Yo-Yo
-
Posts
17758 -
Joined
-
Last visited
-
Days Won
8
Content Type
Profiles
Forums
Events
Everything posted by Yo-Yo
-
If you have right IAS as you chop the throttle and are not too high over the runway, it's safe. Or if you perform final at idle but have enough speed to flare and do it right, at the right altitude over ground, it's safe. The plane will sink or even stall wing down if the flaring is too long, and the extra speed reserved for flaring is gone.
-
Каждая задача имеет очевидное, простое, но неправильное решение. Здесь нужно изменять не затяжку, а ЖЕСТКОСТЬ пружины. А это совсем не то же самое. А если делать быстрый и мощный мотор, который тянет или отпускает пружину, создавая требуемые мгновенные усилия, то проще уже просто с PowerFFB. А если уж медленный - то это нужно менят передаточное отношение к пружине. Причем в очень больших пределах.
-
 С большим опозданием дошел до меня номер виртуального журнала "Вирпил", в котором в очередной раз поднимается вопрос управления в симуляторах. Wad попросил что-то сказать по поводу этой статьи. Получилась целая рецензия. Очень надеюсь, что в итоге вопросы по управлению будут окончательно закрыты, и предложения о "резиновой ручке больше поступать не будут. virtpilot30.pdf Будем считать это краткой и неполной рецензией на статью.doc
С большим опозданием дошел до меня номер виртуального журнала "Вирпил", в котором в очередной раз поднимается вопрос управления в симуляторах. Wad попросил что-то сказать по поводу этой статьи. Получилась целая рецензия. Очень надеюсь, что в итоге вопросы по управлению будут окончательно закрыты, и предложения о "резиновой ручке больше поступать не будут. virtpilot30.pdf Будем считать это краткой и неполной рецензией на статью.doc -
С большим опозданием дошел до меня номер виртуального журнала "Вирпил", в котором в очередной раз поднимается вопрос управления в симуляторах. Wad попросил что-то сказать по поводу этой статьи. Получилась целая рецензия. Очень надеюсь, что в итоге вопросы по управлению будут окончательно закрыты, и предложения о "резиновой ручке больше поступать не будут. Будем считать это краткой и неполной рецензией на статью.doc
-
Yes, the turbulence, as you feel it, becomes lower as you climb. It is well known phenomena, because the correlation length of the turbulence becomes longer with altitude. Tests conducted shows that strong (for pilot's opinion) turbulence at 300-500 m feels like very light at ~2000 m and higher. It is not relevant for in-cloud thunderstorm turbulence because it has very different nature and velocity distribution.
-
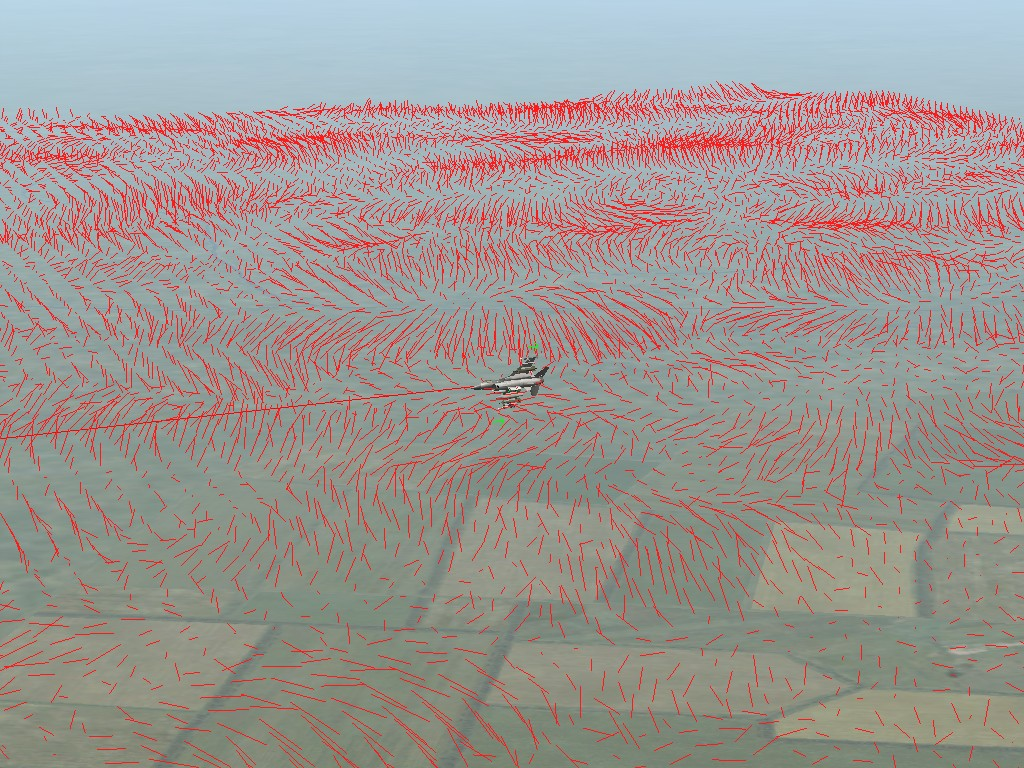
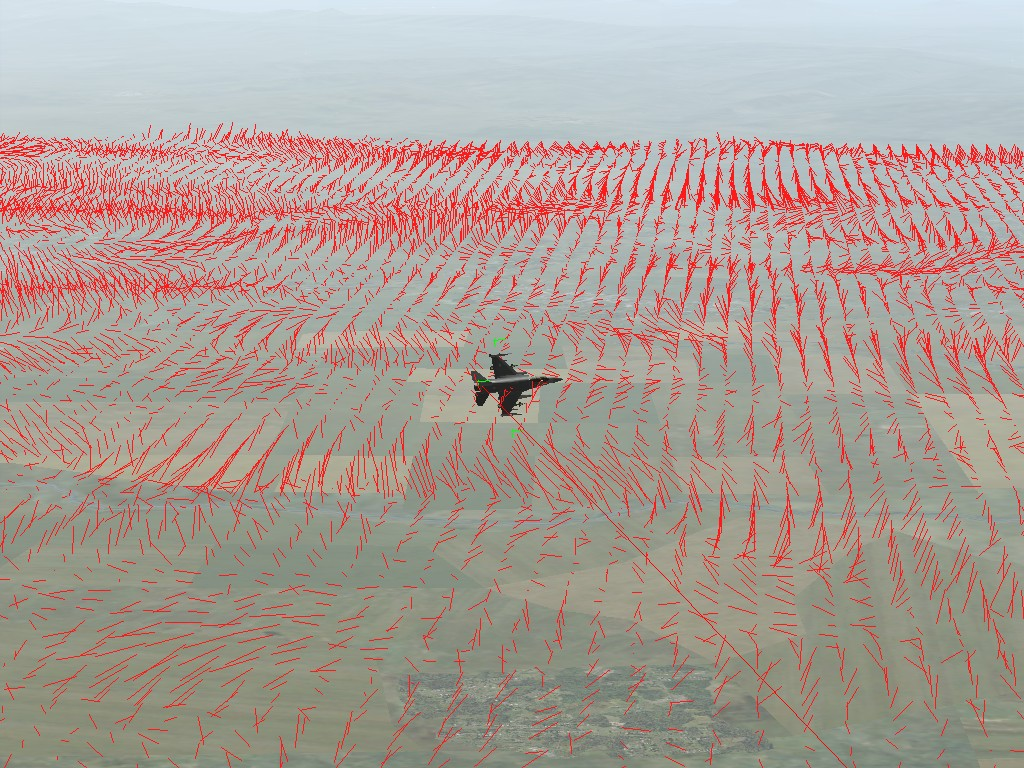
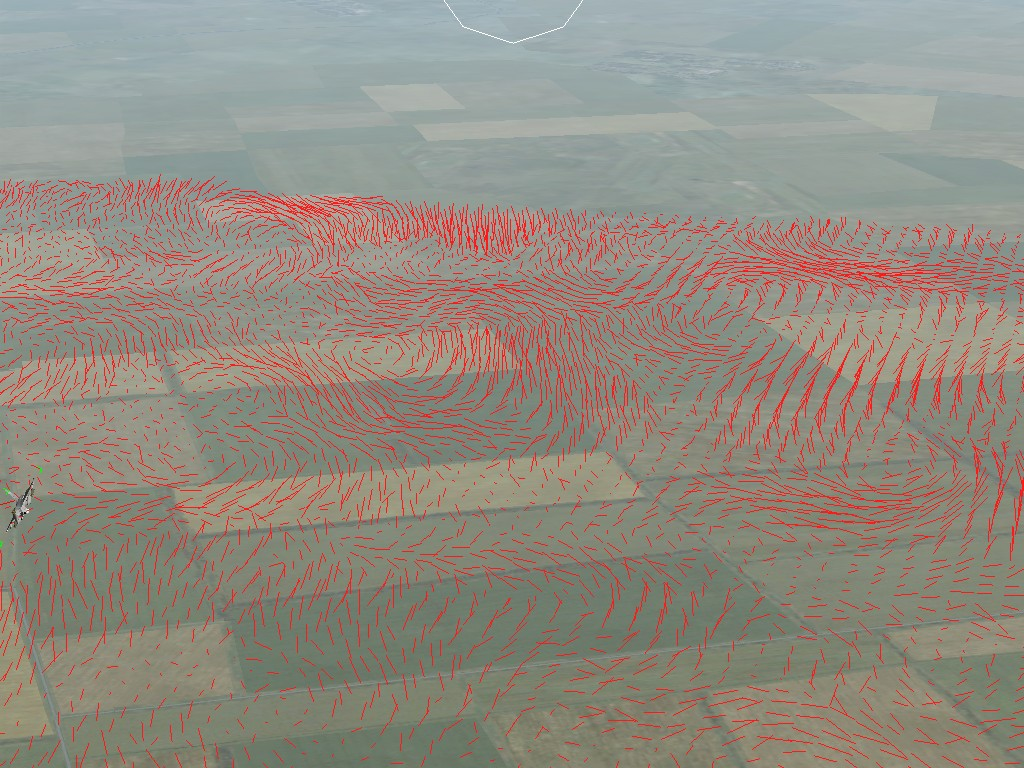
It is not correct to say that turbulence in DCS works only with wind. Yes, setting the wind speed sets a small amount of turbulence that allows to fly in relatively comfort conditions. But the turbulence itself can be set independently. In this case plane acceleration can jump very severe. For example, if the dispersion of g-load is 0.3 and more, pilots describe it as "very strong", so it's possible in DCS have the same dispersion, especially at lower altitudes, because the size of turbulence (correlation range) increases with altitude that leads to decreasing "bumps". If you want to encounter turbulence at higher altitudes you need to set wind speed in the layers quite different (speed and/or direction). These are a sample how DCS turbulence works, and what is correlation length or range. Please keep in mind, that the turbulence in DCS is not a function of time affecting a plane, it is SPATIAL function that means that the planes flying in close formation will be affected by the similar (correlated) vectors (but not identical) depending on the correlation length. And, by the way, it's not static - hovering helicopter will be bumping as well. null null null

- 55 replies
-
- 11
-

-

-
Боже, как самокритично...
-
Она зашла в тупик только в одной отдельно взятой голове.
-
Может быть все-таки бан? Чтобы не мучаться? Потому что подобная демагогия уже порядком надоедает. В бане будет время скачать несколько мануалов и их прочесть. Спокойно подумать. Не отвлекаясь на написание длинных и бессмысленных текстов.
-
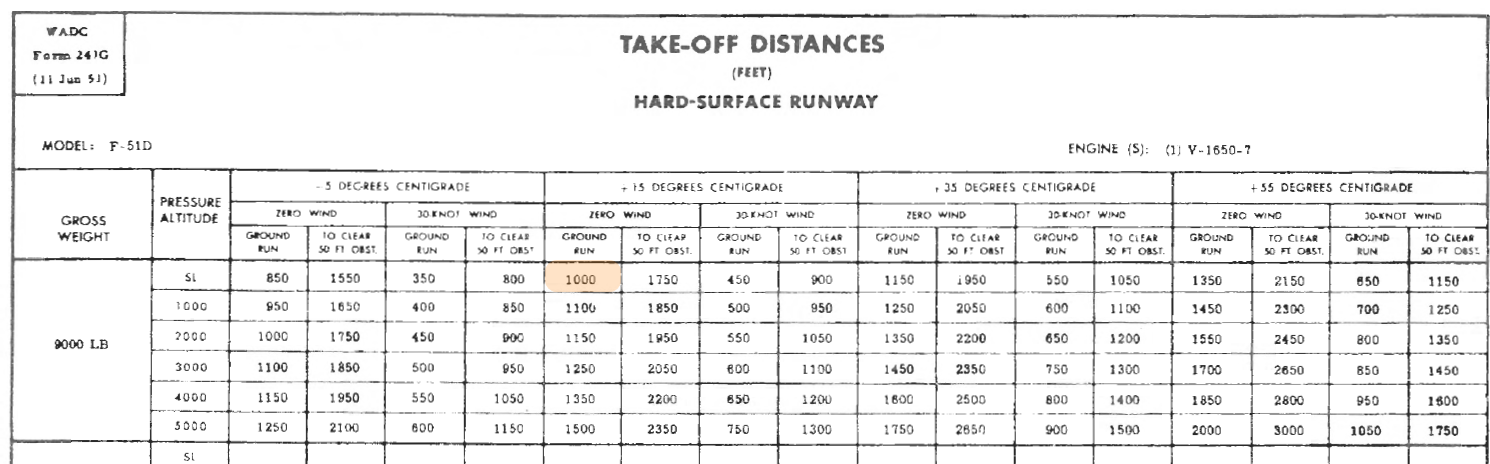
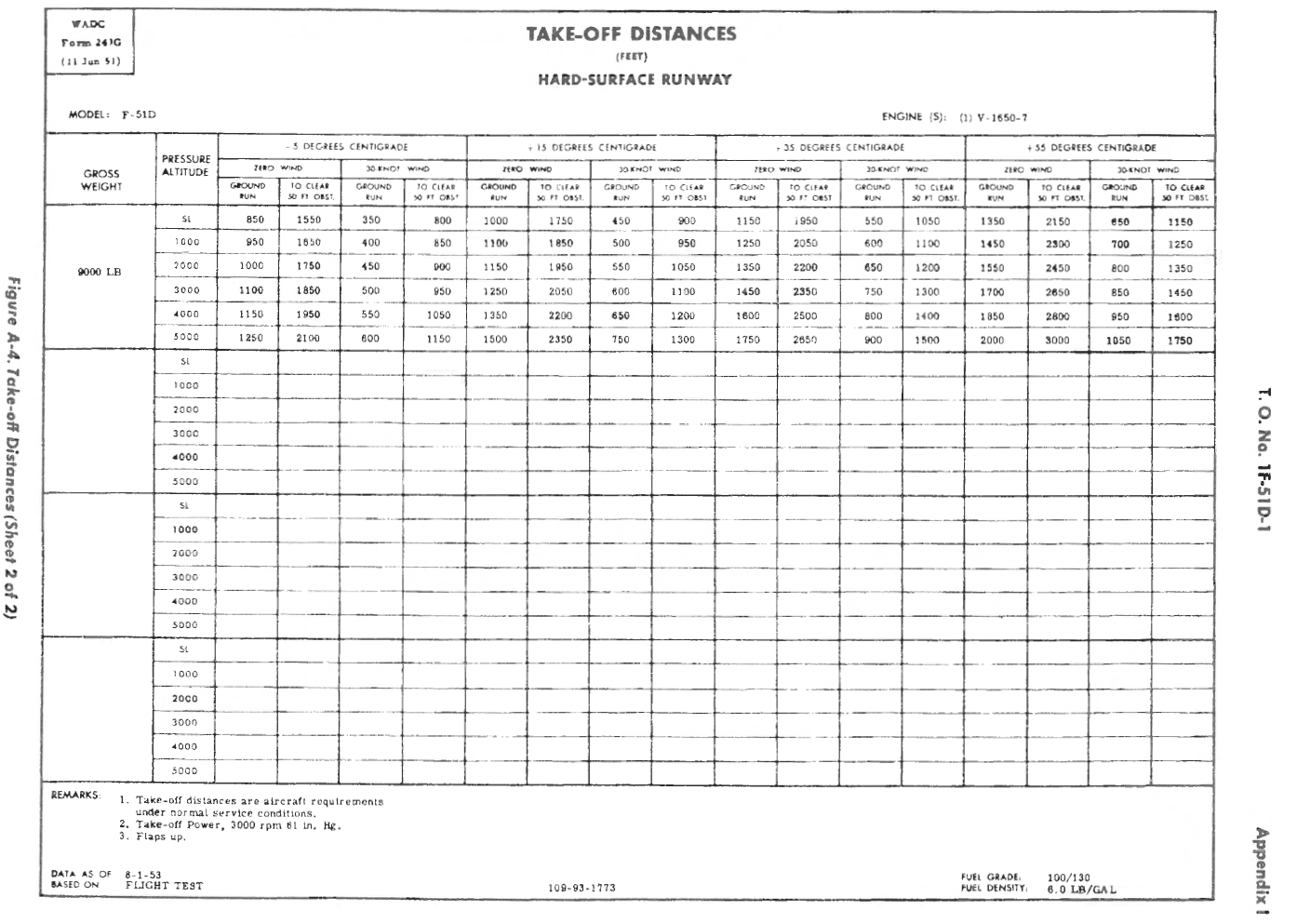
Опять Данниг_Крюгер. Никакого пафоса, просто диагностирую. А теперь стоит попробовать вдуплить, из каких это физических соображений все цифры в таблице округлены до 100 футов, настойчивый вы наш... И почему для идентичных условий получается и 1000, и 1100 футов? (Даже 1120, если считать 80% от 1400 )
-
Ну хватит уже натягивать шар-зонд на глобус..."вроде", "кабысь" ... детский сад. Там номер документа есть. И , прежде чем считать проценты и делать выводы космического масштаба, очень желательно внимательно прочитать все используемые документы, не исключая и текстовую часть, а также - название документа. Тогда может, быть придет и просветление. Иначе сплошной Даннинг м Крюгер в полный рост.
-
Ну тогда на - медаль: nullnull
-
Я не старался попасть, что с первого раза получилось при выдерживании угла, то и получилось. Во втором случае, правда, первый раз самолет не удержал, почему и написал, что это в реальности так noway.
-
В общем вот так, 9000 lb: - как учили (легкий самолет без закрылков и с полуопущенным хвостом с УА примерно 9 градусов) - 1372 фута, - с подрывом (с закрылками 20, с выходом на 16 градусов УА и с хорошей вероятностью убиться даже при стерильной атмосфере) - 792, - с закрылками и выдерживанием стояночного угла ~12 градусов до отрыва - 928.
-
Если делать взлет нормально, как положено, т.е. вводить взлетный наддув на 1-2-3-4-5 (1-2-3 в спите обычно) и не подрывать, а просто создать взлетный УА спокойно, примерно 9-10 градусов, и ждать, то результат будет еще интересней...
-
I'd like to add that "clean" coordinated maneuvers not only are not necessary, for example, during dogfight but must be avoided. Dirty piloting with a lot of sideslip intended or unintended is a good thing to deceive your opponents. Centered ball is a goal for a cruise trim and for low speed/high AoA flight.
-
And, for example, is it a difference between low altitude where the shells "lands" and 2500-3000 where the shells "lands" from the bottom at the same low angles? By the way, 37-40 mm and very often lower calibers used 1 m rangefinders.
-
Any aiming presumes arc, for example, this is trajectory chart used for mechanical calculator for the 37 mm gun. null
-
What AAA you mean speaking about range measuring errors? 88 mm or small calibers?
-
Кажется, я нашел помошника для подобного рода дискуссий на форуме... Ну теперь берегитесь. null
-
Ну так зависимость же прослеживается. У И-16 с его 800-1000 л.с. хватало двух маленьких лопастей, чтобы принять такую мощность. С ростом мощности росли диаметры и/или заполнение диска пропеллера лопастями. И это даже невзирая на то, что увеличение количества лопастей несколько снижает кпд.
-
Вы сначала хоть что-то осмысленное в поддержку своего заявления о неправильности выложите, хотя бы на 10% от того, как это , например, Wad делает, тогда про истину подискутируем. Бот как-то даже разумнее аргументирует. Особенно про испытания пропеллеров в вакууме. null
-
Поговорите об это лучше с chatGPT. у него терпение безграничное (но жестко ограниченое по времени)
-
Кухонная логика - это не переход на личности. Это характеристика логического построения и уровня дискуссии, безотносительно к личности. Кухонная логика - это когда люди были уверены, что Солнце и звезды вращаются вокруг земли, потому что это очевидно и понятно любому, имеющему логическое мышление. Теперь понятнее? И кстати, пример любого винта, хоть самолетного, хоть вертолетного, хоть мускулолетного, хоть у Оспри (а вот там какие винты??) - абсолютно корректен, когда мы говорим о работе винта на месте или на сравнительно малых скоростях, точнее относительных поступях. Что не скажешь про инерцию, увы...
-
С вами дискутировать просто бессмысленно. Кухонная "логика" ваша, к сожалению, также бессмысленна, т.к. очень часто дает глубоко неверные результаты. Ваши доводы должны опираться хотя бы на какую-то инженерную основу, а не на "мне так кажется". "Простая логика, понятная людям"... и громкий нахальный голос. Это действительно сейчас зачастую нравится ширнармассам. "Кто-то поверит"... вопросы веры - это вам в другую епархию. О качестве ваших логических построений лучше всего говорит и ваше упорство по поводу влияния инерции винта на тягу. Ну тогда давайте на потеху тем, у кого логика действительно работает, разберем такой пример: делаем два винта одинаковой формы, полнотелый из стали и деревянный. Момент инерции у них будет весьма разный, хотя тяга будет абсолютно одинаковая. И наоборот - сделаем деревянный подобный винт большего диаметра, но так, чтобы моменты инерции у них оказались равными, а вот тяга будет уже совсем не равна.