AeriaGloria
-
Posts
5876 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by AeriaGloria
-
 Alpha protection sure. But the faster you are the more you will hit G limit then alpha. Especially with our 1500 kmh IAS limit
Alpha protection sure. But the faster you are the more you will hit G limit then alpha. Especially with our 1500 kmh IAS limit -
Radar Expected Detection Range and Elevation?
AeriaGloria replied to pauldy's topic in Su-27 for DCS World
Which the reference line is +/-60 degrees. So works perfect for seeing if pitch stabilization has room, and antenna elevation compared to both horizon and nose -
Mi-24P autopilot and weapons guides, + Aerodynamics
AeriaGloria replied to AeriaGloria's topic in DCS: Mi-24P Hind
I can update it. Basically, all S-5 are now updated to compensate for being more explosive then weight in TNT. This means S-5KO is more powerful then it used to be. You will find that S-5M is basically same explosive power as S-5KO, with none of the anti armor penetration. S-5KP will have the most explosive power by I think 10-20%, and the most penetration. The con is that it’s also the heaviest, and I think was only made in the late 80s as a modern fuse upgrade for S-5 before it went out of production for USSR. The in game model is dated 1986
-
Ahh, too bad we don’t have the S-5 flare rocket
-
reported MI-24 cold start, rotor spinup time.
AeriaGloria replied to wcdiver's topic in DCS: Mi-24P Hind
I haven’t seen setting Gregen latitude in any start up or pre check sequence. I believe 1/10 of latitude is about 11 km, so I would expect it to be set upon arrival to airbase/FARP. There is many things to do when transferring a bird to a new airfield that maintenance can or doesn’t have to do, such as correcting for local magnetic deviation with the Greben and other things connected to it. -
Whether a particular module models flares effect on seeker or not, as soon as missile leaves the rail, they will all behave the same and go for a flare that was released before launch if it the countermeasures meet the proper criteria and RNG
-
reported MI-24 cold start, rotor spinup time.
AeriaGloria replied to wcdiver's topic in DCS: Mi-24P Hind
And manual -
I also use the parking break bind sometimes for some extra wheel brake torque
-
This must be new?
-
Radar Expected Detection Range and Elevation?
AeriaGloria replied to pauldy's topic in Su-27 for DCS World
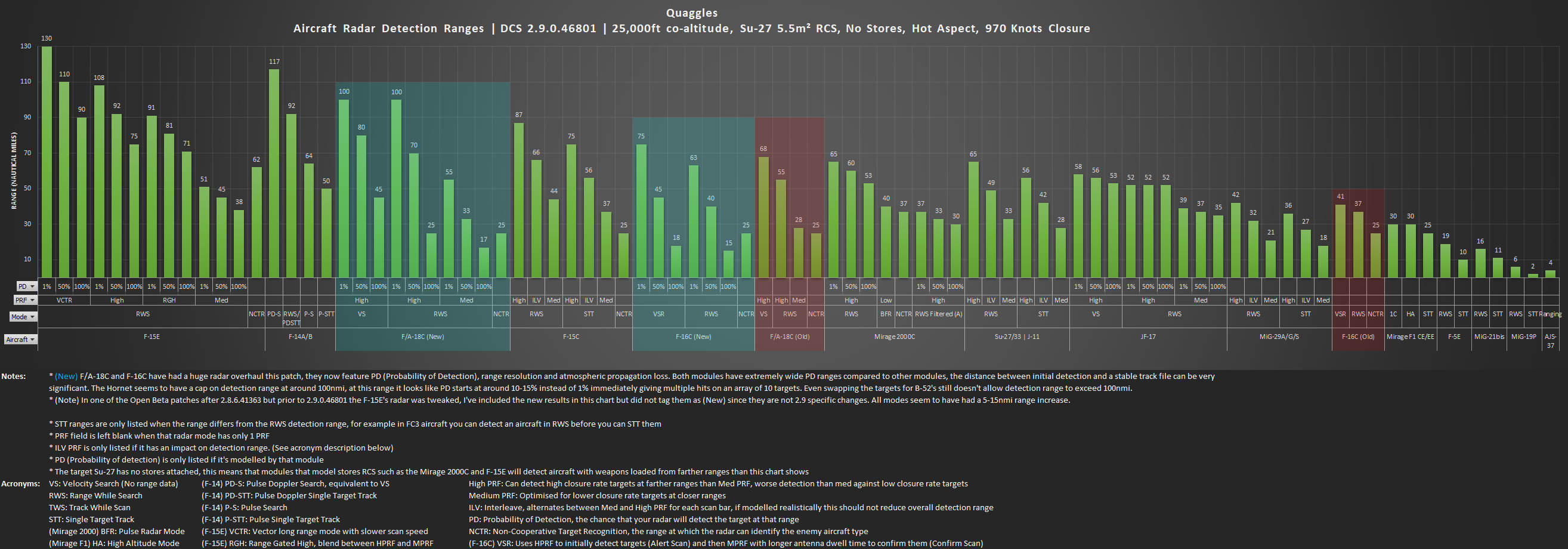
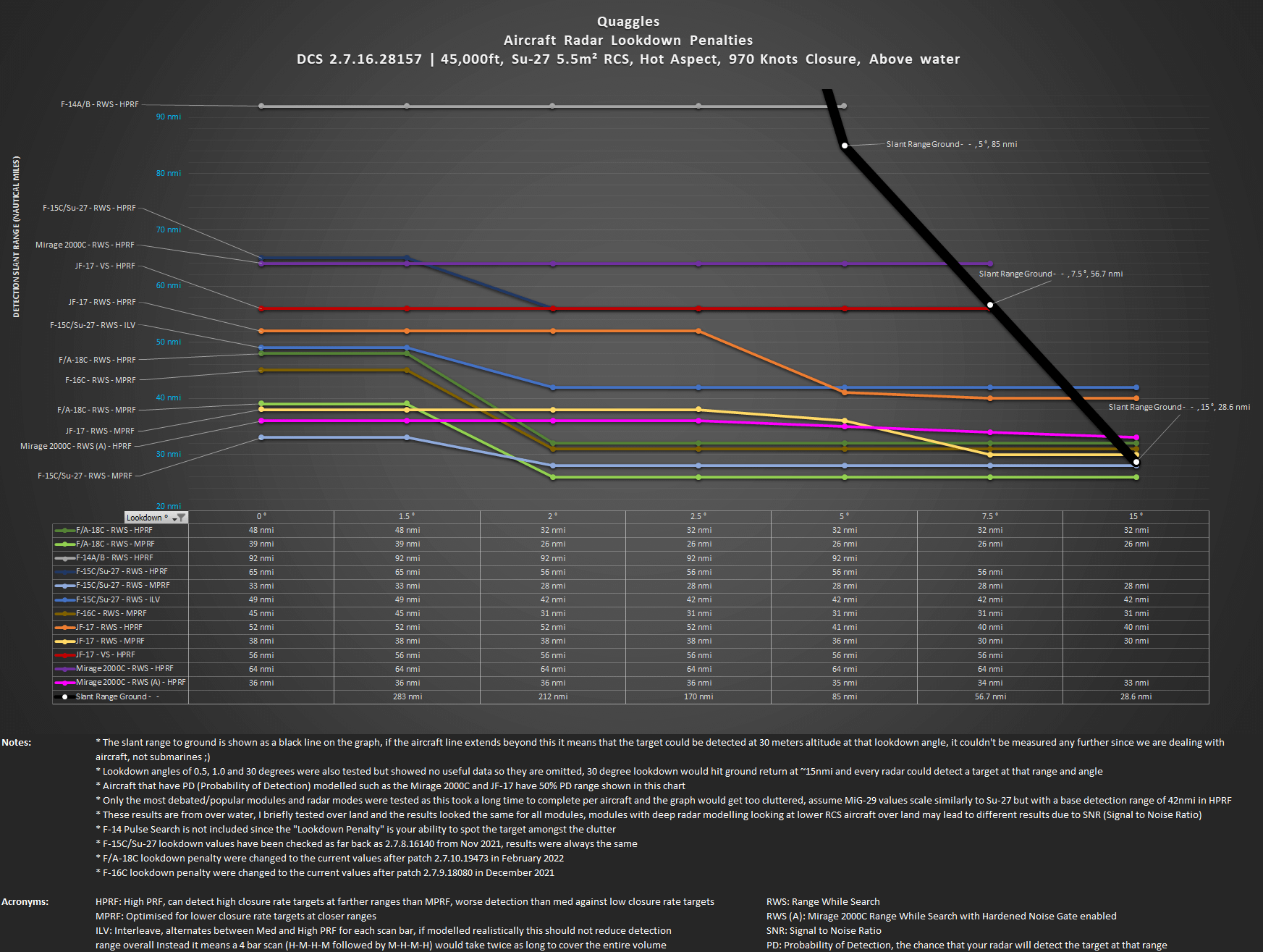
While the look down table I posted is from 2.7 (because that’s the latest Quayle’s has made), you’ll see that my radar range chart above it is from 2.9.046, as it has F-15E included. Mirage numbers are basically identical in both charts, but many other modules are updated I believe they are talking about the results of Quaggles testing that’s been posted above. Which shows rather equal ranges for same target and parameters. One thing to be aware of on our Mirage, is I think it’s highest range mode shown on the chart is very unfiltered, and if you filter it to the extent of N-001 default, results would be different. -
The reason is that the missile has barely any ability to maneuver significantly, it is much more like a “guided rocket” in that sense. Since the missile can’t maneuver much, as well as needing the flare from the missile to be seen by the periscope as soon as possible (if the periscope can’t see the missile flare, it can’t guide missile). It needs to see this flare within 0.5 seconds. So the missile has to be fired directly into the LOS. Your outer wing tip pylons are actually tilted various degrees inward, and about 2 degrees up so that the missile is right in front of the nose when guidance starts.
-
As Miki said, if target is significantly obstructed Petro will refuse top fire and give you text in the upper right hand corner explaining why and possibly best angle to reattack. ”Launch Authority” has two modes. If Petro GUI is green and you’re in free fire, it will only fire when crosshair is in the small circle and in range. By default the UI is beige and will fire whenever you have missiles ready, reticule inside small circle (tone), and targets aren’t obstructed. In that beige mode where you have to press fire button, range doesn’t matter. Petro will let you fire 10 km away. There is no minimum range either. A track or video might be easier as this is all that Petro cares about, that reticule is in small circle/tone, and target unobstructed.
-
Your outside 4 ATGM pylons will work with ANYTHING. Weapon restrictions only apply to 4 main pylons. In that case, GUV pods only work with other GUV pods. Aside from GUV pods being near useless in reality and used in Afghanistan only under literal threat of punishment, this is another reason it’s either one of the rarest IRL load outs, or it’s the load out you see when the operator doesn’t want to add flight hours to more valuable munitions
-
Radar Expected Detection Range and Elevation?
AeriaGloria replied to pauldy's topic in Su-27 for DCS World
Cool, I usually keep it at 10 km and go up and down 1. Gives a nice about 4 degree overlap to not miss too much. As for range, at high altitudes and forward aspect you’ll get 60-80 km range. Closer to 35-40 km if front aspect and on the deck At rear aspect: you’ll get 30-50 km when high up and 20-30 km down low. It will depend on look up angle, RCS, PRF, and remember thar you will always detect something 25% further then you can track it. Same is true for IRST, it’s part of how the computer builds a target in memory. It needs something 25% probability of detection to display a target and track, but like 50% to actually lock.
-
Radar Expected Detection Range and Elevation?
AeriaGloria replied to pauldy's topic in Su-27 for DCS World
Okay I see what you mean, vampire teeth and elevation cue lines up means radar is basically boresighted. By “straight ahead” I thought you meant 0 degrees elevation As for the delta H values, no they are not realistic in game. You can set -3/3, -5/5, -7/7, -9/9 delta H values that are just not available in reality. So using ours or my technique you would come to basically 6-10 degree gaps where without 3/5/7/9 settings, you can’t ensure full coverage throughout the elevation range Works fine in FC3 now. But not how it would work in reality or a full fidelity module that doesn’t give you any number between 1 and 10 as a delta H possibility. The MiG-29 9.12/13 is the same way. If you set expected distance to 12 km, every single delta H would move it a little less then 5 degrees. and when you got above 2 and have to skip odd number delta H, every jump of 2 delta H will only move scan zone about 10 degrees. That way you have no “gaps” At that expected range, you can still scan 45 degrees up and 30 degrees down at delta H limits. In order to hit max mechanical limit, you would need expected range below 11 km got up and expected range below 7 km for down. EDIT: looking at it again I don’t see -1/1 delta H for Su-27. Maybe it’s there or not, I’ll have to read the manual. If this is true, you would really want 12 km distance for full coverage within +45/-30 degrees elevation
-
Radar Expected Detection Range and Elevation?
AeriaGloria replied to pauldy's topic in Su-27 for DCS World
I appreciate that you specify the elevation scan area. I assume this is sourced from the Su-27SK manual? As for the vampire teeth as you say, it is my understanding that only shows pitch elevation. If flying nose level, and radar vertical line is right next to it; then yes radar is looking right in front of nose. If you pitch up 45 degrees, the “vampire teeth” will be near the top of the vertical HUD line that covers +/-60 degree pitch. But the small vertical line showing radar scan will still be level and stabilized pointing forward. Or rather, vampire teeth are showing nose pitch and the vertical line the sensor scan elevation, on a +/-60 degree scale. Is that basically what you mean? If you wanted to set target range for each delta H increment to equal 10 degrees, set it to 6 km. With a full fidelity it would be harder as the delta H increments are coarser the farther from 0 you are. So I think in full fidelity, like coming MiG-29, we might have to play with larger expected ranges and smaller scan zone increments in order to get consistent coverage with only -6/-4/-2-1/0/1/2/4/6/8/10 delta H options For OP, you can keep the target range at 10 km and just manually move the scan range up. It takes 3.6 seconds for one scan, so maybe move scan up or down every 5 seconds or so. If you set expected range to 6 km, there will be almost no overlap between elevation steps, and you will get the most coverage with the least amount of button presses -
Okay, so I need to see a 178mm wide object traveling at Mach 1-4, through my scratched up canopy, and then be able to spot how far from 90 degree angle off it is with only external references. Then fly 1-4 degrees from that 90 degree zone depending on my speed, and maintain that until it passes so it doesn’t retain lock
-
Yes of course, just wanted to see what your formula said for an average speed you want to maintain in a BVR fight.
-
For 36 kmh notch, at 1100 kmh (high subsonic), using this formula I find that you need around +/-1.75 degree of 90 degrees to stay within +/- 36 kmh notch . Obviously you also need the missile to not have enough up look to not need a notch.
-
How do you know the threat is exactly 90 degrees if not by RWR? Seeing missile with MK 1 eye ball?
-
Is your “control helper” in settings on?
-
You just saved me doing exactly what you did. Bravo!
-
I use FFB, so when it comes to central position trimmer and control diamond, I don’t have those You seem to use AP correctly, like Black Shark you set the attitude hold with them button. What can happen is if you trim level and nose down, pitch AP is now giving pitch up. You fight it with forward cyclic, trim, and now since AP attitude hold is reset to current pitch you no longer need forward cyclic to fight the AP. But it seems like your problem might be wider ranging then that Hat trim will move stick but not effect the attitude holds I’m sure you already checked for any double binds?
-
This is actually the work of the power synchronizer, the droop compensator working one one engine and synchronizer on the other, so during changes of engine rpm you will almost always see a small difference in RPM, and they will over time gradually equalize out. My point is, for speed hold, whatever effect it “should” have or not, I cannot see it working on the pitch channel as the autopilot panel shows. Checks for speed hold in the aircraft include checking for differences with the pitch channel IN-1 gauge. You do not see it here, and I even if I never move the cyclic during speed changes the pitch IN-1 only ever shows pitch AP, and no difference with speed hold engaged. If you fly Mi-24, however difference it’s characteristics, and you will both see the speed hold effecting the pitch channel IN-1, but feel it quite extensively as well. I’ll run a better test with instant pause, and maybe you will see if speed hold is indeed working, it is not appearing to do so through pitch channel as it should
-
Probably nothing. In FC3 you see some duplicate binds from over the years them trying to make all FC3 aircraft share most binds while maintaining individuality