All Activity
- Past hour
-

Safety Request: Telemetry flag when the player aircraft is destroyed
Hiob replied to skydenzy's topic in DCS Core Wish List
Imagine the wife/girlfriend, who is already highly sceptical of this expensive af nerd hobby, walking in on you being tossed around by your motion platform.... -
It feels like this is all you need to know about him after reading all this.
-
 Rawr joined the community
Rawr joined the community -
Works like a charm! Thanks a bunch mate!!!
-

«Available for DCS: Ka-50 Black Shark 2»
STONE SKY replied to grimnir's topic in DCS: MAD Black Shark Campaign
Hello! This campaign was created for BS3, and after its completion, the legacy version of BS2 was added. It is playable for both versions. Enjoy the game, save weapons, and don't trust your wingman too much. The best formation is probably a wingman in the back at a distance of 1500m. In this formation, he attacks targets more confidently according to your request. -
 I'd love to see a video of it!
I'd love to see a video of it! -
I support this I understand what you want, and it would be very cool. Brings back fond memories from the past in other games. Do you have the Huey? If you do, try the user mission "I love this job". There he does something similar, but I'm no ME wizard, so I don't know how. Cheers!
-
Could be!
-
@Hippo Haven't been using DCS since January. Seems the behaviour have been changed or I remember it incorrectly.
-
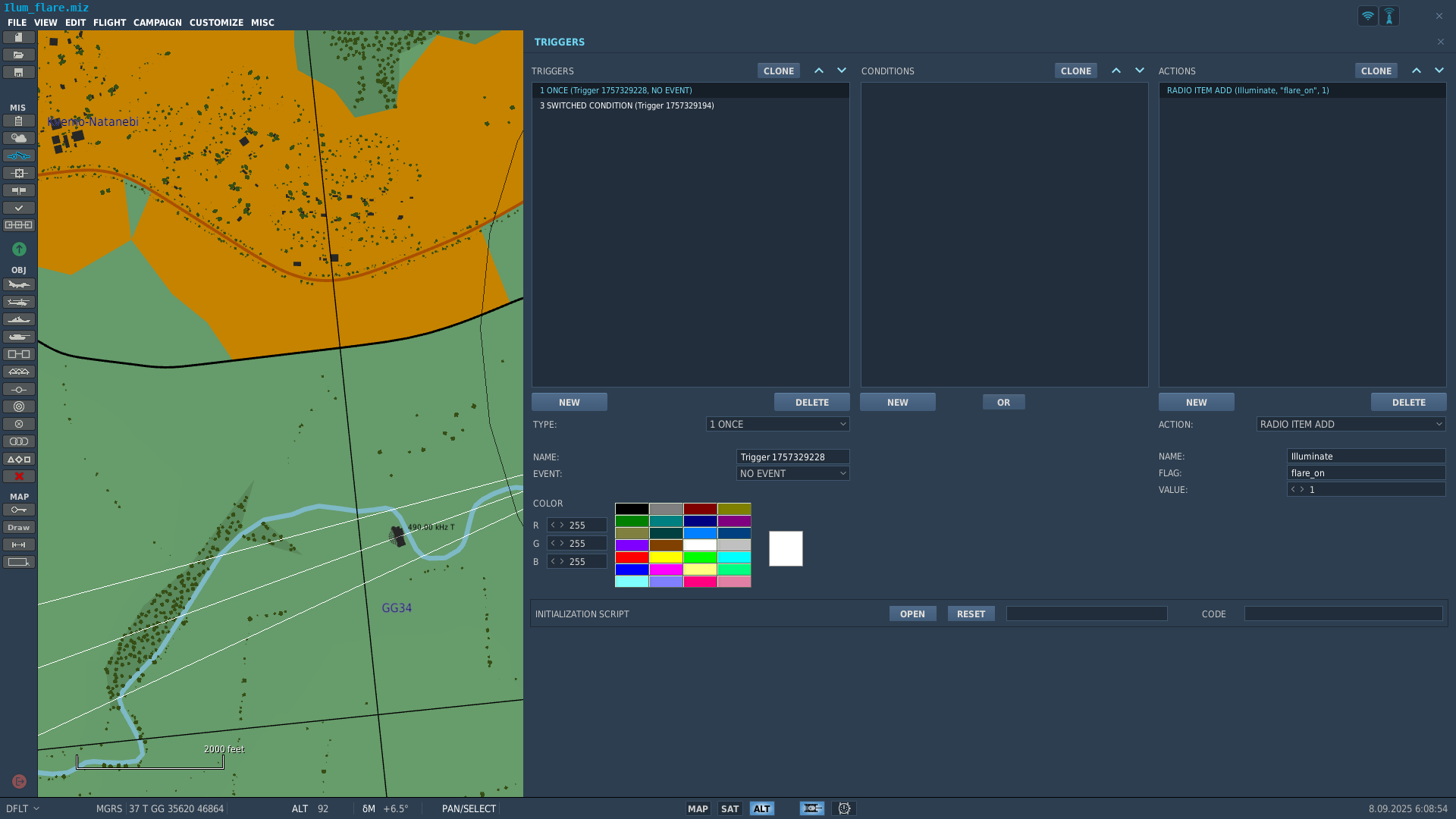
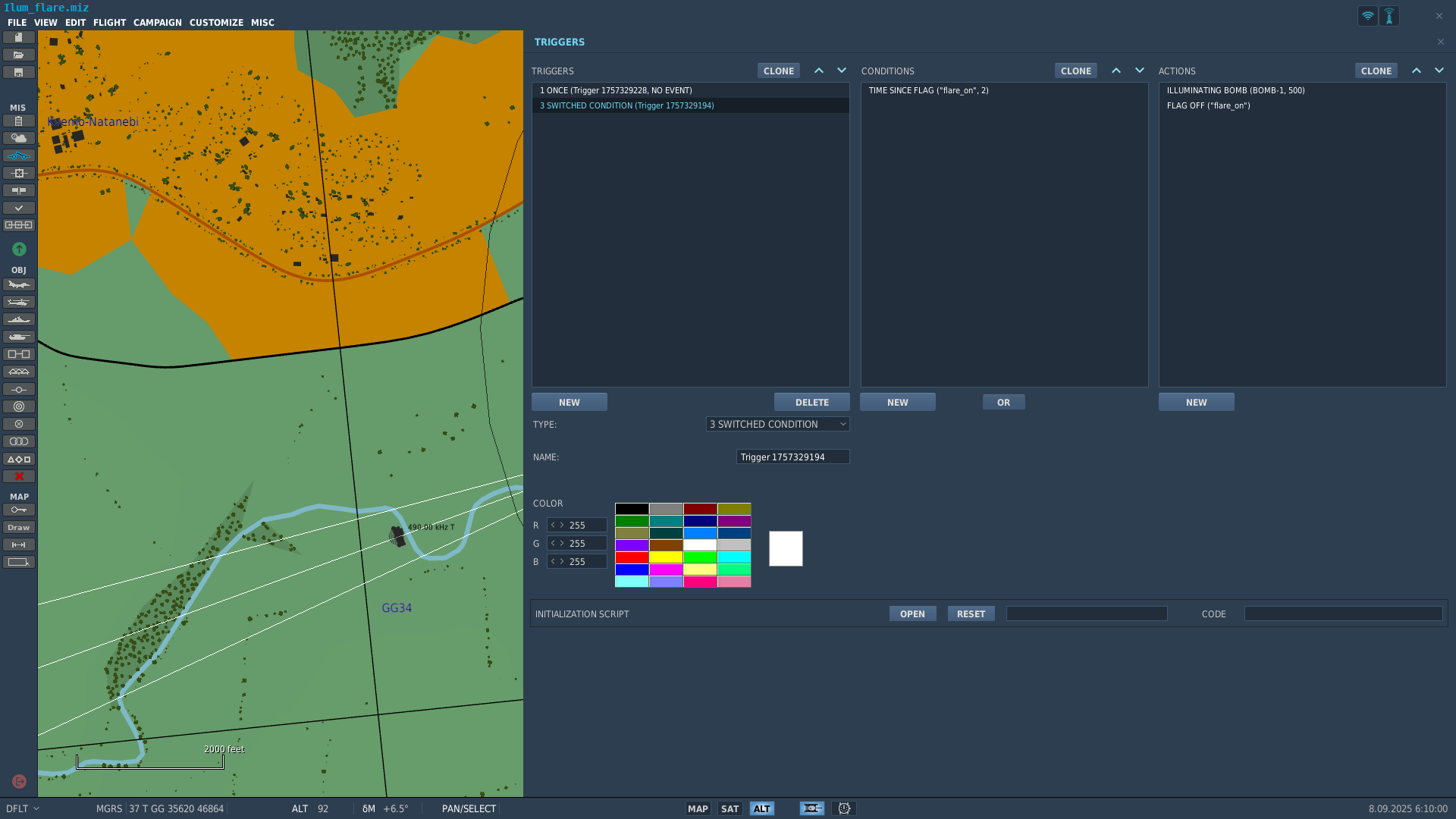
Switched condition with or when activated the flag is set to false. So for example triggering the illumination bomb action via radio command and each subsequent radio command triggers the illumination bomb action. null

-
He's just showing what he wants. He wants a screen with the F1 cockpit view, then a second monitor with the F2 external view, which to my knowledge can't be done without using two computers and multiplayer.
-
Hello, here's the new build https://github.com/landre-cerp/McduDcsBiosBridge/releases/tag/1.2-beta Note the breaking change in the config.json file. ( naming convention fix)
-
Probably. Then we'll need to tune the radio stations after the exhibition. I didn't notice any similar issues during the auto-start.
-
Bridge on the rails at Bayeax station and many others
MAXsenna replied to TBarina's topic in View and Spotting Bugs
Maybe they will get better traction in the various map forums as they're map specific? Cheers! -
An excerpt from my review thread on tracking: Tracking: This is where the Super struggles most. From the start, inside-out tracking was unstable for me: incorrect positioning, jittering in the cockpit, and especially deteriorating stability during long sessions. In my case, the cockpit itself blocks 40–50% of the headset’s visible tracking area. Combined with the motion platform movement, the Super can only rely on the static room environment. My Reverb G2, by the way, never had issues with this. What actually happened: As long as I was looking straight ahead, tracking was somewhat stable. But whenever I turned my head – left, right, or especially backwards – the headset lost orientation and tracking broke down completely. QR codes on the front walls helped a little, but once I looked away from them, chaos returned. After longer sessions, the problem got even worse. The solution: I placed QR codes not only in front but also to the sides and behind me (my platform stands in a corner of the room). Suddenly, the headset tracked much better while turning around. I also suspended QR codes from the ceiling in front of the cockpit, so the headset can pick them up just 1 m away instead of several meters further out. Another crucial step: Before flying, I always scan the entire room with the headset once. Only after that do I recenter VR or calibrate motion compensation. If the headset discovers new QR codes during flight (e.g., when turning around), it seems to re-calibrate mid-air, which in combination with motion compensation led to complete chaos. Since following this procedure, my tracking has been solid and jitter-free. Tracking summary: Place as many QR codes as possible on walls (also sides and rear), and even hang some from the ceiling, close to the seat position. Before each flight, scan the whole room (left/right, up/down). Only then recenter VR and calibrate motion compensation if needed. So for me, placing QR codes very close together across the entire field of view (including to the sides and behind me) solved the tracking issues, even though I’m on a moving platform!
-
No, I meant texture. Looks like texture is broken. Compared to real world picture. Or I am missing something?
-
High Altitude Parachute Deployment Control Unit
-
After several weeks of testing the Pimax Super, I’d like to share my impressions. First of all: my setup consists of a full cockpit mounted on a motion platform – which makes tracking especially challenging. Some of my observations may therefore not fully apply to a “normal” desk setup. 1) Setup with Pimax Play In short: absolutely straightforward and without issues. 2) Headstrap The already much-criticized tiny screws are indeed a bit of a joke. On top of that, the headstrap positioning is unfortunate, since its front edge overlaps with the face gasket. Tightening the strap puts more pressure on the gasket than on my head – not a workable solution. Workaround: By chance, I found out that mounting the strap underneath the face gasket works perfectly. This does not compromise the secure fit or the light seal in any way, but the strap now sits firmly on my forehead and provides solid support. 3) Setup for DCS With Pimax Play alone, performance is underwhelming even with QV settings. Thanks to Tally’s brilliant video on setting up the Super with QV Companion, I now get excellent results – limited to 72 Hz though. I almost never reach 90 Hz in complex missions, but 72 Hz are rock-solid, except during missions with heavily populated airports. Important: After every Pimax update, QV Companion must be reinstalled. Using the OpenXR API Layers GUI, always double-check that the right VR APIs are enabled (e.g., QV Companion) and others (like OpenXR Toolkit) are disabled. 4) Image Quality The resolution is simply stunning – even the tiniest cockpit labels are perfectly readable. Colors look vibrant, and night flying is very convincing. When it comes to Foveated Rendering, the size of the high-resolution area is crucial. If set too small, you’ll notice quality drops in your peripheral vision, especially at night with ground lights. Personally, I prefer flying "only" at 72 Hz with a larger FR zone, which feels much more natural. 5) Tracking This is where the Super struggles most. From the start, inside-out tracking was unstable for me: incorrect positioning, jittering in the cockpit, and especially deteriorating stability during long sessions. In my case, the cockpit itself blocks 40–50% of the headset’s visible tracking area. Combined with the motion platform movement, the Super must only rely on the static room environment. My Reverb G2, by the way, never had issues with this. What actually happened: As long as I was looking straight ahead, tracking was somewhat stable. But whenever I turned my head – left, right, or especially backwards – the headset lost orientation and tracking broke down completely. QR codes on the front walls helped a little, but once I looked away from them, chaos returned. After longer sessions, the problem got even worse. The solution: I placed QR codes not only in front but also to the sides and behind me (my platform stands in a corner of the room). Suddenly, the headset tracked much better while turning around. I also suspended QR codes from the ceiling in front of the cockpit, so the headset can pick them up just 1 m away instead of several meters further out. Another crucial step: Before flying, I always scan the entire room with the headset once. Only after that do I recenter VR or calibrate motion compensation. If the headset discovers new QR codes during flight (e.g., when turning around), it seems to re-calibrate mid-air, which in combination with motion compensation led to complete chaos. Since following this procedure, my tracking has been solid and jitter-free. Tracking summary: Place as many QR codes as possible on walls (also sides and rear), and even hang some from the ceiling, close to the seat position. Before each flight, scan the whole room (left/right, up/down). Only then recenter VR and calibrate motion compensation if needed. 6) Mura Effect Until recently, I didn’t even know what “Mura” was. Now I can identify it: a slight “smearing” effect, noticeable when I look at white clouds while my pupils are focused on the near range. But honestly: in real flying, this doesn’t matter to me. When looking into the distance, I can’t see it at all. When focusing on cockpit panels, the busy background of instruments masks it completely. It’s comparable to driving on the German Autobahn with a dirty pair of glasses at 250 km/h (which I actually do every day). In theory, there’s a smear on the lens, but in practice you’ll never notice it – your eyes are focused elsewhere. Conclusion After solving my tracking issues, I’m very impressed with the Pimax Super. Resolution, colors, stability – fantastic! Despite the (for me solved) weaknesses in the headstrap and tracking, I would buy it again without hesitation.
-
- 1
-

-
Thanks, very glad to get it sorted! I will add, it wasn't actually me bumping the button - it seems that inputting the Initial Position coordinates and then selecting 'SEA' mode to align the INS immediately shifts the COM2 to Manual Mode. Weird, hope this helps someone else! Here's the track HARRIER RADIO.trk
-
Indeed, I hadn’t flown the F-4 in a few months so I wondered if it was a new addition… But that sound is exactly the same regardless of airspeed, even on the ground
- 1 reply
-
- 1
-
- Today
-
This ☝
-
You're probably right, and I agree. [emoji1303] Sent from my SM-A536B using Tapatalk
-
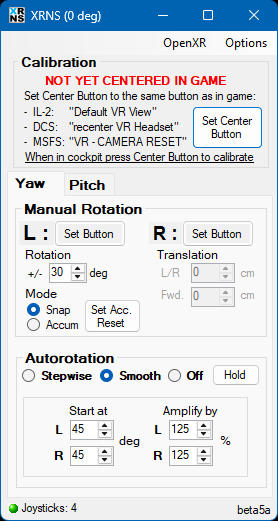
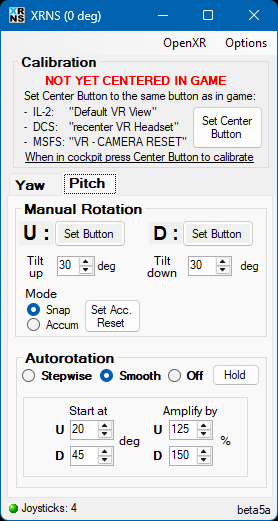
I've always used the OpenXR plugin "XrNeckSafer" to great effect. And I prioritize this mod over pretty much everything else, like DFR which doesn't work with this addon (= dynamic foveated rendering, which would give me way better performance). The problem seems to be: this tool has been outdated for a long time now and even though it still works, it is resulting in a choppy DCS gameplay, rendering it pretty much useless So, for the sake of everyone that's older, has a bad neck and/or neck injuries, I'd suggest this to be implemented; as an addon like hand-controllers. For anyone unfamiliar with the tool, here are some screenshots and the most important settings: recenter view + NeckSafer with the VR-recenter-button set Yaw + Pitch separately for left/right/up/down set starting angle (so you can look around the cockpit 1:1 speed) set amplification (how much should the speedup be; ie. how far back/up/... would I like to be able to look) null Not requiring external tools and hobby programmers that abandon their work like in this case, by incorporating such features into DCS could potentially help everybody! nullThanks for your consideration!
-
When in DCS and controls setup you just click OK and it's saved. Unless you also use external software for the controls - I won't help you with that. This video should help you understand how to setup software detent: This can help you calculate it faster: https://www.digitalcombatsimulator.com/en/files/3315617/ For the zoom - find the camera view zoom in the axis settings and assign it for the throttle device. Now move the rotary fully one side and back - it should be detected - now just click ok and you're done. If the aircraft setting doesn't work check the UI or General category instead of Su-27.
- 1 reply
-
- 1
-
-
Excellent! Glad you figured it out and got it working. Have great flights! )
-

Урон от ФАБ-500 очень низкий! В чем причина?
Mikeyfry replied to Andrey_BZL's topic in Баги и Проблемы
Предположу, что некогда людям заниматься старыми красными модулями. Как с бородатых времен характеристики установили, так и пылятся. Жду исправление случайной детонации бомб в воздухе от парных/ковровых бомбардировок ещё с января (не будем копаться, заявляли ли о данной проблеме ранее). Может с выходом МиГа что-то поменяется в плане обновлений свойств красного вооружения. Что бы соответствовать новому модулю. Иначе будет забавно кидать петарды 500кг и только пехоту ими пугать.