LeCuvier
-
Posts
3535 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by LeCuvier
-
I did the boresighting on the ground, using a vehicle at the far end of the runway. Once airborne with TGP and MAV display live and set, I selected the target steerpoint. I could never figure out where the TGP was looking then, but certainly nowhere near the steerpoint. I tried the whole thing again, with the same result. In the end I killed target by setting the MAV to BOR. So for the time being I will only use the MAV in airstart missions.
-
Thanks for the information! The boresighting process seems horrendous to me, I'm not goig to spend time with it. I will just avoid missions that start on the ground. I had originally created an additional problem to myself by not changing the target steerpoint elevation to ground zero. Once I fixed that, MAV usage in an airstart mission became a piece of cake. Actually, easier than in the A-10C and also easier than in the Hrnet.
-
I want to use Preplan mode with Auto handoff. From Wags' video I understand I have to set the MAV to "PRE". Are you saying I need to set it to "BORE" before I set it to PRE? I have tried this and I got as far as seeing a message like "Attempting Handoff...", but the handoff apparently did not succeed. For me this is not solved.
-
I have watched the video provided by Wags about 10 times and I believe that I'm doing it right. I have the TGP looking at the target (located via steerpoint) and set to AUTO. The MAV is set to PRE and shows the "S" for slaved status. However the MAV's view is not correlated with the TGP, it's not far away but not on target. And when I press TMS FWD the TGP switches to POINT mode, but the MAV does not react. No handoff. The station indicator shows "T". Any suggestion what I might be doing wrong please? I have tried many times and I'm not getting there.
-
Got it, thanks.
-
It seems to me that we have a redundant binding for "Uncage Switch", which is in addition to the "ENABLE Switch" on the throttle grip. The binding "ENABLE Switch" (Depress function of the "MAN RNG/UNCAGE Knob" on the F-16 throttle grip) has multiple functions depending on the mode you are in, and uncaging the AIM-9 seeker is one of them. So there is no need for the additional "Uncage Switch". I actually had both commands bound to buttons on my TM-WH throttle, and I can use either of them to uncage the sidewinder missile. So I can now remove one of the bindings and bind my China Hat FW to something useful. @NineLine Suggestion to ED: Unless I'm missing something, the Command "Uncage Switch" should be deleted.
-
I'm very surprised your file misses these lines. Normally a simple "Repair" should fix that. In case the Repair doesn't fix it, I attach a screenshot from Notepad++ that shows these lines in line 889 and line 891. I recommend you use Notepad++ for the insertion. If you haven't used Notepad++ before, it's free software you can safely download. In the menu "Language" select "L", then select "Lua". This will ensure you get the right display format for LUA. Good luck!

-
The file "default.lua" under "...\Eagle Dynamics\DCS World OpenBeta\Mods\aircraft\FA-18C\Input\FA-18C\joystick" should contain these 2 lines of code { down = iCommandPilotGestureSalute, name = _('Pilot Salute'), category = _('Communications')}, { down = intercom_commands.MsgHornetBall_EXT, cockpit_device_id = devices.INTERCOM, value_down = 1.0, name = _('Hornet Ball'), category = _('Communications')}, If these 2 lines are missing you would get the problem you describe. That's unlikely but check anyway! I wonder if your installation has a file like "Winwing Super Tarus Throttle & Super libre Stick.lua". If you have such a file then the two lines are probably missing there. Caution: I'm not referring to the "....diff.lua" file!
-
Maybe the update has created duplicate axis bindings in your system. Suggest you check axis bindings and remove any duplicates.
- 1 reply
-
- 1
-

-
Just updated to 2.8.2 and in fact the auto-turn has been fixed, it works like it used to. Now I can go back to flying BS 3
-
I've gone back to the BS-2 as the BS-3 keeps turning away from the target. I'm a bit disappointed that they still haven't released a fix for this.
-
Erich Brunotte * 02 June 1923 - 19 January 2023 †
LeCuvier replied to MACADEMIC's topic in Community News
Mission completed, Erich, ruhe in Frieden! -
ED could certainly provide an axis binding for this knob. It's not an axis I could create myself (I tried). I have bound this command to a rotary encoder. That works quite well.
-
You seem to describe two different problems (which might have a common cause though). 1. You cannot bind the triggers for MG and cannon: Please elaborate, give us more specifics. Include a screenshot of the Options/Controls screen where you try to bind the controls. Note: double bindings don't generally cause issues with gun/cannon triggers. 2. Uncontrollable: This is usually caused by control axes like Pitch, Roll, Yaw (Rudder) being bound to 2 or more game controllers. This is caused by default bindings created by the software, especially when you have newly installed game controllers. It's quite common and I have seen it happen "spontaneously". Go to the "Axis Commands" category and verify that none of these axes has bindings in more than one column.
-
I had a very similar experience. The Warthog stick was ok as long as I flew only the A-10C, but when I started flying the FW-190D I realized the lack of precision. At that time there were hardly any alternatives. Meanwhile I have a VIRPIL base and grip, and I use that for all types of aircraft. Only for the A-10C I use the TM Warthog stick, because it has exactly the right grip configuration. I did try the Warthog grip in the VIRPIL base, and that works fine. It's plug-compatible. Only problem was that the TM grip is very heavy and tends to lean forward, producing a nose-down signal when you relinquish the grip. The green spring sounds like I would try it if I hadn't bought the VIRPIL product.
-
Little (Or Possibly None) Drag from Canopy Open In-flight
LeCuvier replied to Magic Zach's topic in Bugs and Problems
Agree, open canopy seems to add no drag at all in the two FW-190 versions. I close it because of the higher noise level. -
How to set up toggle switches (a tutorial)
LeCuvier replied to Spy Guy's topic in PC Hardware and Related Software
@BIGNEWY I cannot find my original post since the forum was converted to a new platform. I have created a new thread and posted the updated document there: https://forum.dcs.world/topic/270080-lua-editing-for-additional-key-binds-tutorial-no-discussion-here-please/#elControls_4646929_menu -
cannot set key bind for active pause
LeCuvier replied to wanderer108's topic in DCS: A-10C II Tank Killer
I have tried this, and I could bind the "Active Pause" to buttons on my button box and it works. I tried both the bindings under A-10C II and UI Layer. If you want to use the bindings under A-10C II there is a limitation however: You cannot bind the Active Pause command to any button on the game controllers that have a dedicated .lua file (not .diff.lua"!) in the game folder, for eample the TM Warthog throttle and joystick, Saitek X52 Pro Flight Controller etc. That's because these files, unlike the "default.lua", do not include a line for active pause (would be easy to fix by a simple LUA edit). The UI Layer has no such limitation. I prefer using the bindings under UI Layer for common commands, and I have unbound even the keyboard binding under A-19C II as it duplicates the UI Layer binding. -
Keyboard short-cut for weapons load-out?
LeCuvier replied to bofhlusr's topic in DCS: A-10C II Tank Killer
If you use a US-ASCII keyboard iIt's LAlt + ' (left Alt plus apostrophy). On my German keyboard it's LAlt + Ä- 1 reply
-
- 1
-

-
How to set speed brake setting?
LeCuvier replied to bofhlusr's topic in Controller Questions and Bugs
@bofhlusr: If you are willing to do a little .LUA editing, it's very easy to create the command you wish. As you mention you want to set it up as a keyboard command I will focus on that. When you open the file "default.lua" under "Drive\Eagle Dynamics\DCS World OpenBeta\Mods\aircraft\A-10C_2\Input\A-10C_2\keyboard" and do a Search/Find for "speedbrake" you will see this line of code: {combos = {{key = 'B', reformers = {'LCtrl'}}}, down = iCommandPlane_HOTAS_SpeedBrakeSwitchAft, up = iCommandPlane_HOTAS_SpeedBrakeSwitchCenter, name = _('HOTAS Speed Brake Switch Aft'), category = _('HOTAS')}, I break it down: 1. "combos = {{key = 'B', reformers = {'LCtrl'}}}": This defines a default binding of the command to LCtrl + B 2. "down = iCommandPlane_HOTAS_SpeedBrakeSwitchAft": when you push the button down, it will simulate the "speedbrake switch Aft" on the throttle, which makes the speedbrake extend 3. "up = iCommandPlane_HOTAS_SpeedBrakeSwitchCenter": when you release the button, it simulates "speedbrake switch to center" on the throttle, which stops the movement 4. "name = _('HOTAS Speed Brake Switch Aft')" : this defines the name for the binding in Options/Controls You do not want the part 3, and you don't need a default binding. So we define a new command by adding this line of code: {down = iCommandPlane_HOTAS_SpeedBrakeSwitchAft, name = _('HOTAS Speed Brake Extend Full'), category = _('HOTAS')}, You can use any name you like as long as it doesn't duplicate an existing name. After saving your change, you start DCS World and bind the new command to a keyboard button or combination. Ready to go! You need to make a backup of the modified "default.lua" because ED will restore the original file when you update or repair. (I use OvGME because I have lots of additions.) PS: Use the free Notepad++ for .lua editing! -
axis controls for lights and volumes gone
LeCuvier replied to skypickle's topic in Controller Questions and Bugs
It's funny; I had added a bunch of axis comands before ED had added them. Fortunately, I didn't delete my additions. Here they are: {action = 3001, cockpit_device_id = 49, name = _('Engine Instruments Lights Axis')}, {action = 3002, cockpit_device_id = 49, name = _('Flight Instruments Lights Axis')}, {action = 3003, cockpit_device_id = 49, name = _('Auxiliary Instruments Lights Axis')}, {action = 3005, cockpit_device_id = 49, name = _('Flood Light Axis')}, {action = 3006, cockpit_device_id = 49, name = _('Console Light Axis')}, {action = 3011, cockpit_device_id = 54, name = _('UHF Radio Volume Axis')}, {action = 3005, cockpit_device_id = 55, name = _('VHF AM Radio Volume Axis')}, {action = 3005, cockpit_device_id = 56, name = _('VHF FM Radio Volume Axis')}, {action = 3013, cockpit_device_id = 38, name = _('Yaw Trim Knob Axis')}, I think these will still work. You probably know: the "action" number is = Button_No + 3000. The device ID for "LIGHT_SYSTEM" = 49 is good for most of your items. You find other device ID numbers in "devices.lua". -
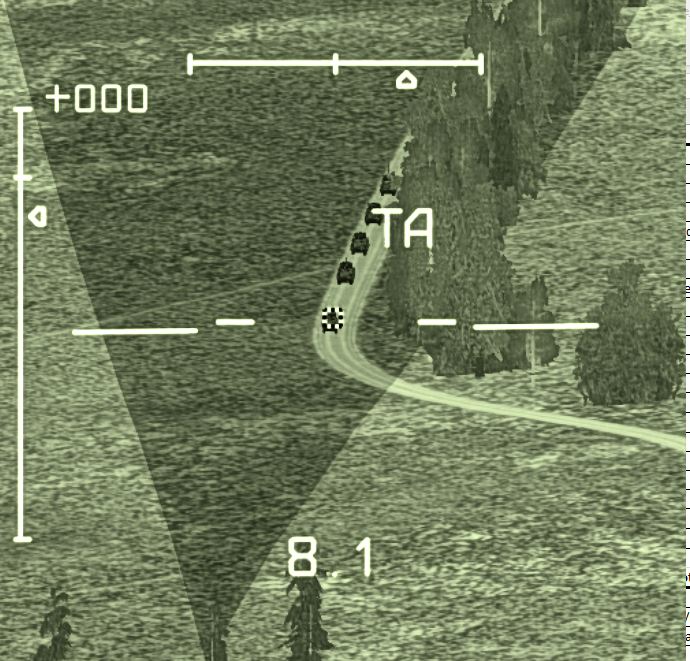
In the mission "Death Valley" which tends to run for an hour or more, I get the triangular shadow every time.
-
I saw something very similar in the Shkval display in Ka-50 III, in the Caucasus map, in 2.8. No VR. I wanted to report, but could not reproduce it. I suspect it's an artefact of the graphics software that appears under some odd circumstances. Edit: I was just running a mission with the Ka-50 III (Death Valley) and after about an hour into the mission, the phenomenon came back. See attached screenshot. Normally I would have reported this under BS-3, but given the similar posts above I don't believe that it's a BS-3 problem.
-
Additional TM Cougar MFDs blanked out
LeCuvier replied to Jakes's topic in Controller Questions and Bugs
The A-10C has a pair of files which have the same function as the "default.lua" but are specific for the two MFD's. They are named "F16 MFD 1.lua" and "F16 MFD 2.lua" respectively. They define which commands are available for left and right MFD resp. The Hornet and Viper don't have that kind of files and are therefore more flexible. You might try to re-name these two files, but I cannot guarantee results (I don't have MFD modules). Even if it works, you will have to repeat that operation after each update or repair, because ED will restore the original files. It might be less trouble to not try to swap the MFD's . -
This keybind exists already for the TM Warhog throttle. I suspect you want it for use with a different kind of game controller. ED have disabled the related line of LUA code in the file "default.lua" by adding "--" at the beginning of the line. You could easily enable the line by removing the "--" using Notepad++ It's line 261 in my rig and it currently looks like this: --{down = iCommandPlane_HOTAS_MIC_SwitchUp, up = iCommandPlane_HOTAS_MIC_SwitchOff, name = _('HOTAS MIC Switch Up (no function)'), category = _('HOTAS')}, Notepad++ shows the entire line in green because the "--" comments it out.