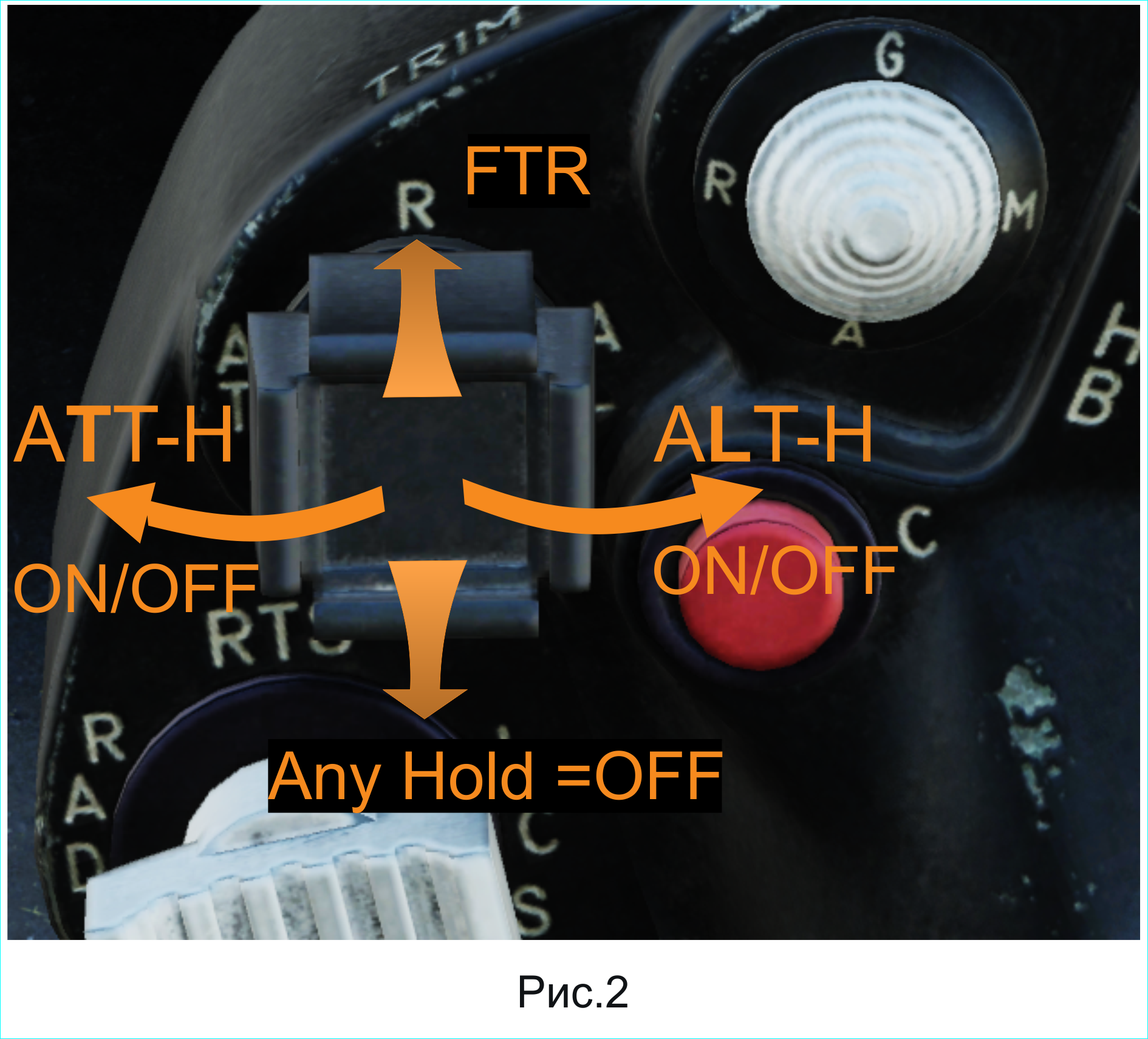
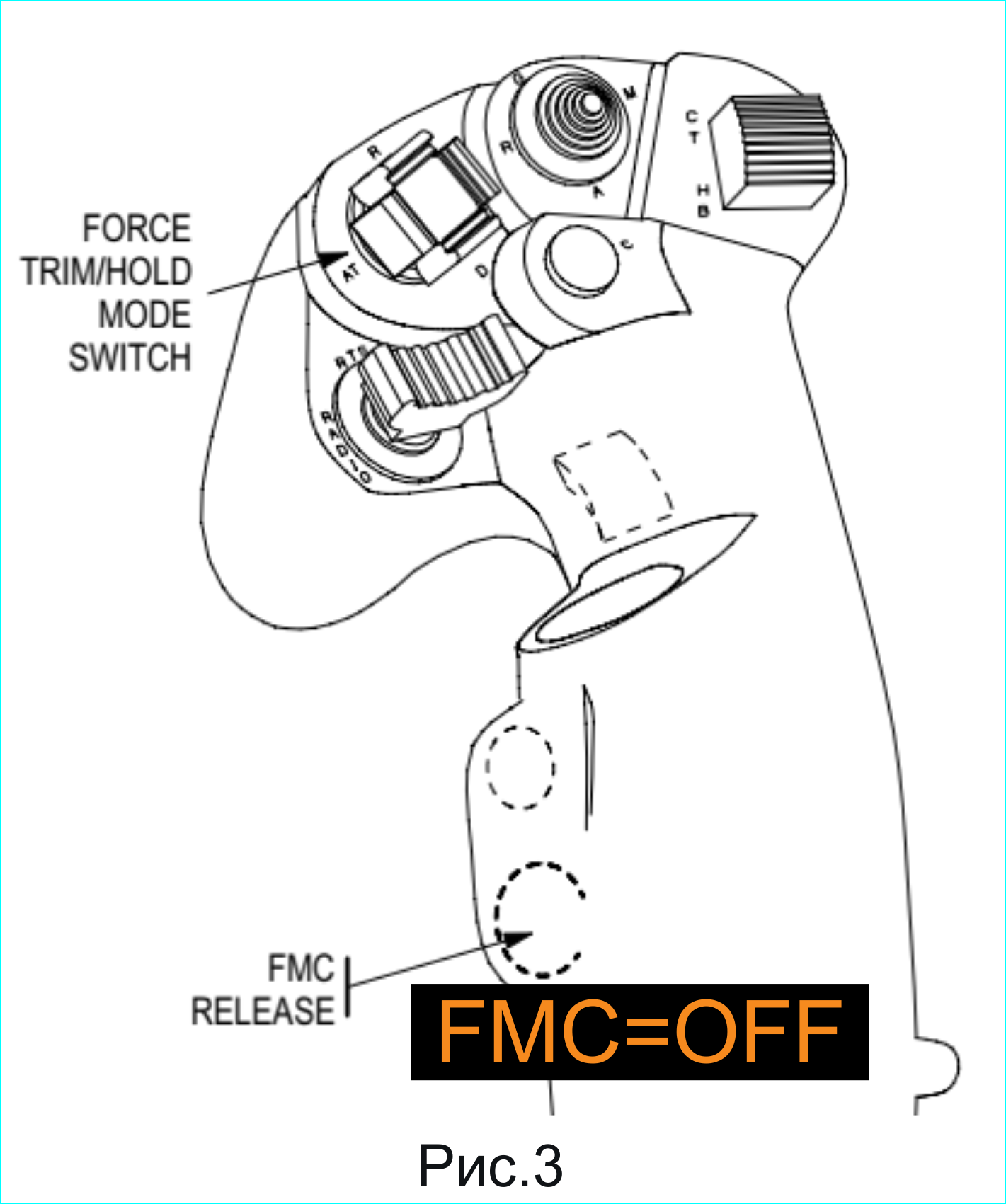
как включить/выключить САУ AH-64D: 1. Режим "только SAS" (SAS-only) - см.Рис.1, 1-2-3, выбрать нужные каналы 2. Режим удержания угловых положений (Attitude hold), или места висения, или вектора скорости - 5-позиционный (подпружиненный) переключатель (Рис.2) - ВЛЕВО (выключить - еще раз ВЛЕВО или вниз). Без включенного SAS не будет работать естественно.. 3. Режим удержания высоты (Altitude hold) - 5-позиционный переключатель ) - ВПРАВО (выключить - еще раз ВПРАВО или вниз). 4. Выключить все режимы Hold "разом" - - 5-позиционный переключатель - ВНИЗ . 5.. "Просто" триммер - 5-позиционный переключатель - ВВЕРХ (и отпустить!). Он же- "инициатор" нового референса положений/состояний вертолета, если был включен режим удержания положений (ATT-Hold). 6. Выключить САУ (Flight Management Computer, FMC) - Рис.3 null

-
сначала нужно понять общую "философию" замысла применения "автопилота" на этом вертолете. Система автоматизированного управления (САУ) вертолета AH-64D (Flight Management Computer, FMC) включает в себя два основных "блока" или подсистемы (разделение условное, для пояснения логики): 1. SAS (Stability Augmentation System) - которая облегчает пилотирование летчику за счет уменьшения потребного числа и амплитуды двойных движений ручкой продольно-поперечного управления (РППУ) и педалями, но не выполняет функцию автоматического поддержания угловых положений (кроме канала направления, см.п.3), или стабилизации скорости полета, или удержания места висения; 2. Подсистема поддержания угловых положений (или скорости полета, или места висения), так называемая система "холдов". Система "холдов" в свою очередь включает в себя две раздельные подсистемы: Attitude Hold (поддержание угловых положений); Altitude Hold (поддержание высоты). Включение всех этих подсистем рассмотрим в следующем посте)) Если первая подсистема занимается тем, что в основном "сглаживает" (демпфирует) угловые ускорения и летчику уже не нужно как трактористу "двигать ручкой по кабине", т.е. не тратить много драгоценного внимания на поддержание положения вертолета и режима полета, то вторая уже может в некотором смысле обеспечить летчику возможность вообще убрать руки и ноги с органов управления)). Это обеспечивается "вступлением" в контур управления вертолетом механизмов сравнения текущего положения с неким "референсным" положением, которое выбрано летчиком в качестве "опорного". Как только текущее положение отличается от референсного, то в соответствующем канале управления (а их четыре: крен, тангаж, направление, высота) начинается "работа" по восстановлению утраченного референсного положения. Как САУ вертолета поймет, какое положение считать референсным? Ответ - это то положение, которое было на момент отпускания усилия с кнопки "триммер" (FTR - Force Trim Release). Таким образом, когда летчик (игрок) нажал и удерживает кнопку FTR САУ "послушно ждет", и ничего не поддерживает за исключением продолжения некоторого демпфирования угловых ускорений. Как только летчик "отпустил" FTR (а это 5-позиционный подпружиненный переключатель, с центральным нейтральным положением, см. следующий пост), тогда САУ "скалывает" текущие углы и скорость (высоту) и начинает их поддерживать. Есть нюанс: в понятие "положение" САУ "вкладывает" различные алгоритмы исходя из текущей скорости полета: если скорость полета до 5 узлов (knots) относительно земли и отпущена кнопка триммера, то САУ "думает", что летчику нужно удерживать место висения (Position Hold). И тогда она через несколько секунд "загонит" вертолет в то место, где была отпущена кнопка триммера (точность - в пределах одного диаметра НВ, место висения считывается в бортовой ИНС)'; если скорость > 5 knots, но до 40 knots, тогда САУ поддерживает текущую скорость полета по прибору (Velocity Hold) и угол скольжения (т.е. вектор скорости); если скорость > 40 (и до макс), тогда удерживаются просто угловые положения (Attitude Hold) в пространстве. Но и тут есть нюансы конечно)): перечисленные режимы работают лишь в некотором диапазоне угловых положений и угловых скоростей. Т.е. нельзя "поставить" вертолет с креном 80гр (к примеру) и "сказать" ему (включив режим ATT-HOLD и отпустив кнопку FTR) - "а теперь держи это положение!" - пошлёт))) Тангаж должен быть в пределах ±30°, крен в пределах ±60°, угловые скорости по крену или тангажу - не более 5° в сек. 3. Режим удержания направления (Heading Hold) работает всегда когда включена SAS, но тоже с ограничениями. При этом до скорости 40 knots - удерживает направление (пока хватает запаса автопилотного управления, ±10%), а после скорости 40 вверх - режим немного меняется (сам собой) и превращается в Turn Coordination, другими словами - поддерживает разворот с постоянным (заданным перед разворотом) углом скольжения, т.е. канал направления "доруливает" так, чтобы угол скольжения сохранялся постоянным, как и до начала разворота. Если до начала разворота шарик был в центре, то и в процессе разворота система "приведет" канал направления в соответствие. Педали конечно неподвижны, всё осуществляется только перемещением силового поршня гидроусилителя канала направления, который в отличие от наших вертолетов смонтирован в концевой балке. Еще конечно ограничений на пару страниц, а также режим полета на малой высоте (установка тангажа, удобного для обзора передней области пространства за счет перенастройки горизонтального стабилизатора) и подробности работы CAS (поддержание угловых скоростей крена и тангажа одного значения на всех скоростях полета при одном и том же отклонении РППУ), но цель была ознакомить с замыслом создателей системы)) Как включить - в следующем посте
-
записали, спасибо) подобная проблема уже была неск.лет тому назад, но видимо снова надо её "перерешить"))
- 24 replies
-
- 3
-

-

-
- не запускаются двигатели
- ми-8
- (and 4 more)
-
такого нет в реальности. Не может летчик (или оператор) нажимая какую-либо кнопку отстреливать один ППИ-26. Мы стараемся поддерживать функциональность моделирования систем вертолета в соответствии с реальными системами. Конечно делаем игровые допущения, но стараемся их делать только в тех местах, где по условиям оборудования рабочего места игрока нельзя сделать как в реальности. Иначе (если создать прецедент) начнут другие просить много чего... поэтому коллеги и утрируют просьбу))
-
я так понимаю претензия к невозможности регулировать подсвет в ночных полетах
-
оо, да у Вас тут вопросов на целую лекцию по моделированию!)) в двух словах и не ответить)) хотя можно! если Вы едете в автомобиле и смотрите на дорогу, то часть объектов и слева и справа водитель видит, часть не видит. Зависит от размера и контраста, но самое главное - куда ось взгляда направлена. Т.е. если вы момент когда водитель повернул голову на мгновение допустим вправо - уточнить цену бензина на вывеске)).. то брошенный камень слева он не заметит))) Наш ИИ-оператор смотрит почти как человек, но более идеально в отношении "дисциплины" обзора)) он не задерживает взгляд на пейзажах или подозрительных лесопосадках)). От оси взгляда есть телесный угол "четкого зрения", бОльшие углы будут уже относится к периферическому зрению с соответствующими зависимостями обнаружения объекта исходя из контраста, углового размера и угла, на котором объект расположен от оси взгляда. Более подробно - это уже нужна лекция)))
-
значит был "занят")) или просто не туда "смотрел"
-
пустой блок нар Б8В20А весит 100кг перевес по крену решается небольшим изменением балансировочного положения РППУ
-
надо показать где именно и в какой степени не так.. из краткого описания трудно понять что именно Вы выполняете, и что по Вашему не так Лучше трек, но можете и видео с экрана монитора. Если видео, то указать высоту площадки, температуру у земли, наличие ветра, полетный вес, скорость полета, должно быть видно индикатор управления, индикатор САУ. Модель повреждений 64го еще WIP
-
постепенно переделается
-
там выше указано - "наблюдение за окружающей обстановкой, если не занят"))
-
в обновлении 16.12.22 уточнена логика системы вооружения Ми-24П. Материалы по этой обновленной логике работы системы вооружения (пока как отдельный документ), см.в первом сообщении темы "Руководство пилота": https://forum.dcs.world/topic/274223-rukovodstvo-pilota/
-
дополнили материалы по логике работы системы вооружения, которая обновлена в текущем патче (см.первое сообщение): https://forum.dcs.world/topic/274223-rukovodstvo-pilota/
-
с грядущим обновлением изменится (была уточнена) логика работы вооружения. Это будет касаться логики функционирования разнотипного оружия в зависимости от того, какие другие типы вооружения присутствуют в подвеске. Мы постарались учесть все возможные и невозможные варианты снаряжения вертолета и ответить на вопросы типа: "а что будет, если подвесить...." Обновления логики касаются стрельбы (работы КМГУ-2) и системы тактического сброса. https://forum.dcs.world/topic/274223-rukovodstvo-pilota/
-
что реализовано - такие типы Ми-8 или виброгасители?? Ми-8 у нас одной модификации, другие пока не предвидятся виброгасители не реализованы пока и не будет реализованы в ближайшие годы ПС да, и совсем забыл - это всё оффтоп! Пишите в форум Ми-8 сообщения про виброгасители Ми-8 - почистим! и Ваши, и мои ПС. сообщения про Ми-8 перенесены в форум Ми-8
-
понятно нет, мы пока что никаких планов про Ми-35М не строили
-
не должна. Это в Ми-8 "должна". Здесь - нет ПС ни один из знакомых летчиков Ми-24 не указывал, что при перемещениях у земли возникает чувство "спасибо ,что живой" от непосильной вибрации
-
чтобы от пыли двигатель отказал, нужно чтобы он в ней проработал несколько десятков часов. Пока что у нас вертолет в каждой миссии новый (точней- не учитывает прошлую наработку). Поэтому Ваша хотелка пока не актуальна мощности прирост почти не заметен, а надо "напречь": 1) 3Д -моделера - от недели до двух (точно не уточнял); 2) программиста (съем/установка), выбор в редакторе, 3) потом программиста динамики - прописать признак, изменить "течение воздуха", 4) потом тестеров - проверить везде... имхо - пока что того не стоит.
-
где написано что мы готовы делать Ми-35М?
-
может быть у Вас какая-то проблема с настройками управления ПН, но возможно причина в другом (см.ниже). ПН у нас сделан в соответствии с документацией. Есть гиростабилизация. Если вертолет висит (имеется ввиду ПН находится на одном и том же месте в вертикальной и горизонтальной плоскостях) , и при этом цель неподвижна - то марка будет стоять на цели "железно". Всё верно! Тоже самое - если вертолет "летит в цель" - тоже марка будет на цели без дополнительных усилий оператора. Однако если цель во время наведения движется относительно СГФ вертолета, или вертолет относительно неподвижной цели смещается (например, на режиме висения перемещается в сторону/по высоте, или в режиме ГП при удержании марки на цели отворачивает от цели), то оператору придется осуществлять удержание линии визирования ПН на цели некоторой "работой" со своей стороны))), а именно - давать угловую скорость для линии визирования, которая при вышеописанных условиях неизбежно будет смещаться относительно цели, не смотря на гиростабилизацию (мы говорим про гиростабилизацию ПН, реализованную в настоящем вертолете Ми-24, а не про гиростабилизацию комплекса танка Т-72, они сильно отличаются по реализации!). Угловая скорость лини визирования ПН относительно СГФ вертолета "задается" Пультом Управления Прибора Наведения (ПУ ПН). Кроме того, она появляется только тогда, когда ПУ НП отклонен на некоторый ненулевой угол от своего походного положения. Чем больше угол, тем больше угловая скорость. И да, с какого-то времени существования модуля DCS: Ми-24П мы добавили в модель 9К113 "признак" минимальной угловой скорости (согласно ТО комплекса). Это значит, что если для удержания марки ПН на цели при движении цели, или движении вертолета относительно цели потребуется угловая скорость ЛВ ПН менее 0.07гр/сек, то оператор этого обеспечить не сможет. Или 0.07гр и более, или ноль. 0.07гр/сек=1.22тыс радиана в секунду. Если цель имеет близкий к указанному значению угловой размер, то оператору придется немного "страдать")).. т.е. осуществлять удержание марки на цели короткими движениями ПУ ПН (туда-сюда). Минимальная скорость ЛВ ПН обусловлена конструкцией гироплатформы, где для начала её прецессии (перемещения от гиростабилизированного положения) требуется создать некоторое минимальное управляющее напряжение, которое не может быть очень близко к нулевому. ПС. про остальные Ваши вопросы нужен целый доклад-отчет)), это на форуме уже там и там поднималось и обсуждалось, может кто-то ответит, что не обсуждалось - обсудим в процессе
-

Рулежная фара, ДИСС на палубе, смена места, канал направления
PilotMi8 replied to Logan54's topic in DCS: Mi-24P Hind
в плане стоит -
Рулежная фара, ДИСС на палубе, смена места, канал направления
PilotMi8 replied to Logan54's topic in DCS: Mi-24P Hind
Вы совершенно правы! -
ух)) в этом точно уже не успеем)) но признаться пока другие задачи в большем приоритете... тем не менее, актуализируем задачу в очередной раз у себя в уме))будем иметь ввиду - если ресурс освободиться на такое время, за которое ему хватит сделать такую кабину, то непременно сделаем!
-
Вы просто мало видели вертолетов Ми-35))) они весьма сильно могут отличаться друг от друга)) у нас в DCS сделана модель вертолета Ми-24П, он же - Ми-35П для партнеров РФ за рубежом. А есть Ми-35М - который с неубираемым шасси, с несущей системой как на Ми-28, с носовой поворотной спаренной пушкой 23-мм, но главное - совершенно с другим БРЭО (другим в сравнении с Ми-35П). ПС а про муки выбора модели (В, П или Д) для разработки в DCS - не поленитесь поискать в этом форуме, там про это уже кучу "копий сломали", все аргументы всех сторон рассмотрели. Нет желания переписывать это снова...