AeriaGloria
-
Posts
5876 -
Joined
-
Last visited
-
Days Won
2
Content Type
Profiles
Forums
Events
Everything posted by AeriaGloria
-

solved Can't seem to communicate with ground crew
AeriaGloria replied to AhSoul's topic in DCS: Mi-24P Hind
Sometimes that will happen if the engine/rotor is spinning, and your voice is “being drowned out.” -
solved Can't seem to communicate with ground crew
AeriaGloria replied to AhSoul's topic in DCS: Mi-24P Hind
AFAIK, the cyclic is for in-aircraft comm, flipping the switch on SPU-8 up will engage the external PA to talk to ground crew while cabin is closed -
Glad to help. The engine will take 8-9 seconds to accelerate after being in low collective/high rotor rpm. 140 kmh is the speed where the lowest collective will keep you flying. So any speed below that will require an increase in collective. If slowing down for typical landing, I usually start adding power back in around 100 kmh. If you don’t see the shaking for ETL, as long as nose is within +/-7 degrees pitch your hover gauge will come online as soon as you pass 50 kmh ground speed. If you aren’t increasing power for over once you’re below that, it’s probably already too late. Im sure you’ll get use to the pattern of slow down and pitch up to slow speed, colllective low and using longitudinal cyclic to keep low descent rate. Seeing the high rotor rpm and low engine rpm, then as you add collective you can see that your engines will barely increase power until your rpm slows down to 95% or less. Then once rotor rpm is below 95% the engines will start jumping, and once they hit 90% you don’t need to worry much. Taking off and landing into the wind is a huge help, sometimes the wind is enough to weathervane you or even VRS the tail if fast enough. On the autopilots, some like them some don’t. I love it after I learned that you set the attitude hold with trim button. But different strokes for different folks. When you hover btw, your nose will be about 2-5 degrees up, usually 3.5 degrees in no wind and neutral CG. If in doubt, put your nose there. Luckily with its tilted transmission, you don’t ever need to worry about balancing tail rotor thrust like other helicopters. Doing running landings/takeoff slower and slower is also awesome practice
-
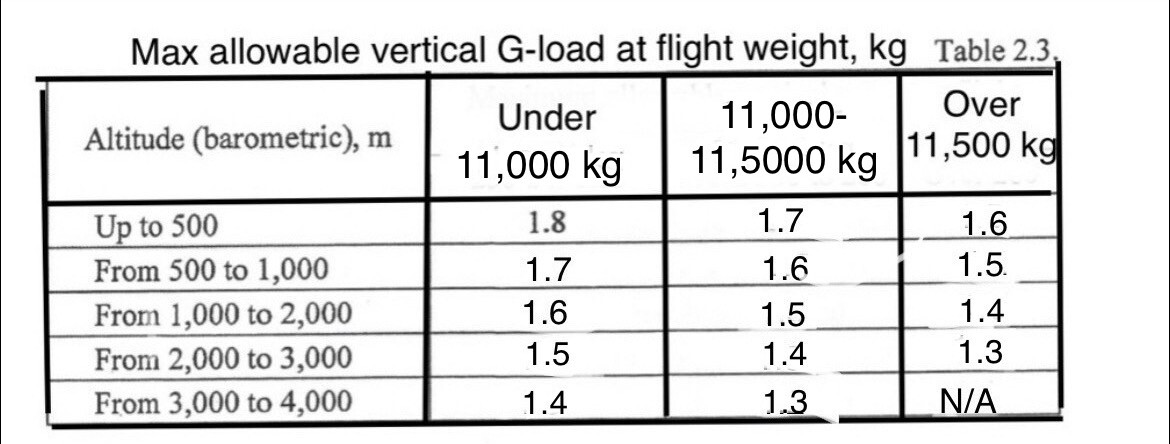
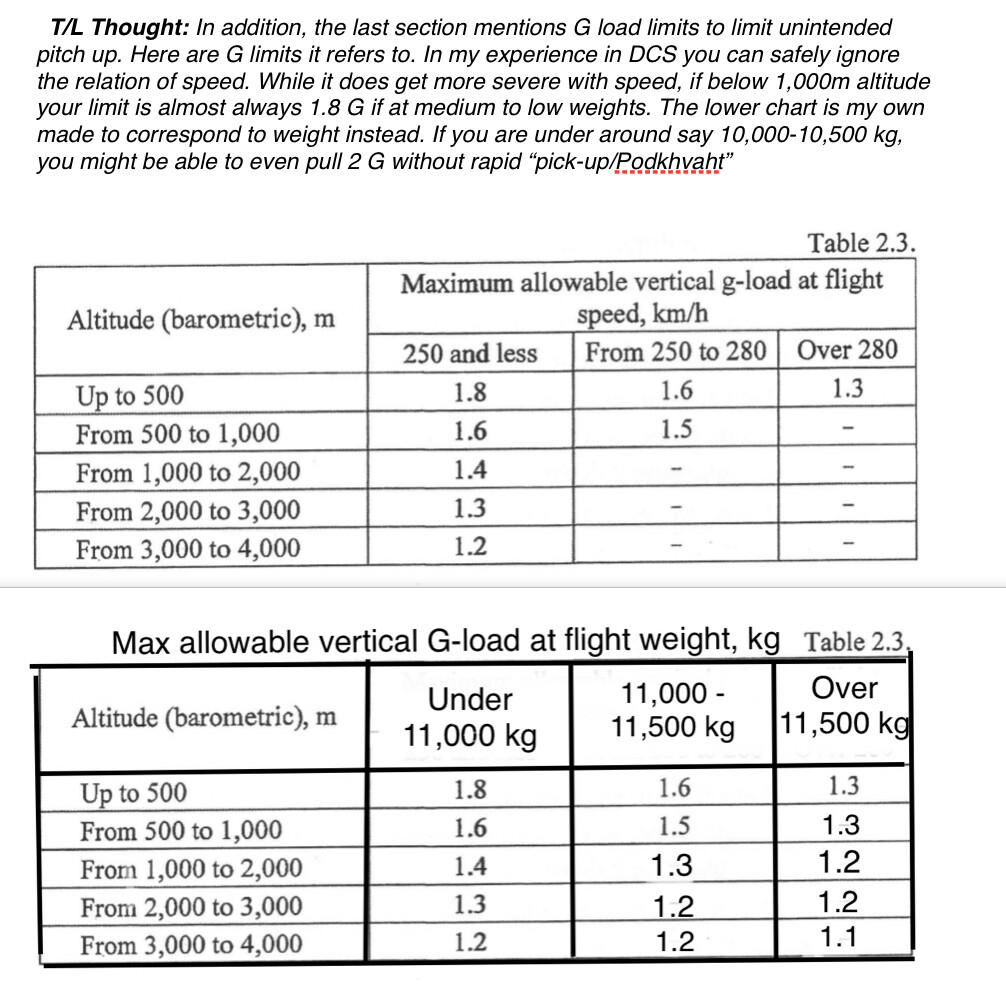
You mean exceeding the G limit and going full into Podkhvaht/pick up /mushing? I would assume some things sensitive are not built for more then 2.7 G. IRL it was said that this behavior sometimes led to tail chopping from the rotor. But the pilot could prevent this as long as they didn’t lower collective too much and pull back I see. You manually never turn on AP? If you use auto start it’s on by default. With that fuel and weapons load you are usually under max takeoff weight under 1,000m at all times. Move collective slowly, 1-2 degrees per second. Remember your rotor cannot only have VRS, but your tail rotor can VRS if you fly right more then 18 kmh (you can see this on the hover gauge). At that weight and below 1,000m alt, it takes around 8-10 degrees of collective to hover. You can also turn off the pedal dampening which uses a hydraulic unit to slow down pedals to a max speed of 3 seconds to reach full deflection from center. So anytime you move axis more then 33% a second it will slow down your input, and you can see this happening with yellow caution light below gyro vertical lights when pedals are moved too fast. You can turn this off with a red guarded switch on lower left instrument panel, beteeen collective gauge and rotor rpm gauge, I only ever hit max collective in a hover when out of ground effect or severely over weight. Remember that you don’t gain any thrust between 88-92% rpm. Your governor holds your rotor rpm at 95%, and your tail rotor is tied to this. If your rotor rpm decreases, so does your tail rotor authority, I think the more you practice being smooth and getting in and out of ETL and ground effect easily, you will figure out I worked on the G load chart I made to make it less conservative and more accurate

-
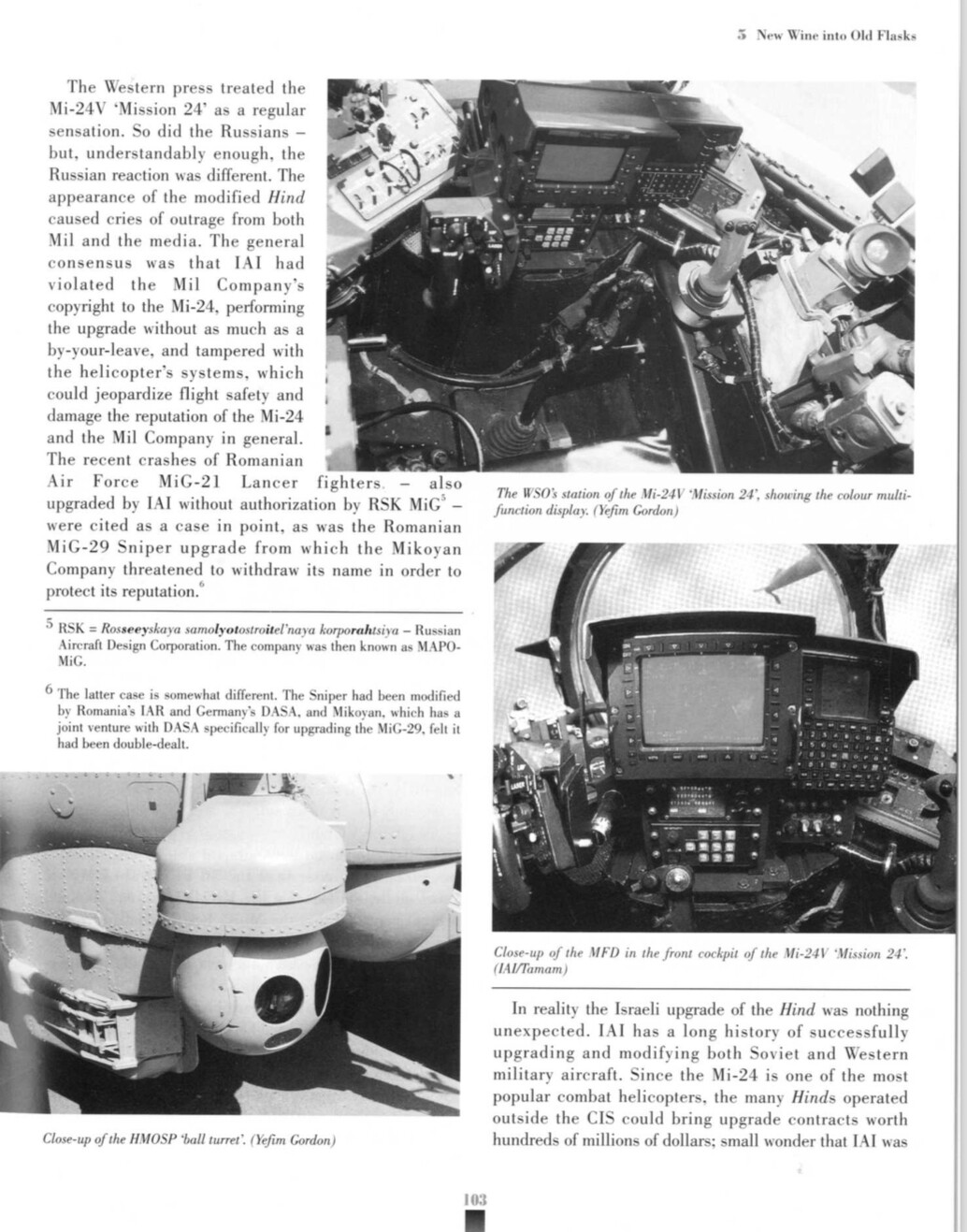
And the external/cockpi model
-
As if note, I would like to bring extra attention to how barrel heat is having massive effects on accuracy after just 3-4 shots. Should really be looked into
-
Petro not seeing targets at all, *sometimes*
AeriaGloria replied to KiubekPL's topic in Bugs and Problems
I hear battle damage very well, but it might take settings adjustment, I have hear in helmet off to hear bullet impacts better. Be observant when Petro locks but won’t fire, there is a voice line that isn’t voiced yet “Target is obstructed re attack right/left/higher/lower.” If you see that text box when trying to fire. It’s because the target is too obstructed to hit As for damage, I often check my four pylon lights on the weapon panel to make sure the inner four still work -
Petro not seeing targets at all, *sometimes*
AeriaGloria replied to KiubekPL's topic in Bugs and Problems
It’s possible what you were looking at in the video is the destroyed model of the armed barracks building -
missing info We are out of missiles---after shooting 4 out 8 ATGMs..
AeriaGloria replied to lei's topic in DCS: Mi-24P Hind
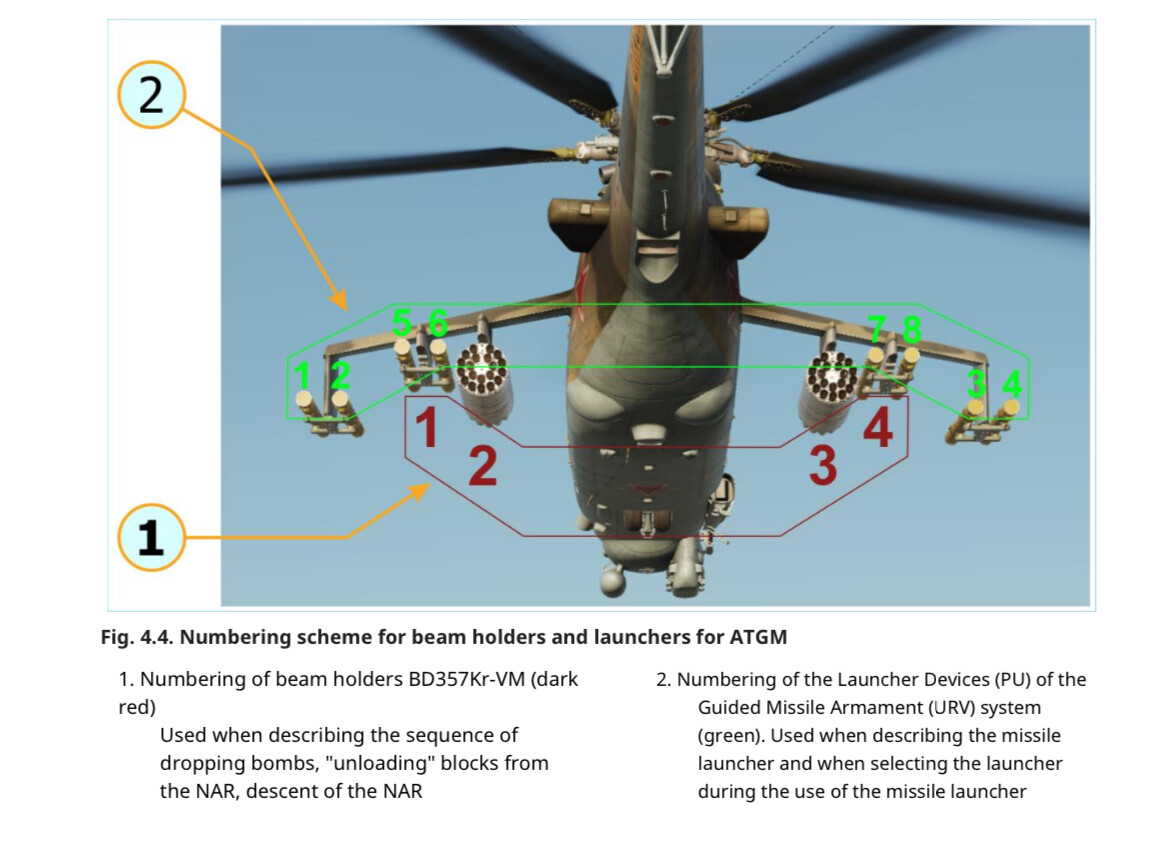
ATGMs are fired by Petro in number order, 1-8. No need to switch pylons, you can tell Petro to switch missile type with Petro menu
-
missing info We are out of missiles---after shooting 4 out 8 ATGMs..
AeriaGloria replied to lei's topic in DCS: Mi-24P Hind
Not on auto start, but they aren’t needed. All you need to do is press the rocket fire button an extra time to finish the salvo. It’s something they could’ve not simulated and no one would care. As for the four loaded lights, yes if they go out and you don’t jettison/fire the station , then it’s because the pylon is damaged. Sometiems Petro won’t fire ATGm If target is obstructed, and you wil get a text message saying so -
missing info We are out of missiles---after shooting 4 out 8 ATGMs..
AeriaGloria replied to lei's topic in DCS: Mi-24P Hind
If you press “rocket” arm it will turn on two rocket armed orange lights on weapon panel. All this does is reset rocket pods to start at first rocket. I think in DCS, if you don’t Press it, it will start halfway through the first salvo -
Whether these gun changes are more realistic or not, which your evidence definitely suggests is the case, I do think it will be more “fun” having a more accurate 37mm and less accurate 23mm. It makes sense the Soviets would intent the crews to have higher standards on the low ROF 37mm that was truly meant for long range bomber pounding, vs the faster firing 23mm Also I was finding bullet alignment charts and instructions for MiG-19 also: they are identical. So it’s sight likely has same 25’ (0.4 degree)) down turned sight
-
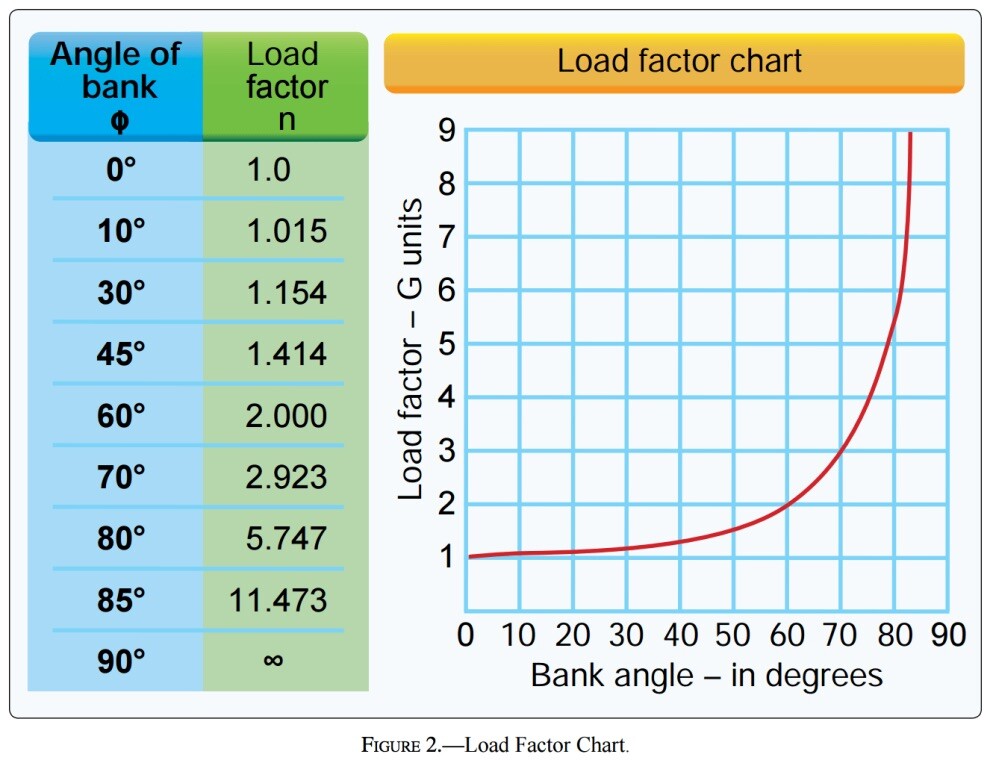
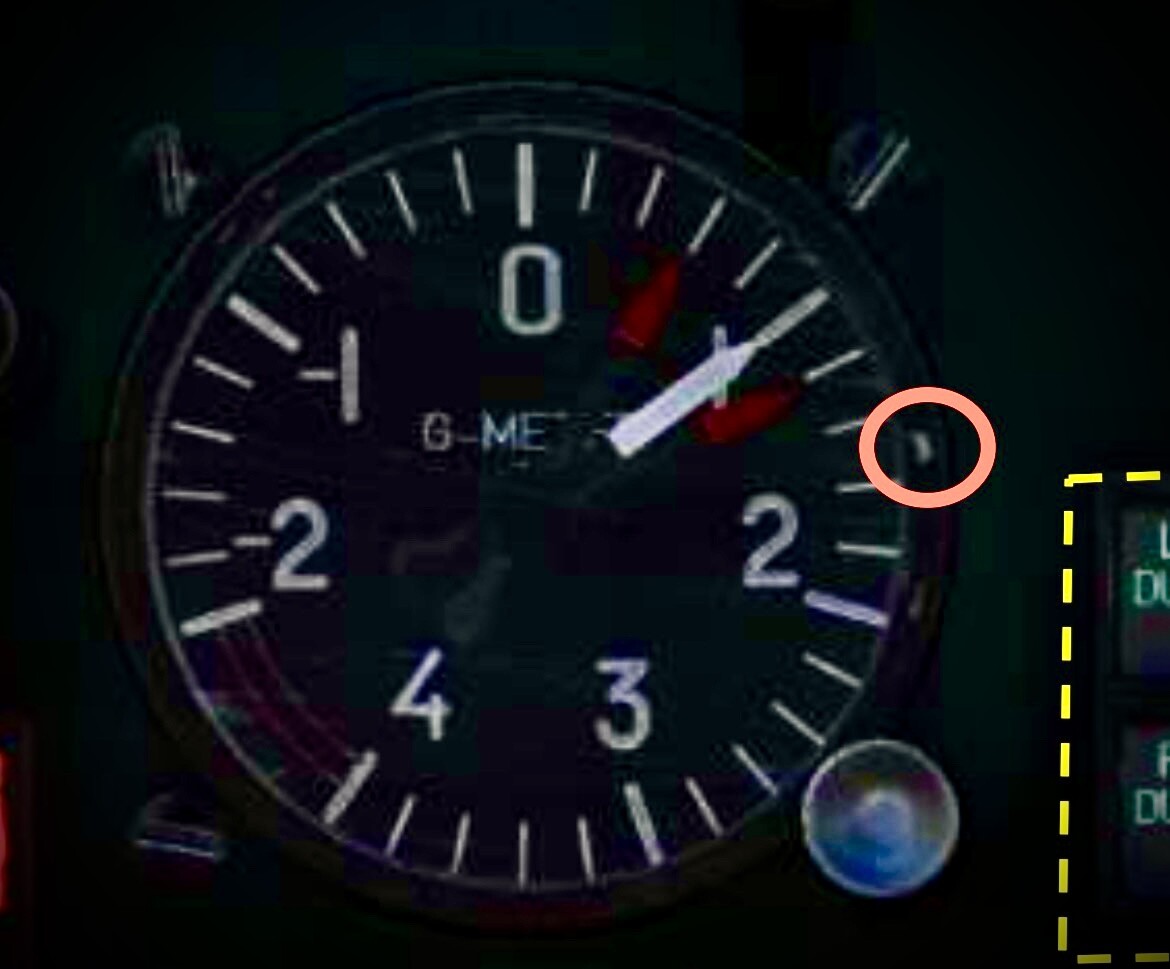
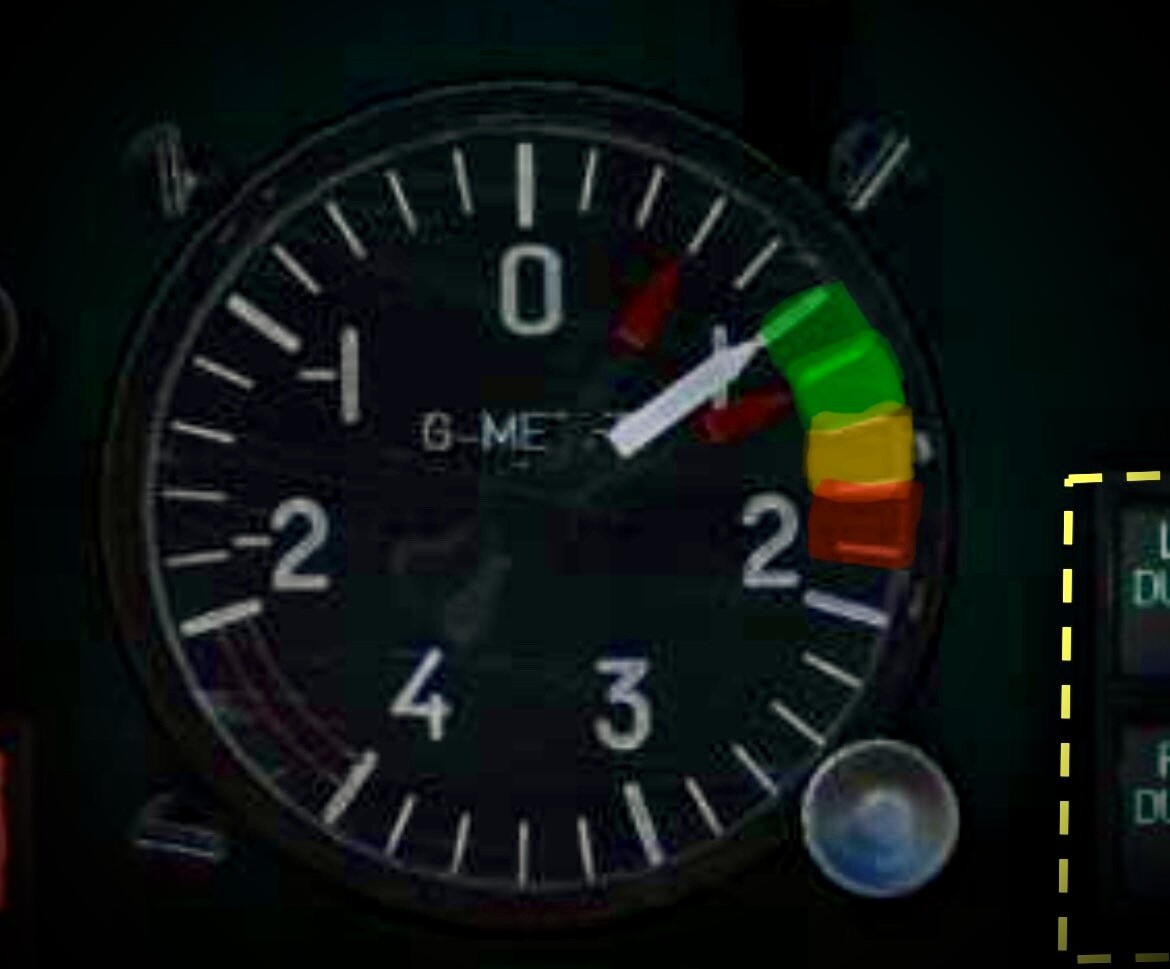
1. This is a behavior known by the Russians as “Podkhvaht” or “pick up.” It is a blend of two things A. Mushing: this is what happens when a helicopter at high speed experiences high enough G load that AOA becomes positive, and up flow of air through the rotor causes it to stall, causing RBS like symptoms as you lose control and thrust B. The wing is installed at 19 degree angle. Not coincidentally, the wing also stalls at 19-20 degrees. This means almost any positive AOA will stall the wing. The wing is also quite a distance behind the rotor mast and center of gravity (CG), this means that the lift it creates (up to 25% in cruise) also causes a pitch down moment. It also means that any payload on the wing moves CG back, which increases AOA and thus wing lift. This is one reason that loading weight on the pylons has so little effect on it in cruise. So when increase G load between 1.4-1.8 G, at some point the Angle of Attack will transition from above your nose to below, your rotor will get up flow and begins to stall and your wing is also stalling. The first part of the rotor to stall is the right side, causing a pitch up. The wing being behind the CG/rotor, is causing a lot of pitch down force with its almost 3,000 kg of lift. Now that it’s stalling, suddenly the force pitching the nose down goes away and makes the pitch up worse. So it’s a cascading intermeshing of issues, that all happen to be caused at around the same time. There are three ways to recover or prevent this happening! A. this always happens at a certain G-load, I will post the G chart, a good rule of thumb at medium weights and altitudes is don’t exceed 1.6-1.8 G. If in a level turn, this is around 50-55 degree bank B. Decrease collective pitch 1-3 degrees. This will un stall the rotor. You might be surprised how fast it can snap back after just 1-3 degrees less collective. C. Full stick forward! Also. If your are nearing the ground, decrease roll angle during recovery. The less your bank angle, the less altitude you lose while this happens Also. Manual recommends to increase G to desired load in a turn over the course of 2-3 seconds. This makes a big difference for me There is a real G chart for this, but has a huge margin of safety for speed. I usually ignore the speed restrictions, it will always happen at the same G, but the faster you are the more violent it will be. You can get a really good feel for this by doing 50-55 degree angle bank turns. In my experience, weight, altitude, and collective decide what your max G will be There is dot in the G meter at 1.5 G, it is good reference for minimum G you can sustain at all altitudes below about 2,000m. I made my own color coded picture with yellow/red as danger zones Also: the effect of the entire podkhvaht/pick up was made smoother in a patch recently 2. Your second issue, tail authority My first suggestion if you you are not overweight or at too high altitude, is watch your Yaw AP. Your AP can add/subtract anywhere from 18-118% authority, and trim you without your consent. Check if you have an option “Pedal auto move” on. You want to have it off. Turning it off means that if Yaw AP runs out of its 18% authority, it will trim your pedals to use as much authority as it needs. Having it on means that pedals will trim you anytime heading moves more then 7.5 degrees from the heading it’s trying to hold I tell most new flyers to keep Yaw AP off. And to only play with it once you are ready to play with the microswitch and all the microswitch options the change the Yaw AP from heading hold to dampening. If you are interested, let me know. I have also written large guides for weapons and autopilot and translated an aerodynamic manual for it.
-
Expectation on Air to Air missiles of the MiG-29A?
AeriaGloria replied to pepin1234's topic in DCS: MiG-29A Fulcrum
Kuznetsov updated model did come with Supercarrier? That was whole reason for Su-33 bundle -
If you mean original R-77 RVV-AE and R-77-1, I haven’t seen anything but speculation about the wings folding. Is there any evidence?
-
SFM Performance and Inaccuracies
AeriaGloria replied to Curly's topic in Aircraft AI Bugs (Non-Combined Arms)
This is fantastic! You found some amazing sources I haven’t seen before!!!! BRAVO BRAVO!!! Do you think you or I could make a separate report on dispersion for main player aircraft? Right now dispersion for 37mm is something like 13.6 mil for 80% circle. Your source says it ranges closer to 5-6. Also, NR-23 I think currently has 5.6 mil dispersion for 80% circle, but your source says 9.6 mil! Would swap rolls of the guns, making 37mm the accurate one and NR-23 the wider spray, which makes sense considering it’s rate of fire -
Anyone know what the installer angle of the gun is on MiG-21bis? It seems to often need to be aimed a mil or two above the center of the fixed grid when firing on targets even 700-1000m away. On 15/17, sight is pointed down 0.5 degrees to intersect Arc of bullets. On 19, guns are tilted 0.3 degree up for same reason. Wonder what it is for 21bis, I wonder if it would have clearance if it was pointed 0.3-0.5 degrees up
-
I will try this mission with and without the alt/speed. I not only want to see a difference between the mode on and off, but also want to see pitch channel deflection: it should be very obvious and move pitch channel 100% for 10 kmh deviation
-
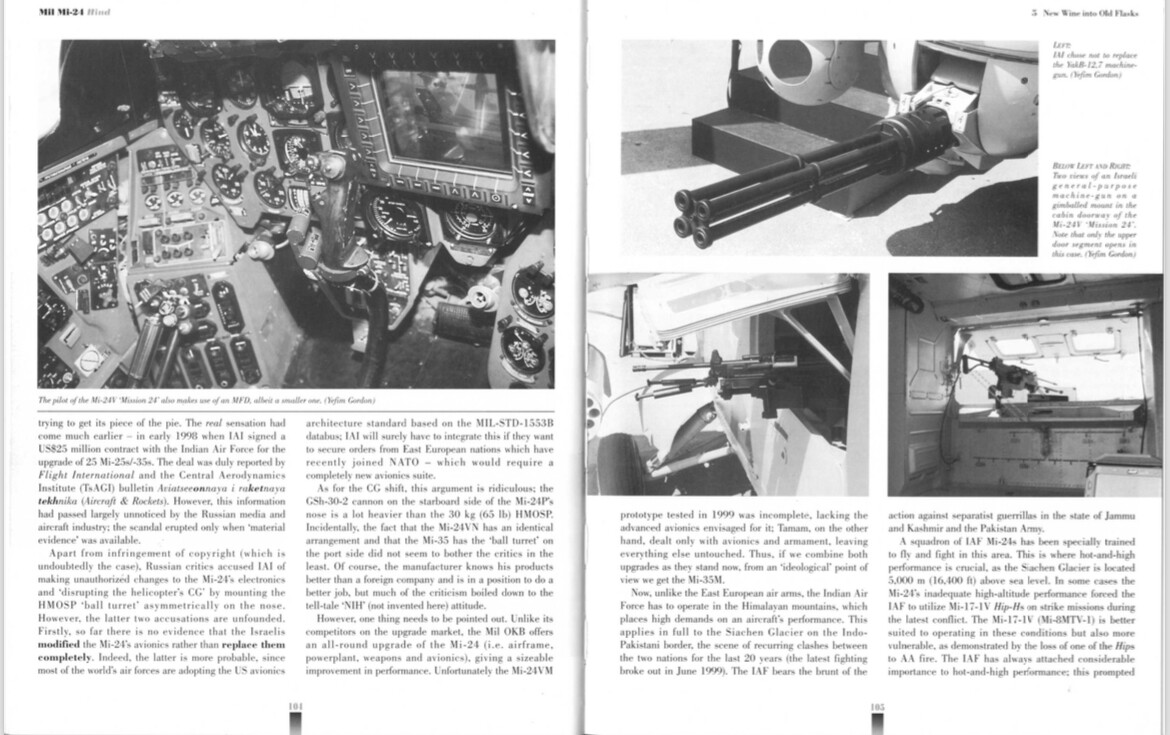
This is just Hydra pod. You can see rockets do not stick out enough. This picture was taken at 43rd Paris artifice salon 1999. APKWS wasn’t flown until 2005. This upgrade was sold to India and is basically today there modernized Mi-35 “Akbar” Other excerpts from Yefim and article on Indian Hinds https://airpowerasia.com/2022/03/10/akbar-nama-story-of-mi25-35-family-with-the-indian-air-force/
-
gear retracts when Copilot Gunner Position is occupied
AeriaGloria replied to Talvid's topic in Bugs and Problems
What’s your Petrovich auto handover setting? It is likely Petro -
You can with FC3 MiG-29 and Su-27/33 right now. Change CSID of one weapon you don’t need much (say FAB-100, RBK, R-27T), to another weapon. Then one it’s spawned with that loadout or weapon chosen, the new weapon is chosen. I believe some servers already do this for HARM. GS server already does it to add PL-12/SD-10/PL-8 to J-11A
-
Petrovich cannot see units that are in plain view
AeriaGloria replied to whataboutbob71's topic in Bugs and Problems
I have seen the same thing since the clutter simulation was added. I believe Lazzy Seal worked very hard and also had us at BSD give times of how long it took us to pick targets with periscope in cluttered areas. Maybe it needs toning down a bit, and sometimes I think “if I just have Petro look here for 10-15 seconds maybe heI’ll find it” but only happens occasionally. I think it was a really good addition and Petro is still better then human in a few areas, but just might need some tuning -
investigating DC voltmeter - Incorrect reading for Rectifier Bus I
AeriaGloria replied to K-dot-B's topic in Bugs and Problems
Yes they are both about 24 volt. Apparently rectifier connects to battery bus when battery is low, but can’t find anything out beyond that. Probably have an electronic schematic around somewhere… -
Petrovich cannot see units that are in plain view
AeriaGloria replied to whataboutbob71's topic in Bugs and Problems
I’ve had tracks work quite well for me the last few patches. I think there was a patch note a few patches ago that mentioned adding periodic syncing to tracks. I have successfully run back multiplayer missions with 20-30 players no issues, only occasional client/server desync you would see live -
Also of note, the article you quoted mentions vertical scan area when under Beryuza/Lazur guidance, I believe in other modes it defaults to a 10.5 degree 4 bar scan while it often does 6 bars under GCI guidance. It’s a shame we’ll get it after release