AeriaGloria
-
Posts
5876 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by AeriaGloria
-
I would personally prefer a 9.12S/9.13S add-on. Make a pure 9.13 and call it Aerges level 3 plane add on
-
 My mistake. Was thinking about COC system
My mistake. Was thinking about COC system -
Manuals explaining the 14% detection increase from N-019 M have been around a while and often referenced. ED won’t change it unless they have a better reason. Regardless this is about 9.13S which we will not get full fidelity yet with 9.12A A few simplifications, you can pull 9 G with it with the limiter. Dont know where they get 7 G, MiG-29 can hold 9 G sustained on the deck.
-
I would say to definitely expect ER/ET. EP/EA are the “experimental” ones. Don’t even know difference between EM and EA. If an ARH one exists somewhere, it’s an EA I bet
-
Petrovich cannot see units that are in plain view
AeriaGloria replied to whataboutbob71's topic in Bugs and Problems
Raduga gyros have limit of 30 degrees bank and about 10-15 degree/s nose movement while doors are open. Never seen the gyros topple within those limits. Tracks work really well for me as of a few patches ago, especially if played on the same version they were recorded. Yeah it might be inconvenient to set up a shorter mission, not exactly like MP conditions. But you can always use Google drive or Dropbox to link a larger track file. ED will accept it no differently -
Any helicopter works on a bell curve, and the least power needed is usually around 100-150 kmh. You need most power in hover or at max speed For Mi-24P, the speed for least power needed is usually 140 kmh at lower altitudes. You will see here that collective needed is usually around 6-7 degrees and EPR gauge shows around 5-6. Around hover, you might need 8-10 degrees collective depending on weight and altitude, and if you really pushy either or both you might need the full 14-15 degrees. EPR will show anywhere from nominal to take off power Around cruise at 260 kmh, the collective is at 8-10 degrees collective and EPR will show cruise or nominal power levels. Once you get to 11-12 collective degrees, you are at 300 kmh territory often and EPR showing near max take off power It will perform better with not only less weight and altitude; but should Also perform best around 17-22 degrees Celsius. EVU will decrease power a few percent. Loading wing pylons helps move CG back and make wings lift more by increasing AOA, so this can also increase performance. Loading nose gun also does the opposite. Firing your gun ammo I think moves your CG back about the same amount that shooting two rocket pods moves it forward.
-
If you need anything specific, let me know
-
Expectation on Air to Air missiles of the MiG-29A?
AeriaGloria replied to pepin1234's topic in DCS: MiG-29A Fulcrum
Yes. Everything is shown on HUD just like radar/IRST target, you see range and target mark, steering circle, DLZ of missiles, and instructions on HUD for afterburner/dive/climb/fire/new target/left/right. IRL, it was also used for ground targets, to give good interdiction route and easily find targets. Who knows if this will work in DCS -
No, sorry
-
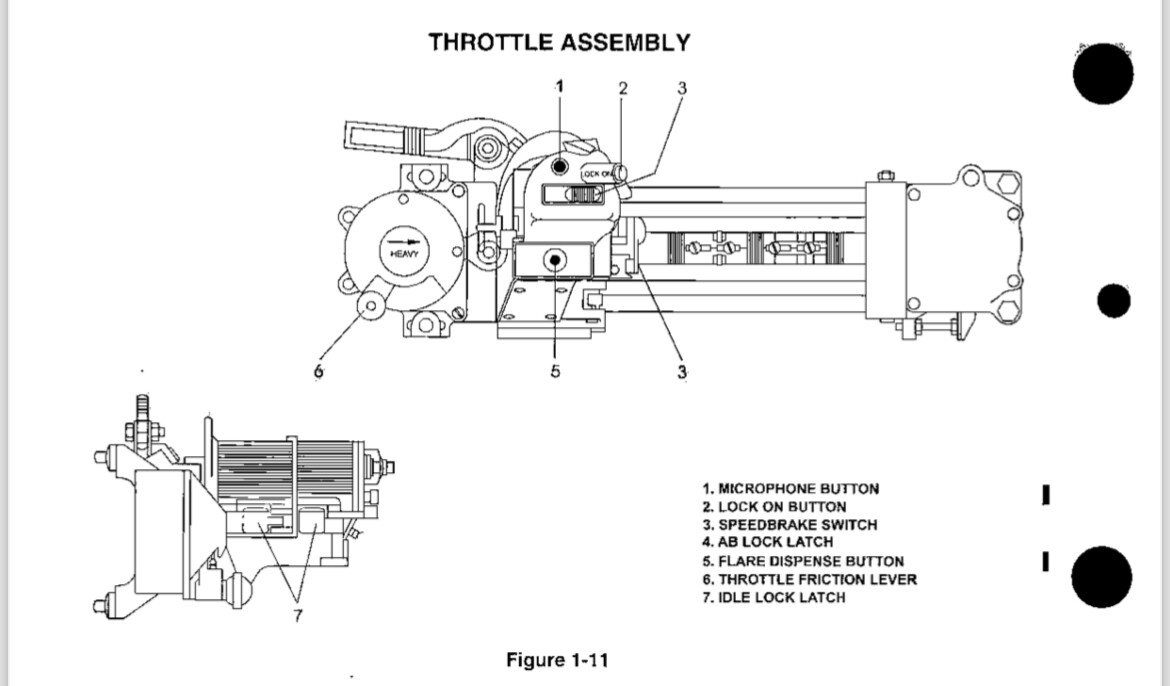
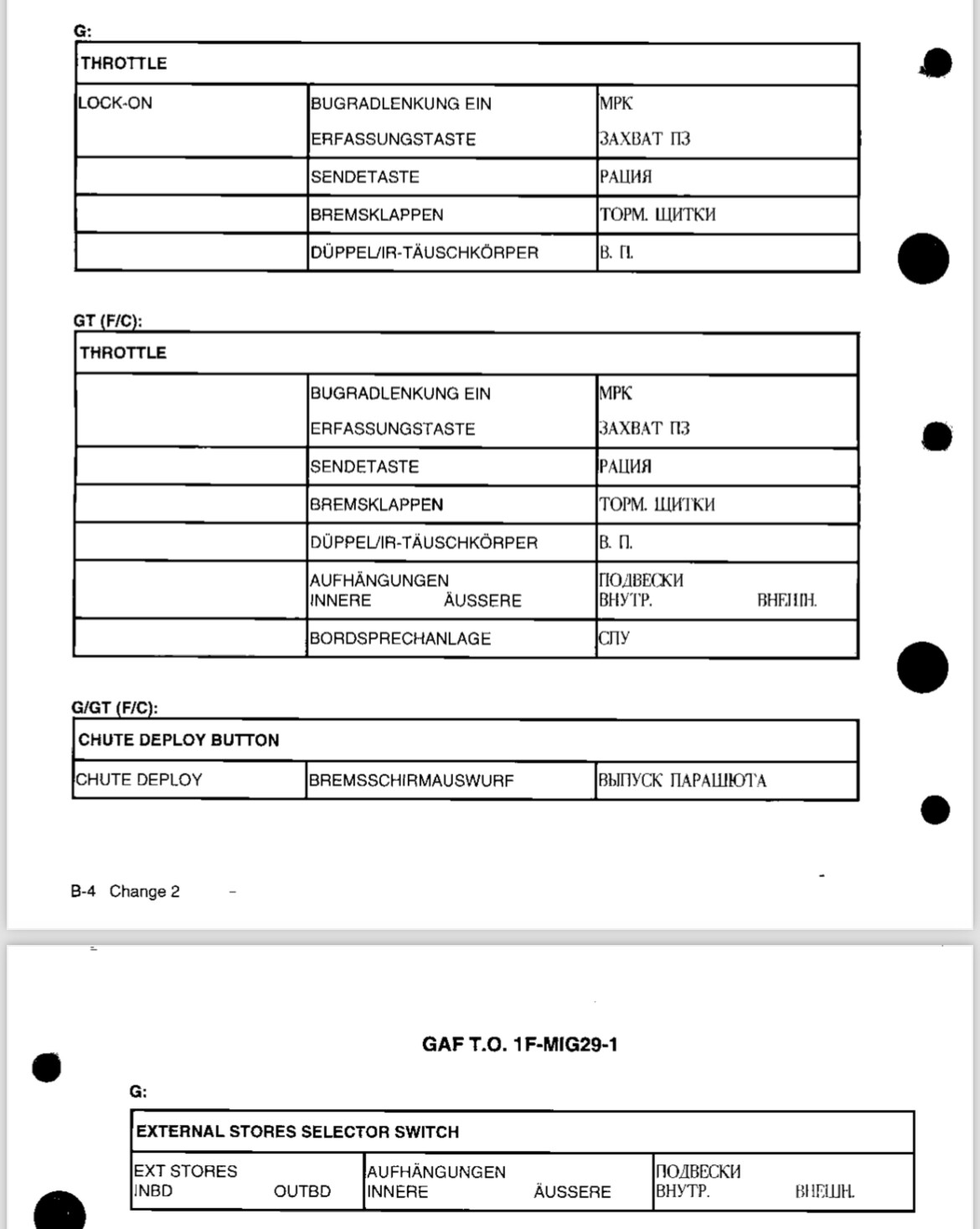
Someone know the word on the throttle?thanks a lot.
AeriaGloria replied to sunwolf's topic in DCS: MiG-29A Fulcrum
From declassified German manual. obviously doesn’t list the the range wheel on top or the inboard/outboard weapon pylon selector button in front
-
You can see the pitch channel giving inputs as speed changes 5-6 kmh when engaged?
-
Interview with former Hind pilot (with engl. subs)
AeriaGloria replied to Deimos's topic in DCS: Mi-24P Hind
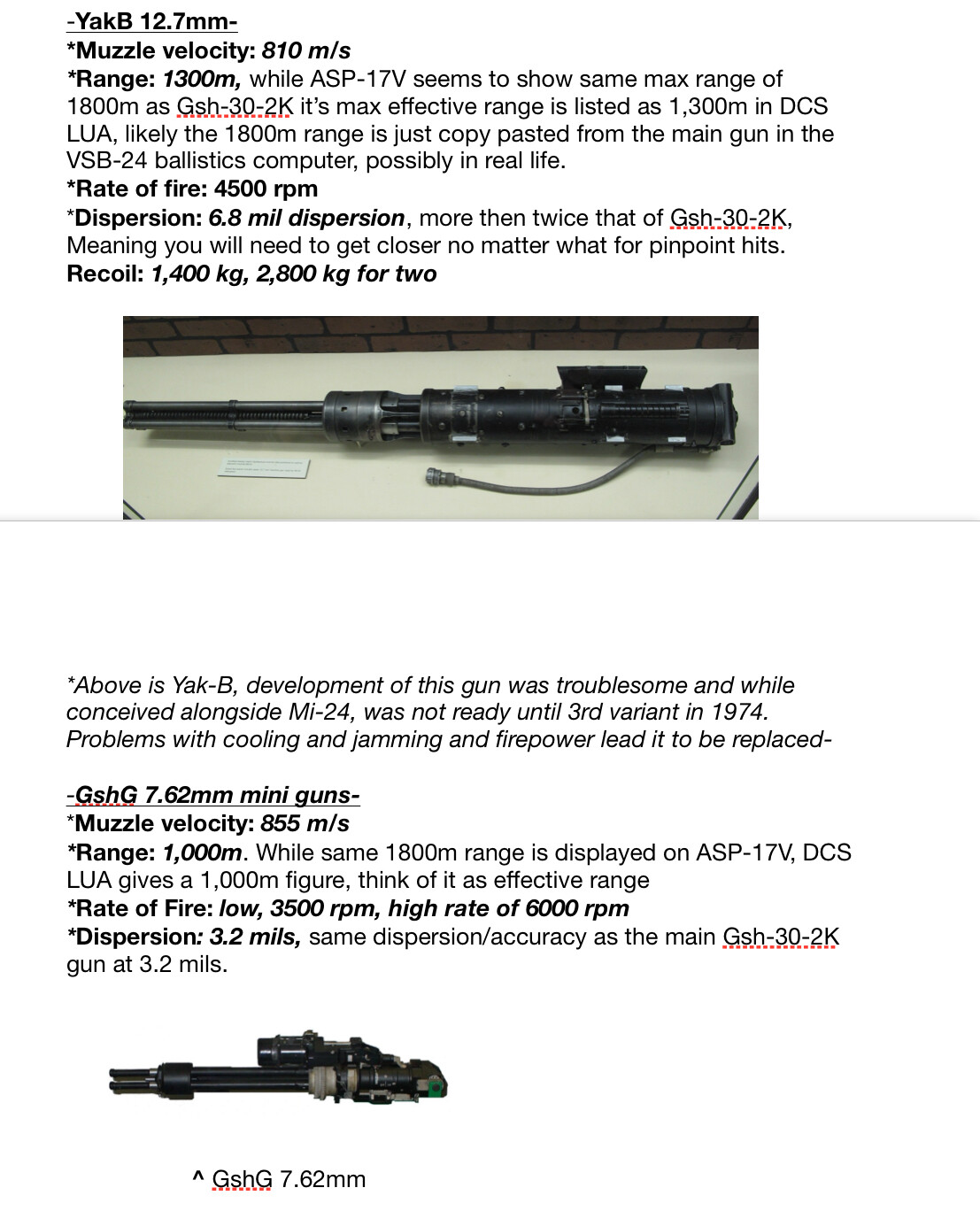
Only the YakB has 1400 kg recoil. The 7.62 GshG has a smaller amount -
While it is emergency procedure for lost generators, it is only for 30-60 minute RTB using battery and APU, since each last only 30 minutes If you look in the Cold War museum manual at what is powered by the generators, and what can be powered by battery/APU gen with everything turned on, you will see that batttery/APU gen cannot cover every thing that the huge generators can. For example gyroscopes, they need the high voltage of the 240 VAC 400 hz generators. Nothing else can do this. So you cannot turn them off if you have generator failure. You just have to fly without them This line from it “The DC system and AC inverters can be operated on the ground with the main engines shut down using the APU starter / generator.” the inverter turns AC to DC, so there is still no proper full powered AC source with just battery and APU gen It also says that in emergency mode, which usually kicks in automatically, only IFF/radar alt/RWR/jammer/vibration/fuel gauge/red lights/PTIT are powered However, AP depends on gyros. Just reading it, it says that 36 VAC 3-phase transformers give the gyro 1 power. And that in emergency mode (PT-125 inverter on) gyro 2 is given power. So maybe try switching the gyro selection from vertical gyro 1 to vertical gyro 2 However, AP still needs 36 VAC at 400 hz to operate. So the 115 VAC transformer is imperative here Official instructions for double generator failure are “-set switches of both generators, rectifiers and transformers to the OFF position; -open the caps and set switches PT-750A and PT-125U of the inverters to the ON position; -Select selector switches TRANSFORMER -115V, TRANSFORMER 36V, PRESS GAUGE XFMR to the STBY position; -Switch oťf all electric power consumers which are not required under given circumstances; in all cases' the controi instruments ťor power plant, fuel gage, vertical gyro No. 1 with roll and pitch indicator shall remain switched on, as well as the heating of LFI pitot tube at an outside air temperature oť 5.' C and lower.” start the AI.9B engine (it is allowed up to an altitude of 4,000 m), set switches APU GEN and POWER FROM BATT to the ON position and check voltage in the helicopter onboard power system as per voltmeter. Discontinue tlre mission and perťorm landing on own airfield, the nearest airfield or a selected landing pad proceeding from the 30-min maximum time of continuous operation of AI-9B APU;……… Power reserve oť the batteries is enough to energize the consumers connected to battery bus for about 9 min of flight (for I min - with search-and-landing light and taxiing light turned on).
-
But doesn’t J-35 maneuver require a roll moment/input to create the necessary conditions?
-
While I don’t completely trust wiki and the same page claims MiG-21 can cobra, I understand the mentions of it being used in the memoirs of Draken pilots. But I wonder what the limitations are, I had heard it needed roll to enter and you can sort of see this in the video.
-
Petrovich cannot see units that are in plain view
AeriaGloria replied to whataboutbob71's topic in Bugs and Problems
Same happened to me on same mission.. I think it might be issue with mission or even the intention that you can’t find anything. I would recommend posting in the section for that campaign because then the creator will be able to respond to you -
investigating Thrust to weight ratio: confused
AeriaGloria replied to bkthunder's topic in MiG-29 for DCS World
In a cursory search all I could find was a comparison of 400/450/500 kmh glide angles. Showing 500 kmh as the best glide speed for range. I might read the section around the graphic later and see if it specifies the 400-450 Kmh as best endurance gliding speed -
need track replay Yet another complaint about Petro . FIX THIS .
AeriaGloria replied to KoN's topic in Bugs and Problems
Even the direction of light is modeled on Petro’s ability to view targets. I can see something like angle of the sun throwing Petro off and perhaps it’s over modeled or something, but hard to tell without track I submitted a track about referencing clutter once, and i think it helped ED at the time understand what sort of delays to build into the system based off of clutter also -
Petrovich cannot see units that are in plain view
AeriaGloria replied to whataboutbob71's topic in Bugs and Problems
Tell petrovich to look at a spot in gunsight area and see if Petro can skew it or if it’s off. Sometimes when it’s only half bad, Petro may be able to target the left or right half of your nose, but not both -
In addition, MiG-29K is FBW and is more unstable then MiG-29 9.12
-
Interesting, I wonder if it would change with ground power
-
Interview with former Hind pilot (with engl. subs)
AeriaGloria replied to Deimos's topic in DCS: Mi-24P Hind
Right now in DCS and since release you can choose to have 2-4 GUV-machine gun pods loaded on Mi-24P. Each pod has 3 Gatling guns, 2x 7.62 Gsh and 1x YakB Gatling gun you would also find in the nose or Mi-24D/V So you can already experience this Gatling gun with Mi-24P in DCS. Even 2-4 of them. Along with twice as many 7.62 Gatling mini guns shooting next to them! Yoy just cannot slew them, but CCIP will work for YakB in Mi-24D/V the operator can slew them, but we will not get those models in DCS anytime soon
-
I don’t really consider what J-35 does a Cobra. What you see is a special stall that happens when you give a little aileron with a lot of elevator. It causes this stall and if not recovered from quickly will cause an unrecoverable deep stall. The video you see is two seaters because this is only done in training so that new pilots can understand how this stall happens and how to recover At no point do I think a J-35 pilot ever said: let me do a Cobra maneuver as a acrobatic move or a combat move to get a missile solution With MiG-29, pressing AP off for 3 seconds will disconnect damper. Thus You can do high AOA, but it is debatable if it is a “cobra” or not. Or even of Pugachev. There is a story that MiG-29 development team had been doing these high AOA excursions, Pugachev saw this. Then applied it to Su-27 which was the first one capable of 90-110 degree AOA. You will never reach that high AOA in DCS or likely real life with a MiG-29. I think with MiG-29, you will not really get higher then 45-60 degrees unless you go so slow you incorporate a tail slide into it
-
Petrovich cannot see units that are in plain view
AeriaGloria replied to whataboutbob71's topic in Bugs and Problems
Sorry no, As mentioned Petro may close the sight early enough during gentle maneuvered but often too late for more violent ones. Sometimes vice versa, it’s unpredictable; and why it’s more of a “backup” than something designed to be 100%. In this case when Petro closes the sight, Petro is only closing the doors and caging the gyroscope which already had a 3.5 minute alignment. If the 30 degree bank angle or around 20 degree/s rotation is exceeded while doors open and gyros are toppled, they need time to settle down with everything off and then turned back on. I believe the main gyroscope spins 60,000 rpm, so takes a while to slow down and completely “reset” after the guidance system is shut off. A small topple, where periscope is only a few degrees off, may only need 30-40 seconds of guidance unit off before you can turn the guidance back on. But if badly toppled, will need a full 3 minutes. So I usually suggest if toppled no matter how much to turn it off for 3.5 minutes then back on for 3.5 minutes, taking 7 minutes total to “repair.” -
Full cold start procedure from the 1982 Czechoslovakian video
AeriaGloria replied to wcdiver's topic in DCS: Mi-24P Hind
They are not described in any manual I can find quickly. It’s possibly just a different equipment fit. There are many different configurations even for same variant when it comes to instrument panel warning lights and gauges. Notice they say 0, so not hooked up